

37. Прямой и косвенный ввод-вывод.
Прямой ВВ-В
Шина – разные провода. Группы: передача адресов, данных, управляющих сигналов.
Шина соединена с контроллерами.

ОС выполняет на ЦП специальную программу (драйвер). Надо передать адрес устройства, буфер памяти. Драйвер должен захватить шину, перегнать по ней данные. В это время шина занята для других устройств. Использовались различные комбинации шин (VAX)
Прямой доступ в память.
Котроллер ПДП освобождает ЦП. Обмен между ОП и к-л устройством. ЦП будет свободен, пока не придет прерывание от устройства.
Косвенный ВВ-В
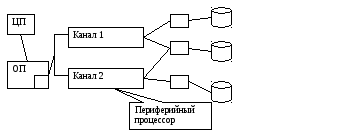

Чтобы записать файл на диск надо знать: адрес диска, адрес цилиндра, адрес дорожки, адрес записи + системе ВВ-В нужен адрес канала и иногда адрес контроллера
Достоинства: ЦП свободен, система ВВ-В формирует адрес. Если 1 канал сломался, будет работать другой (надежность).
Недостаток: сложнее в исполнении и дороже.
Виды каналов:
- селекторные ( работают с 1м устройством, но быстрые)
-байт-мультиплексные (со многими устройствами, но работают медленнее)
-блок-мультиплексные (работает с блоками). Быстрее, чем байт-мультиплексные.
38. Монопольно используемые, разделяемые и виртуальные устройства.
Функции ОС при работе с ВУ:
1. Отслеживание состояния всех устройств. Создается таблица (Unit Control Block) – хранит информацию об устройстве. Информация может быть постоянная (адрес, тип) и переменная (состояние устройства).
2. Планирование:
- кому выделить устройство
- на какой срок
- в какой момент времени
1) Закрепление устройства (монопольное устройство)
2) Разделение устройство
3) Виртуальное устройство (физическое устройство моделируется другим устройством). Например, печать: 1 принтер на много ПК. Создается специальный файл – работа происходит с файлом.
3. Управление – выделение и освобождение.
Все устройства делятся на:
- устройства ВВ-В (не имеют файловой структуры)
- запоминающие устройства (имеют файловую структуру). Их разделяют по времени доступа на:
- ЗУ последовательного доступа. Обладают большой дисперсией. Например, магнитная лента.
-ЗУ прямого доступа (обращение по адресу). Дисперсия меньше.
Виртуальные устройства
Существует устройство, которое работает с никой скоростью, но со многими процессами и нечасто. Ставить много таких устройств – не рационально. Они являются монопольными. Пример – принтер.
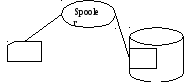
Spooler создает файл с заданиями. Reader берет эти данные как если с ВУ.
1. Очередь выходных работ.

System Memory Block, Data Memory Block
Если печатать по порядку – неудобно, все перепутается.
2. VM 370
ОП управляет виртуальными машинами

Реализация функций управления.
1. Монопольное использование устройств. Состояние устройства – свободно/занято. Свободное можно занять.
2. Разделяемые устройства.
2.1. Учет (отслеживание состояния):
- таблица каналов (адрес, состояние канала, список процессов, ожидающих канал)
- таблица контроллеров (адрес, состояние, список устройств, список каналов, список процессов, ожидающих освобождение контроллера)
- программы, которые формируют путь – таблицы логических каналов.
2.2. Планирование