

Случай 7. Постановка к причалу танкера дедвейтом 190 тыс. Т
Судно в балласте, швартовка с помощью трех буксиров по 4000 л. с. каждый. Судно следует скоростью около 1 уз.Для погашения скорости дается малый ход назад. В это время все три буксира начинают медленно толкать судно к причалу, занимая должную позицию (рис. 107).
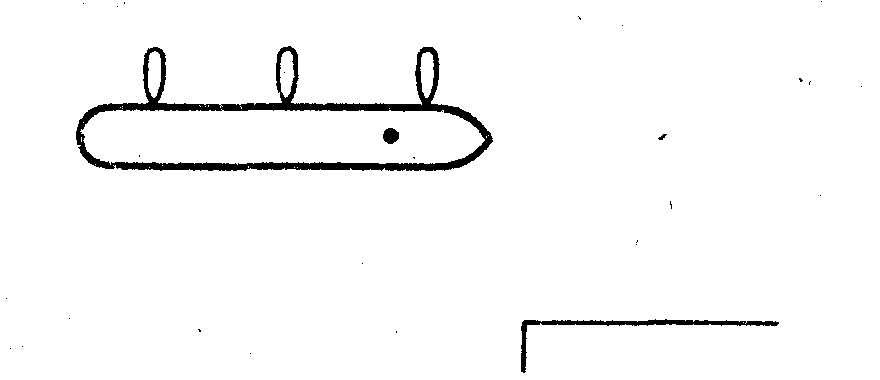
Рис. 107. Учет ЦВ
Если мы предположим, что судно может развернуться вправо под действием поперечного упора винта, то будем удивлены. Судно начинает, наоборот, разворачиваться влево. Это объясняется движением вперед относительно воды, ЦВ все еще находится впереди, в результате чего кормовой буксир имеет хорошее плечо управления. По этой причине следует внимательно следить за направлением движения судна относительно воды, регулировать усилия буксиров и компенсировать* другие силы, действующие на судно. Например, ветер слева по корме, когда судно имеет ход вперед относительно воды, также вызывает разворот судна влево.
Течение еще больше усложняет ситуацию, потому что судно может двигаться относительно воды, не двигаясь относительно причала. При этом ЦВ смещается от миделя в направлении движения судна относительно воды.
На танкере с турбинной СЭУ нужно продолжать работу машиной на задний ход с пониженной частотой вращения до момента, когда судно займет необходимое положение относительно причала, потому что при остановке турбины в машинном отделении могут дать толчок' машине вперед. В то же время для некоторых судов требуется продолжительное движение вперед. При сильном прижимном ветре опасно двигать судно назад для восстановления дистанции, утраченной во время неточного маневра. При смещении Ц В дальше в корму увеличение плеча силы ветра может нарушить равновесие. В этом случае среднему буксиру лучше сдвинуться вперед, ближе к носовому буксиру.
Однако не все суда имеют достаточный набор швартовных клюзов. Поэтому приходится выбирать лучший вариант из плохого расположения клюзов, или отложить постановку - к причалу, потому что безопасность постановки недостаточна. Принимая решение, следует учесть силу ударов волны в нос судна, так как это может увеличить нагрузки на судно до 10—20 тс.
При .швартовке очень помогает доплеровский лаг, дающий поперечную скорость. В описанной выще ситуации показания такого прибора помогают контролировать поперечное движение судна или его отсутствие в момент отдачи команды буксирам работать задним ходом на безопасном расстоянии от причала.
Кажется, что в хорошую погоду легко поставить судно бортом к причалу, когда оно остановлено на некотором расстоянии от причала и параллельно к нему. Однако требуется постоянное наблюдение, оценка текущей и ожидаемой ситуации и концентрации внимания, чтобы поставить судно, не ударив причал при касании.
Необходимо следить за положением судна относительно причала, чтобы судить об относительной скорости: наблюдать за направлением флагов или дыма из трубы для определения направления ветра и временами проверять показания измерителя скорости ветра. Одновременно следить за буксирами, находятся ли они в должной позиции, наблюдать за углом перекладки руля, продольной и поперечной скоростями, частотой вращения винта и показаниями доплеровского лага. Следить также за углом подхода к причалу и показаниями репитера компаса, оценивать силы, которые мешают судну, и пытаться предугадать изменение их воздействия при изменении скорости и направления движения судна.
Концентрировать внимание на различных командах, которые отдаются буксирам, помощнику у машинного телеграфа и рулевому, одновременно осуществлять связь с сигнальщиком на причале для получения информации о положении судового коллектора по отношению к береговому соединению и в случае, если судно имеет короткие крылья мостика, о расстоянии между судном и берегом, когда швартовые тумбы уже не видны на последней стадии швартовки.
В морской практике неэффективность и недостаточность действия экипажа и оборудования создают больше проблем, чем само управление судном (например, судовая связь часто оставляет желать лучшего). Некоторые индикаторы — счетчик частоты вращения, индикатор положения руля и доплеровского лага — нередко не работают;
палубная команда танкеров часто неопытна и слишком малочисленна.
В любом случае независимо от размера и формы судна управление им остается главным в маневрировании. Знания этого помогают нам в процессе уравновешивания сил и предотвращения чрезмерных динамических нагрузок..