

В результат измерения вводится первая поправка (первая итерация):
y3=Kсиx+D+Kсиdx-Dy1=Kсиx-d(D+ Kсиdx). (8.14)
Далее повторяется итерационная процедура.
Результат преобразования y3
![]() . (8.15)
. (8.15)
Результат измерения xоп2:
![]() .
(8.16)
.
(8.16)
Вычисление поправки Dy2 и запоминание:
![]() . (8.17)
. (8.17)
Новое измерение x и внесение второй поправки (вторая итерация):
![]() .
(8.18)
.
(8.18)
Поскольку d<1, то процесс итерации сходится. После n итераций получим результат:
![]() . (8.19)
. (8.19)
При
d<1
![]() ,
следовательно,
,
следовательно,
![]() .
.
Практически полной коррекции погрешности измерения добиться невозможно, так как будут оказывать влияние неточности средств, задействованных в итерационной процедуре.
Основным достоинством итерационных методов является корректирование общей погрешности СИ независимо от вызвавших ее причин.
Недостатки: ограниченная область применения из-за необходимости использования достаточно точного обратного преобразователя; необходимость оценки и учета погрешности дискретизации, связанной с периодическим отключением измеряемой величины.
При реализации итерационных методов с пространственным разделением каналов отключение измеряемой величины не требуется. На рис. 8.5 представлена структурная схема такой системы итеративной коррекции. В состав системы входит несколько одинаковых прямых (ПП) и обратных образцовых (ОП) преобразователей.
Преобразования, реализуемые системой:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
и т.д.
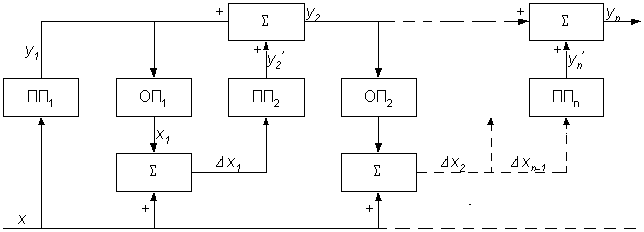
Рис. 8.5. Структурная схема реализации метода итеративной коррекции
погрешностей с пространственным разделением каналов
Поскольку d<<1, то yn»Kппx+D. Это означает, что мультипликативная погрешность скорректирована полностью, но остается аддитивная погрешность последнего преобразователя.
Методы образцовых мер (сигналов) основаны на определении в процессе цикла измерений реальных значений параметров функции преобразования средства измерений путем отключения от входа СИ измеряемой величины и подключения образцовых мер.
Метод предполагает, что функция преобразования средства измерений с достаточной точностью описывается полиномом порядка n-1.
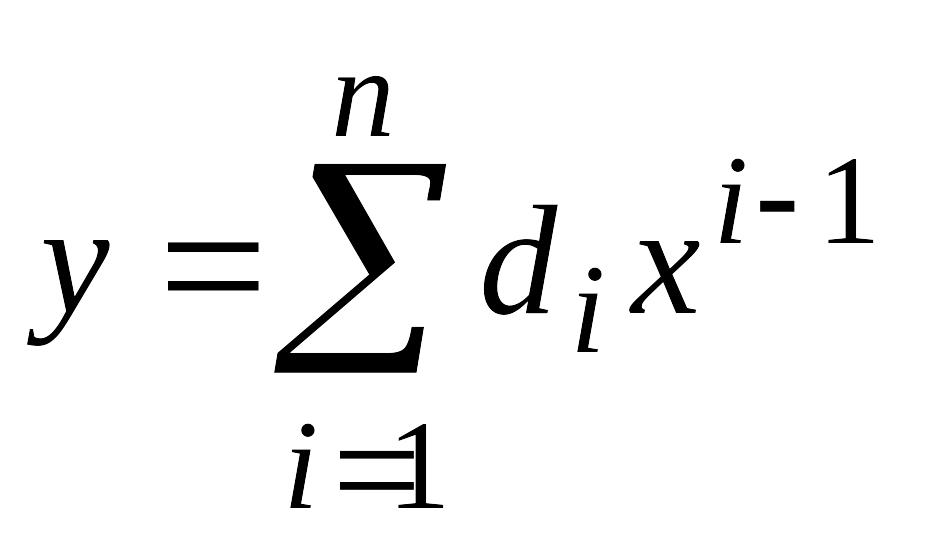 ,
(8.20)
,
(8.20)
где di – коэффициенты функции преобразования средства измерений.
Структурная схема измерительной системы, реализующей данный метод, показана на рис. 8.6.
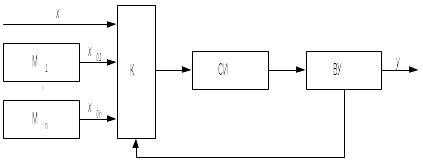
Рис. 8.6. Структурная схема измерительной системы
с образцовыми сигналами
В состав системы кроме средства измерений си входит набор мер м1,…,Мn, коммутатор к, вычислительное устройство ву.
Процедура измерения состоит из n+1 такта. В первом такте коммутатор подключает к входу СИ измеряемую величину x. Во втором и последующих n тактах коммутатор последовательно подключает к входу СИ меры М1, М2,…,Мn с выходными образцовыми сигналами x01, x02,…,x0n. Полученные результаты измерений y01, y02,…,y0n поступают в ВУ, в памяти которого записана статическая характеристика СИ, в виде (8.20). Таким образом, формируется система из n уравнений:
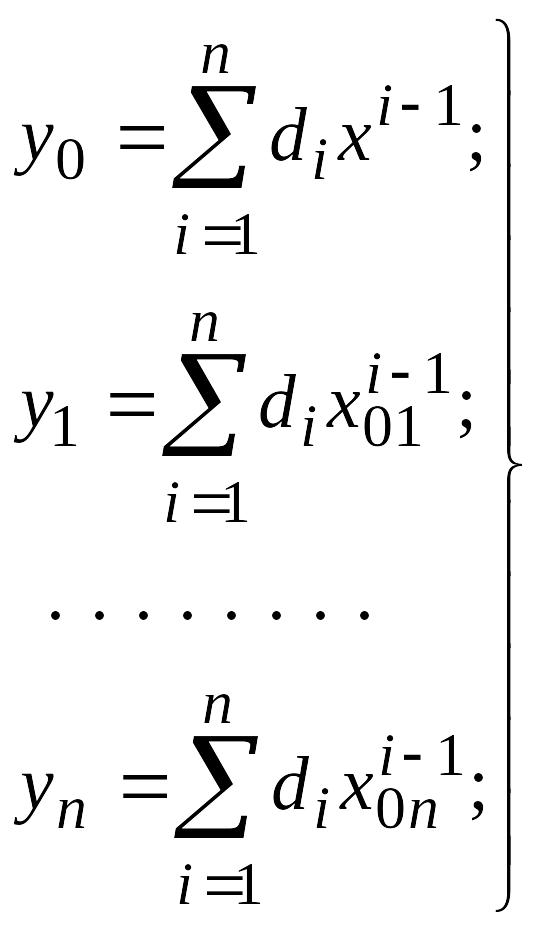 (8.21)
(8.21)
Решая (8.21), ВУ вычисляет параметры d1, d2,…,di , значения которых подставляются в первое уравнение.
Если СИ имеет линейную функцию преобразования, то система (8.21) будет состоять из трех уравнений:
 (8.22)
(8.22)
Решение системы (8.22) относительно x имеет вид
![]() . (8.23)
. (8.23)
Как видно из (8.23), вычисленное значение x и, следовательно, результат измерения не зависят от изменений функции преобразования средства измерений, связанных с изменением коэффициентов di под действием влияющих факторов.
Метод уменьшает как мультипликативную, так и аддитивную составляющие погрешности измерения. Метод применим и при нелинейной функции преобразования средства измерений. В этом случае прибегают к кусочно-линейной ее аппроксимации, при которой связь между выходной и входной величинами выражается в виде
![]() (8.24)
(8.24)
где m – число линейных участков, которыми может быть с требуемой точностью аппроксимирована функция преобразования средства измерений.
Вычисление x производится также по результатам трех измерений:
![]() ,
(8.25)
,
(8.25)
где x0i, x0i+1 – образцовые сигналы соответствующих мер, выбираемые в зависимости от первого измерения так, как это показано на рис.8.7.
Р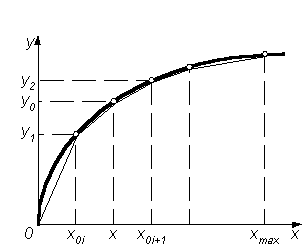 ис.
8.7. Выбор образцовых сигналов
ис.
8.7. Выбор образцовых сигналов
при кусочно-линейной аппроксимации
нелинейной функции преобразования СИ
К недостаткам метода образцовых мер следует отнести частые переключения входных сигналов при измерениях, а также необходимость использования большого количества образцовых мер.
Тестовые методы [23] основаны на получении в процессе измерительного цикла информации не только об измеряемой величине, но и о параметрах функции преобразования средства измерений в момент измерения.
Тестовые методы так же, как и метод образцовых сигналов, предполагает, что функция преобразования описывается полиномом порядка n-1 (8.20), содержащим n параметров di. Общим между этими методами является то, что цикл измерений состоит из n+1 тактов и в первом такте измеряется величина x.
В отличие от метода образцовых сигналов, при последующих тактах измерения используются тесты A1(x), A2(x),…,An(x), каждый из которых является некоторой функцией измеряемой величины x.
Чаще всего используются аддитивные тесты в виде суммы Aj(x)=x+qj, где qj – образцовая величина, физически однородная с измеряемой, совместно с мультипликативными тестами, формируемыми в виде произведения Aj(x)=Kjx, где Kj – известный коэффициент передачи. Тесты третьего вида – функциональные – используется сравнительно редко.
Искомые значения x и значения параметров d1, d2,…,dn получаются решением системы уравнений:
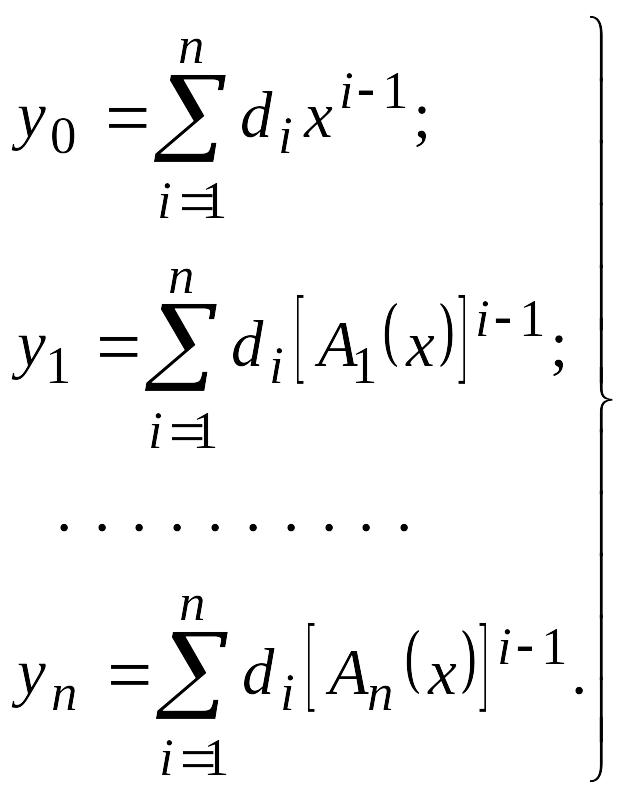 (8.26)
(8.26)
Структурная схема одного из вариантов реализации тестового метода показана на рис.8.8. В состав используемых средств помимо средства измерений и вычислительного устройства ВУ входят блоки формирования БАТ и БМТ аддитивного и мультипликативного тестов и коммутирующие ключи Кл1, Кл2, Кл3, с помощью которых осуществляются такты процесса измерения. На первом такте при разомкнутых ключах Кл1, Кл3 и замкнутом Кл2 на СИ подается непосредственно входная величина x. Во втором такте замыкается ключ Кл1 и на вход СИ подается аддитивный тест x+q. В третьем такте ключ Кл2 размыкается, а ключ Кл3 замыкается и на вход СИ подается мультипликативный тест kx.
|
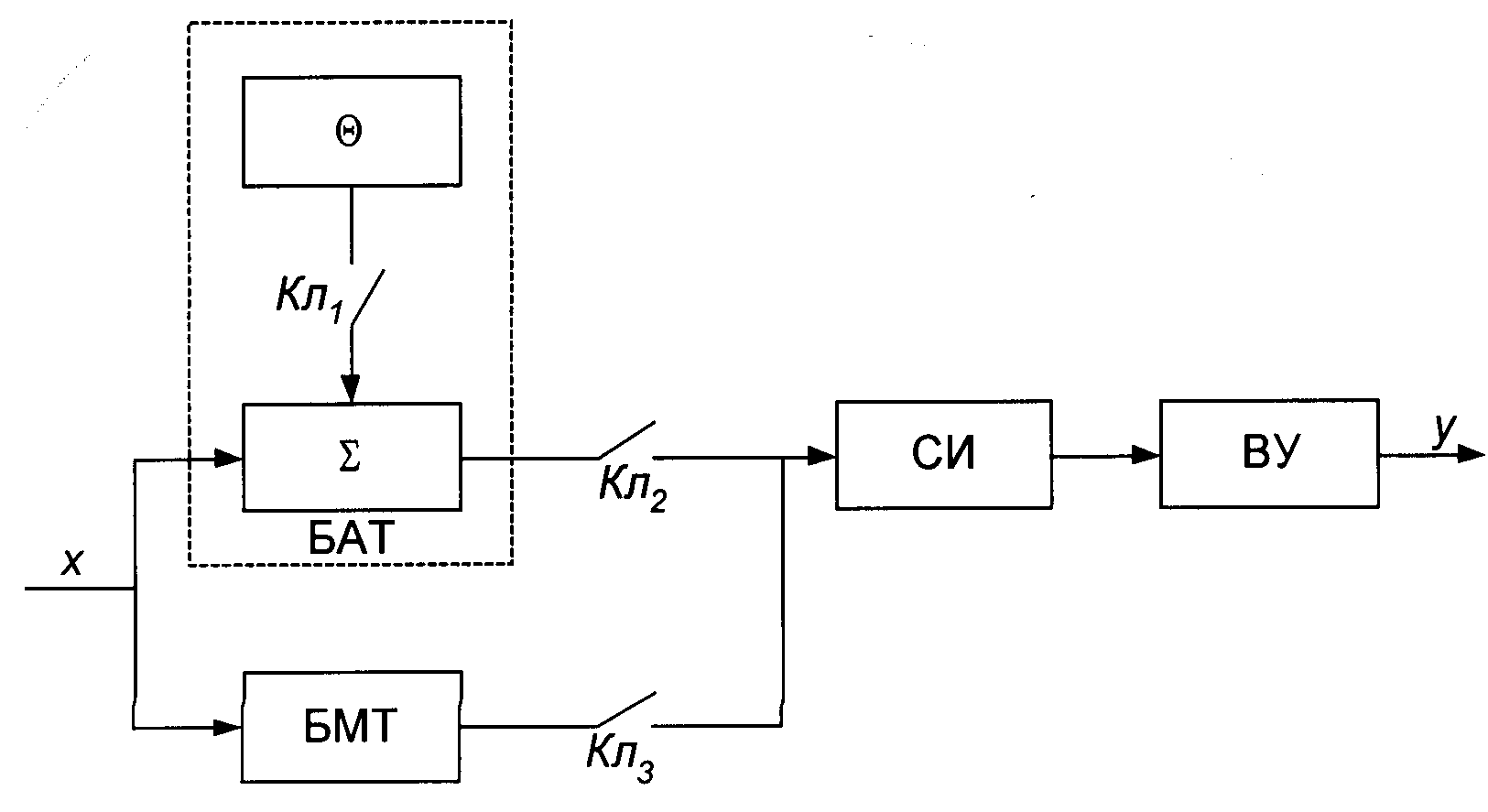
Рис. 8.8. Структурная схема реализации тестового метода
Рис.8.9. Функция
преобразования СИ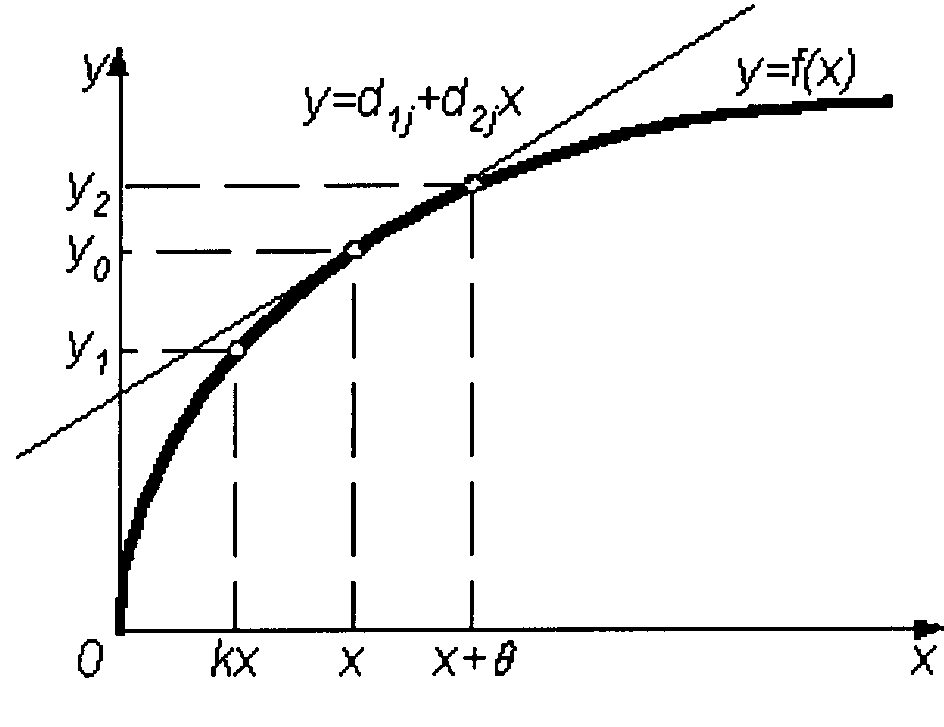
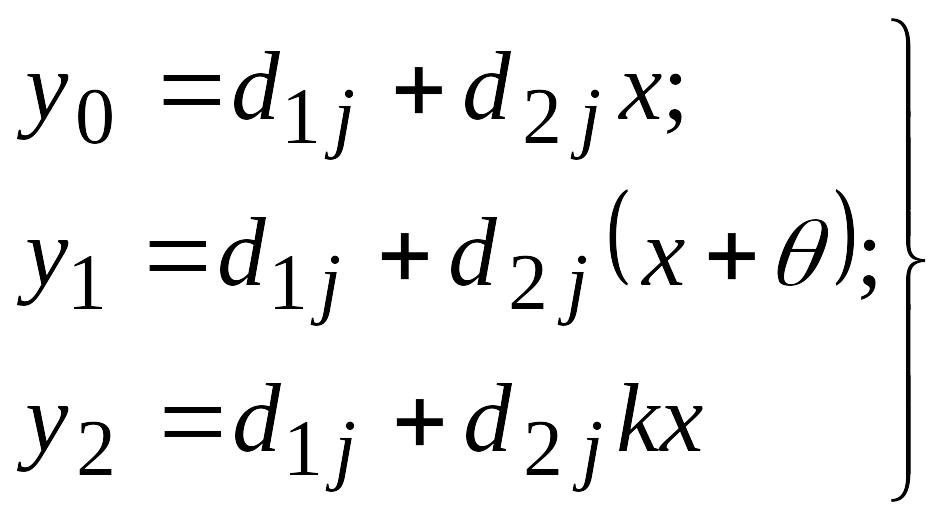 (8.27)
(8.27)
и запоминаются вычислительным устройством. Решив эту систему относительно x по формуле
![]() (8.28)
(8.28)
вычислительное устройство выдает результат измерения. Границы j -го интервала аппроксимации соответствуют значениям kx и x+q. При изменении x соответствующее смещение границ означает переход на новый интервал аппроксимации. Таким образом, для реализации метода необходимо получение точных и стабильных q и k. Технически это легче достижимо для q, чем для k.
Эта проблема может быть решена некоторым изменением структуры (рис. 8.10) и алгоритма работы корректирующей системы соединением входа БМТ с выходом БАТ и введением одного дополнительного такта измерения.
|
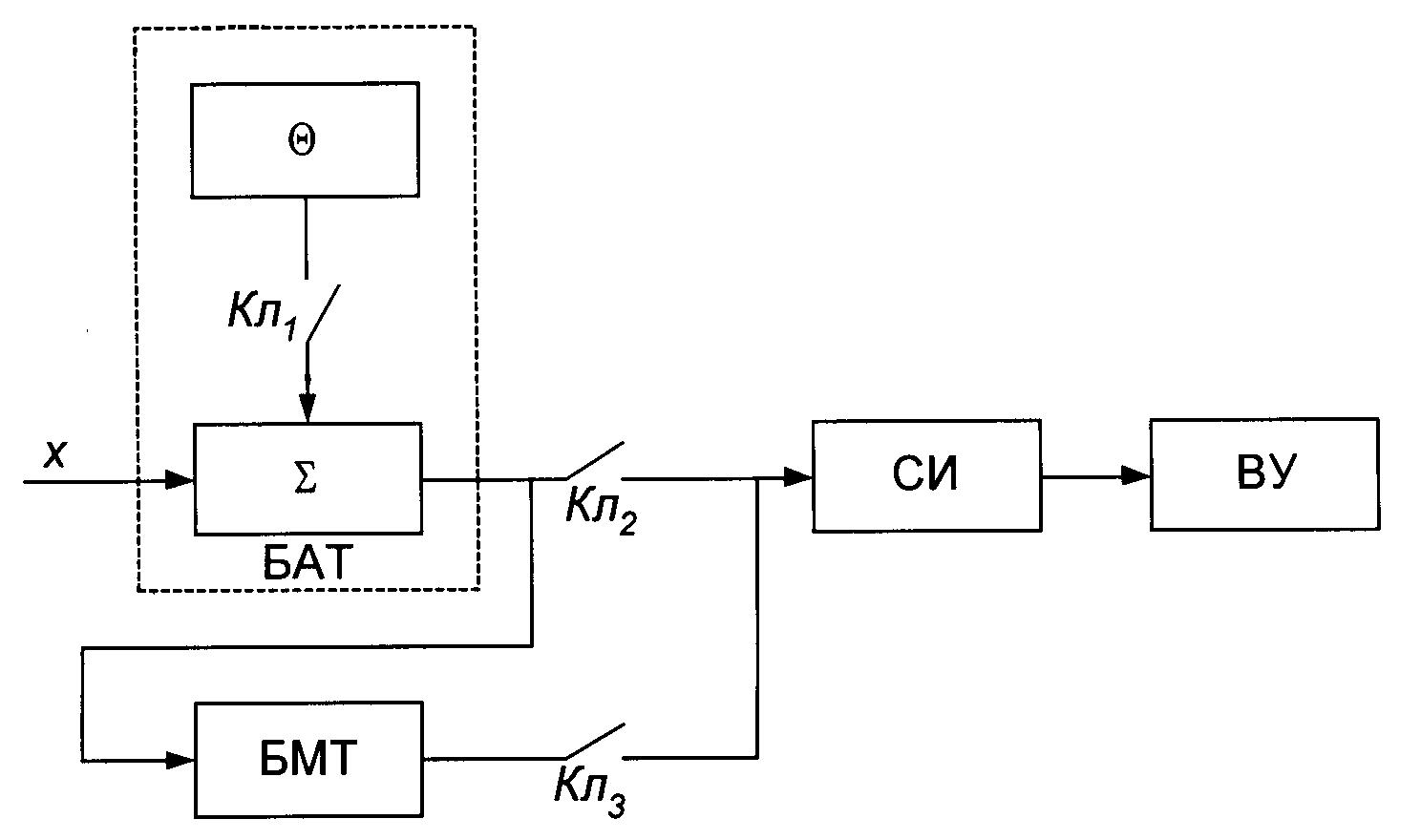
Рис. 8.10. Система коррекции погрешностей тестовым методом
Первые три такта измерений проходят так же, как при использовании системы, изображенной на рис. 8.8. В четвертом такте ключ Кл2 разомкнут, а ключи Кл1 и Кл3 замкнуты. При этом входной величиной СИ является тест k(x+q), а результат измерения
![]() .
(8.29)
.
(8.29)
Тогда в результате совместного решения (8.27) и (8.29) получается
![]() ,
(8.30)
,
(8.30)
и, следовательно, коэффициент k не влияет на результат измерения.
По сравнению с методом образцовых сигналов, тестовые методы обладают существенными преимуществами. Это отсутствие необходимости в процессе измерения отключать измеряемую величину от входа СИ и использовать большое количество образцовых величин, даже при существенной нелинейности функции преобразования средства измерения.