

Лабораторная работа №1
Описание и принцип действия нечетких систем управления
“Торможение автомобиля на трассе”
Цель работы состоит в описание метода теории нечетких множеств и нечеткой логики процесса торможения автомобилем на трассе и изучения принципа действия полученного в результате нечеткой системы управления.
-
Структура нечеткой системы управления.
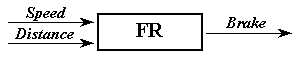
Согласно моему заданию на вход Fuzzy регулятора поступает две переменные (Speed/Скорость и Distance/Дистанция). На основание входных переменных регулятор должен выдать решение в виде выходного сигнала (Brake/Тормоз), который соответственно и осуществляет торможение автомобиля.
-
Описание лингвистических переменных.
|
Speed (S) |
Distance (D) |
Brake (B) |
|||
|
|
|
|
|||
|
S. Very Big |
120 |
D. Very Big |
350 |
Percent 100 |
1 |
|
S. Big |
90 |
D. Big |
250 |
Percent 75 |
0.75 |
|
S. Normal |
60 |
D. Normal |
175 |
Percent 50 |
0.5 |
|
S. Small |
30 |
D. Small |
80 |
Percent 25 |
0.25 |
|
S. Very Small |
0 |
D. Very Small |
10 |
Percent 0 |
0 |
-
Формирование функций принадлежности
Для формирования функций принадлежности воспользуемся программой FLOP.
|
|
|
|
|
Графики функций принадлежности. |
||



-
Операции с сформированными нечеткими множествами
Определим для всех сформированных нечетких множеств значения контролируемых и управляющих параметров, имеющих степень принадлежности соответствующему нечеткому множеству равную 0.25.
|
Speed (S) |
Distance (D) |
Brake (B) |
||||||
|
|
|
|
|
|
|
|||
|
S. Very Big |
97.5 |
|
D. Very Big |
275 |
|
Percent 100 |
0.81 |
|
|
S. Big |
67.5 |
112.5 |
D. Big |
194 |
325 |
Percent 75 |
0.56 |
0.93 |
|
S. Normal |
37.5 |
82.5 |
D. Normal |
103 |
231 |
Percent 50 |
0.30 |
0.68 |
|
S. Small |
7.5 |
52.5 |
D. Small |
27.6 |
151 |
Percent 25 |
0.06 |
0.43 |
|
S. Very Small |
|
22.5 |
D. Very Small |
|
62 |
Percent 0 |
|
0.18 |
Для нечеткого множества Speed и лингвистической переменной Speed Big зафиксируем результаты применения к нему операции нечеткого отрицания, операторов концентрации, «распухания» и контраста.
|
|
|
|
Night (оператор отрицания) |
Konzentrationsoperator (оператор концентрации) |
|
|
|
|
Dilationsoperator (оператор «распухания») |
Kontrastintensivierung (оператор контраста) |




Для любых двух нечетких множеств с пересекающимися функциями принадлежности исследуем различные варианты реализации нечеткой логической операции “И” и “ИЛИ”.
|
|
|
|
“И” Minimum |
“ИЛИ” Maximum |
|
|
|
|
“И” Bounded Difference (ограниченная разность) |
“ИЛИ” Bounded Sum (ограниченная сумма); |
|
|
|
|
“И” Algebraic Product (алгебраическое произведение). |
“ИЛИ” Algebraic Sum (алгебраическая сумма) |






-
Описание связи между входами и выходами нечеткой системы управления методами теории нечетких множеств и нечеткой логики.
EСЛИ Speed = SVB & Distance = DB ТО Brake = P75.
Все остальные правила сведены в таблицу.
|
|
SVB |
SB |
SN |
SS |
SVS |
|
DVB |
P50 |
P25 |
P0 |
P0 |
P0 |
|
DB |
P75 |
P50 |
P25 |
P25 |
P0 |
|
DN |
P100 |
P75 |
P50 |
P25 |
P0 |
|
DS |
P100 |
P75 |
P75 |
P50 |
P25 |
|
DVS |
P100 |
P100 |
P100 |
P75 |
P50 |
-
Исследование принципа действия нечетких систем управления
Сформируем передаточную характеристику для логического вывода Max – Min и метода fuzzyфикации Modifizierter SP (модифицированный центр тяжести), так как для нашего варианта это больше всего подходит.
-
Дистанция
10
45
80
115
150
185
220
255
290
350
Скорость
0
0,5
0,14
0
0
0
0,083
0,091
0,082
0,091
0,081
12
0,6
0,254
0,11
0,107
0,094
0
0
0
0
0,091
24
0,68
0,394
0,276
0,185
0,072
0
0
0
0
0,084
36
0,81
0,692
0,56
0,253
0,14
0,056
0,063
0,056
0,062
0,084
48
0,89
0,768
0,645
0,322
0,257
0,172
0,175
0,175
0,168
0,091
60
0,999
0,876
0,75
0,651
0,575
0,5
0,5
0,481
0,386
0,081
72
0,999
0,876
0,75
0,649
0,604
0,604
0,604
0,406
0,168
0
84
0,999
0,876
0,75
0,684
0,688
0,689
0,604
0,416
0,173
0
96
0,999
0,876
0,811
0,816
0,813
0,768
0,675
0,484
0,24
0,056
108
0,999
0,888
0,896
0,896
0,896
0,849
0,752
0,564
0,311
0,175
120
0,999
0,999
0,999
0.999
0,999
0,958
0,856
0,732
0,645
0,5
На основании данных из таблицы была построена передаточная характеристика системы “Торможение автомобиля”.
|
|
|


На основе данных по передаточным характеристикам и графику передаточной характеристики можно определить значения входных переменных, при которых выходная переменная равна 0.7 ее максимального значения (у нас это 0.7 – песочная область).
Установив наши входные значения, которые удовлетворяют показателю выходной характеристики 0.7 можно зафиксировать следующие показатели: график, значение управляющего воздействия и активные правила.
|
Speed |
36 |
|
|||||
|
Distance |
41.6625 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
VS |
SS |
P2 |
0.55 |
||||
|
VS |
SN |
P1 |
0.20 |
||||
|
DS |
SS |
P3 |
0.45 |
||||
|
DS |
SN |
P2 |
0.20 |
||||
|
Speed |
48 |
|
|||||
|
Distance |
68.4375 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
VS |
SS |
P2 |
0.17 |
||||
|
VS |
SN |
P1 |
0.17 |
||||
|
DS |
SS |
P3 |
0.40 |
||||
|
DS |
SN |
P2 |
0.60 |
||||
|
Speed |
60 |
|
|||||
|
Distance |
95 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DS |
SN |
P2 |
0.84 |
||||
|
DN |
SN |
P3 |
0.16 |
||||
|
|
|
|
|
||||
|
Speed |
72 |
|
|||||
|
Distance |
92.875 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DS |
SN |
P2 |
0.60 |
||||
|
DS |
SB |
P2 |
0.40 |
||||
|
DN |
SN |
P3 |
0.14 |
||||
|
DN |
SB |
P2 |
0.14 |
||||
|
Speed |
84 |
|
|||||
|
Distance |
94.875 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DS |
SN |
P2 |
0.20 |
||||
|
DS |
SB |
P2 |
0.80 |
||||
|
DN |
SN |
P3 |
0.15 |
||||
|
DN |
SB |
P2 |
0.15 |
||||
|
Speed |
96 |
|
|||||
|
Distance |
208.9 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DN |
SB |
P2 |
0.55 |
||||
|
DN |
VB |
P1 |
0.20 |
||||
|
DB |
SB |
P3 |
0.45 |
||||
|
DB |
VB |
P2 |
0.20 |
||||
|
Speed |
108 |
|
|||||
|
Distance |
237.8 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DN |
SB |
P2 |
0.16 |
||||
|
DN |
VB |
P1 |
0.16 |
||||
|
DB |
SB |
P3 |
0.40 |
||||
|
DB |
VB |
P2 |
0.60 |
||||
|
Speed |
120 |
|
|||||
|
Distance |
265.85 |
||||||
|
|
|||||||
|
ЕСЛИ |
Distance = |
И |
Speed = |
ТО |
Break = |
значение |
|
|
DB |
VB |
P2 |
0.84 |
||||
|
DV |
VB |
P3 |
0.16 |
||||
|
|
|
|
|
||||
Заключение.
Согласно результатам лабораторной работы можно сделать вывод, что Fuzzy контролеры можно применять в тормозной системе автомобиля. Возможно, что с применением Fuzzy контролеров уменьшилось бы количество дорожно-транспортных происшествий.