


Лектор: Зуев Игорь Станиславович
Разделы iMCS96 (выборочно).
Изложение конспективное. Возможны неточности
Последовательный порт
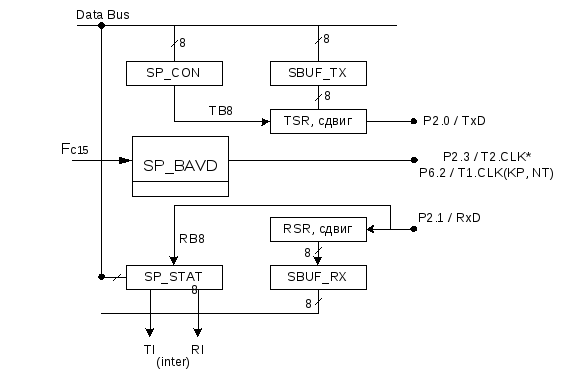
Реализует синхронный обмен и асинхронный обмен информации последовательным кодом. Асинхронный обмен выполнен по стандарту UART(UnversalAsynchronousReceiver/Transmitter). Аналогичен 51-ой серии; в дополнении реализован контроль четности / нечетности при передаче информации и блок генерации частоты обмена не использует общие таймеры Т1 и Т2, позволяя воспроизводить частоту более точно. В следующем рисунке есть неточности.
* (BH, KB, KC)
Преобразование параллельного кода в последовательный
Информация передается на вывод TxD (TransmittData), принимается на входе RxD (ReceiveData)
SBUF_TX– при записи,
SBUF_RX– при чтении два разных регистра.
Полнодуплексный режим – запись и чтение могут происходить параллельно
SP_CON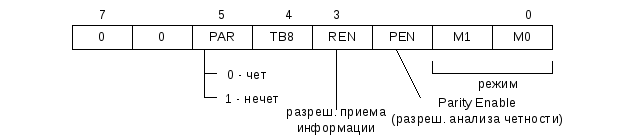
SP_STAT

SP_BAVD– регистр частоты

15 бит содержит константу В, 16 старший содержит clockselect
Протокол обмена
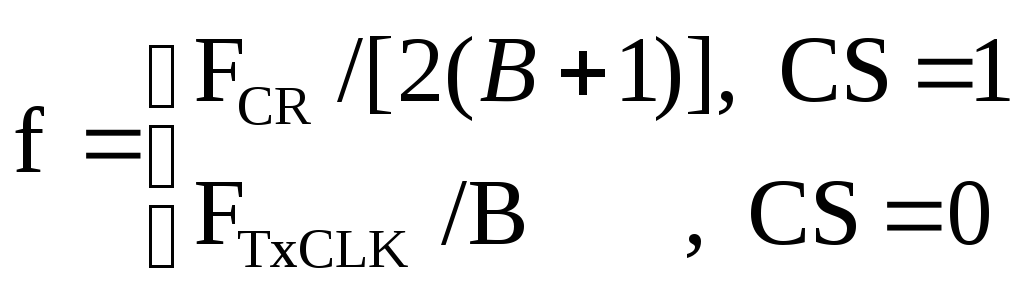
Режим «0»– синхронный обмен
Р2.0 – синхронизация, выдает тактовую частоту обмена
Р2.1 – мы имеем данные (входные – выходные; прием – передача)

Данные считаются действительными на фронте тактового сигнала
Передача:
Флаг REN= 0. передача начинается, когда записан байт в регистрSBUF_TX→TSR→P2.1 → →TI= 1 записан байт в регистрSBUF_TX– информация.
Прием:
Флаг REN= 1 иRI= 0 →RSR→SBUF_RX→RI= 1– параллельный прием в последовательном коде.
В режиме 1-3 порт функционирует как асинхронный приемо-передатчик UART.
TxD– передача;RxD– прием могут происходить одновременно. Пока на выводе 1 то, ничего не происходит; передача началась, когда происходит перепад из 1 в 0.
Режим «1»
Кадр 10 битный.

Режим «2» (11-битный кадр)

Режим «3»(11- битный кадр)
У 9го бита еще больше функций

Передача данных
SBUF_TX → TSR→P2.0 →TI= 1
Прием данных
Только если PEN= 1
RSR→SBUF_RX→RI= 1, прерывание, если
Многопроцессорная связь
Многопроцессорная связь главный процессор находится в режиме 3, подчиненные в режиме 2. Алгоритм передачи данных:
1) главный ЦП выдает адрес, при этом ТВ8 = 1.
2) следствием этого является прерывание всех подчиненных процессоров
- анализ адреса.
- перевод адресованного подчиненного процессора в режим 3
3) передача данных, ТВ8 = 0 (прерывается только адресованного подчиненного процессора)
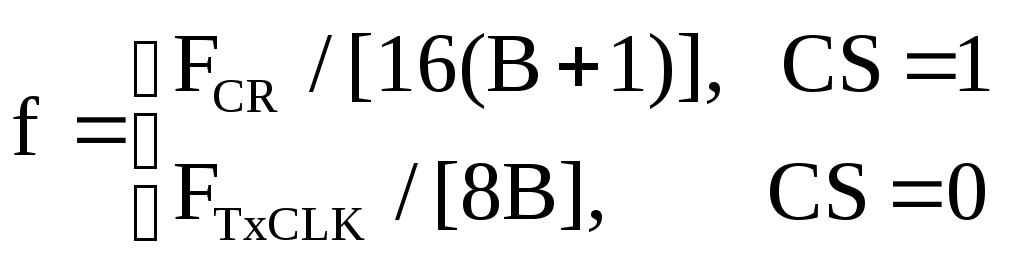
Частота обмена в режимах 1, 2, 3:
Флаги:
TxE= 1 (TxEmpty)TSRвыдан и не поступила информация вSBUF_TX– режим ожидания.
OE= 1 передачаRSR→SBUF_RXзатирает еще не прочитанную информацию.
FE= 1 – (FramingError) – ошибка кадра – возникает, когда при приеме отсутствует стоп бит в ожидаемом месте. При возникновении ошибокOEилиFEвсю информацию необходимо передавать снова.
Контроллер прерываний
Контроллер прерываний может обрабатывать прерывания без перехода к программе
Нужно просто настроить блок
Структура контроллера прерываний
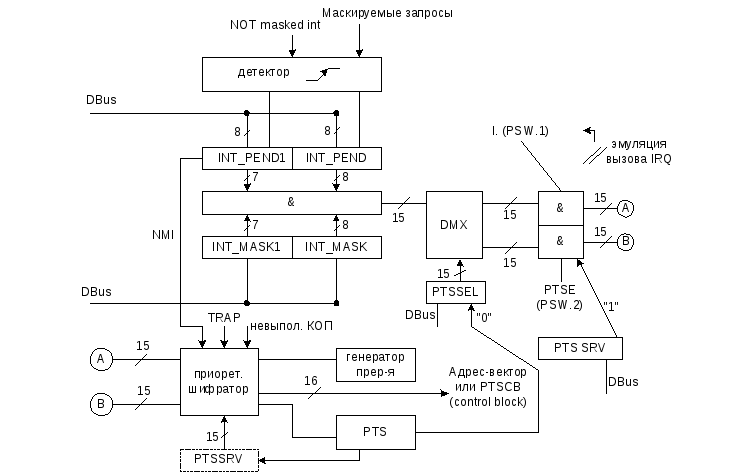
Первый раз нужно сгенерировать прерывание искусственно для этого записать единицу в соответствующий разряд регистра. Естественные прерывания сверху ловит детектор восходящий фронт.
В регистре INT_MASK-разрешение прерываний
ПШ- приоритетный шифратор
В архитектуре регистры разделены на две части, поскольку в начальной серии BH было только 8 запросов на прерывания; 15 запросов являются маскируемыми, то есть любое прерывание, чтобы оно работало, должно быть разрешено. Старший запрос – немаскируемый.
Адрес вектор – есть 16 разрядный адрес перехода на подпрограмму обработки прерываний в данном такте, либо адрес управляющего блока, если обработка прерывания происходит через PTS.
С системой прерывания связаны следующие команды:
PUSHF,POPF– добавка и извлечение флага – заносит в стек регистр -PSW,INTMASK
PUSHA,POPA– заносит в стек регистр -PSW,INTMASKи ещеINTMASK1 иWSR. После выполнения этих команд обнуляются автоматическиPSW,INTMASK,INTMASK1. Данная деталь означает, что
1) все прерывания запрещены каждое в отдельности (так как INTMASKиINTMASK1 равны 0) и запрещены все вместе (так какPSWравно 0).
2) Также позволяется программировать вложенность прерываний. Вложенность прерываний 96 серии: при входе в программу прерываний можно разрешать определенные прерывания, если это необходимо.
Запросы прерывания текущей программы могут поступать от внешних источников или формироваться внутри микроконтроллера в различных периферийных устройствах. Общее число источников запросов прерывания у микроконтроллеров разных типов может быть 21, 28 или 37.
Запросы прерывания могут маскироваться путем посылки кодов маски в соответствующие регистры специальных функций. В микроконтроллерах всех типов имеется программный контроллер прерываний (PIC). Обслуживание запроса прерывания с использованием PIC заключается в переходе от выполнения текущей программы к выполнению другой определенной программы, составленной разработчиком программного обеспечения.
Адрес первой команды каждой прерывающей программы (вектор прерывания) хранится в определенной паре ячеек ПЗУ в области памяти, отведенной для хранения специальных данных. После завершения выполнения прерывающей программы происходит возврат к прерванной программе.
Прерывающая программа в свою очередь может быть прервана при поступлении любого незамаскированного запроса прерывания вне зависимости от соотношения приоритетов запроса, вызвавшего переход к данной программе, и нового запроса прерывания.
В микроконтроллерах некоторых типов кроме программного контроллера прерываний имеется микропрограммный контроллер прерываний (PTS). Любой запрос прерывания, кроме нескольких особых запросов, может быть направлен для обслуживания или в PIC или в PTS. Прерывание обслуживается через PTS, если по соответствующему разряду регистра PTSSEL записана 1.
Обслуживание запроса прерывания с использованием PTS заключается в выполнении типовой микропрограммы, при этом выполнение операций по микропрограмме совмещается во времени с выполнением команд текущей программы или подпрограммы обработки обычного прерывания. Микропрограммы PTS охватывают, в основном, пересылки данных. Прерывания, обслуживаемые PTS, отрабатываются быстрее, чем те, которые обслуживаются обычным способом. Однако, программировать PTS непросто, а отлаживать еще сложнее.
Таблица источников прерывания (источники запросов на прерывание)
|
№ разряда |
RG |
Источники запросов |
Приоритет/адрес вектор: | |
|
IRS |
PTS(KC) | |||
|
0 |
INT_PEND, INT_MASK, PTSEL, 0-7,PTSSRV, 0-7 |
T1 переполнение таймера T2 переполнение таймера |
0/2000h |
15/2040h |
|
1 |
A/D- Аналого-цифровое преобразование завершено |
1/2002 |
16/2042 | |
|
2 |
FIFOполон ( 6 значений, 7ой в резерве) HIS_RG полон |
2/2004 |
17/2044 | |
|
3 |
Любая операция в HSO.0 |
3/2006 |
18/2046 | |
|
4 |
HSI.0 |
4/2008 |
19/2048 | |
|
5 |
Software T0,T1,T2,T3,RESETT2,началоA/D->все вызывают прерывание таймераHS0 |
5/200A |
20/204A | |
|
6 |
TI,RI-> Последовательный порт |
6/200C |
21/204C | |
|
7 |
EXTINT,ACH.7 – внешнее прерывание |
7/200E |
22/204E | |
|
0 |
INT_PEND, INT_MASK1, PTSEL, 8-14,PTSSRV, 8-14 |
TI |
8/2030h |
23/2050h |
|
1 |
RI |
9/2032h |
24/2052h | |
|
2 |
HSI.FIFO 4 |
10/2034 |
25/2054 | |
|
3 |
T2 CAPT |
11/2036 |
26/2056 | |
|
4 |
T2переполнение |
12/2038 |
27/2058 | |
|
5
|
EXTINT1 внешнее прерывание |
13/203А |
28/205А | |
|
6 |
HSI.FIFO – полон |
14/203C |
29/205C | |
|
7 |
NMI не маскированное прерывание |
30/203E |
| |
Возрастание приоритета в таблице от начала к концу!!!