

Лабораторная работа 2
.docФедеральное агентство по образованию РФ
Санкт-Петербургский государственный электротехнический университет
Кафедра МО ЭВМ
Отчет по лабораторной работе № 2
Дискретный фильтр Калмана
Преподаватель: Смирнов Н.А.
Студент гр. 4351 Кузьменко А.
Санкт-Петербург
2007
Лабораторная работа № 2.
Дискретный фильтр Калмана.
Задание 1
Исследовать
работу линейного ФК при точно заданных
параметрах модели динамической системы
![]() (2.1). Для этого проанализировать полученные
в результате машинного эксперимента
зависимости от времени k
следующих переменных:
(2.1). Для этого проанализировать полученные
в результате машинного эксперимента
зависимости от времени k
следующих переменных:
а) элементов матрицы коэффициентов усиления фильтра Kk(1) и Kk(2);
б) фактических ошибок оценивания ek(1) и ek(2);
в)
элементов матрицы Pk,
характеризующей теоретически
предсказываемые ошибки оценивания:
диагональных элементов Pk(1,
1) и Pk(2,
2) коэффициента корреляции
![]() ;
;
г)
ошибок измерений vk
=
zk
– Yk(1)
(сравнить их с фактическими ошибками
фильтрации ek(1)
=
![]() -
Yk(1)
из п. б.
-
Yk(1)
из п. б.
Сравнить варианты: при Qk = 0 и Qk 0.
Параметры:
m=10, f=2, kf=0.01,
помеха vk равномерная, σk =2
количество измерений – 100
истинные значения Y=0, Y´=20,
начальные оценки Y=-3.04, Y´=13.2
ковариационная
матрица P0=![]()
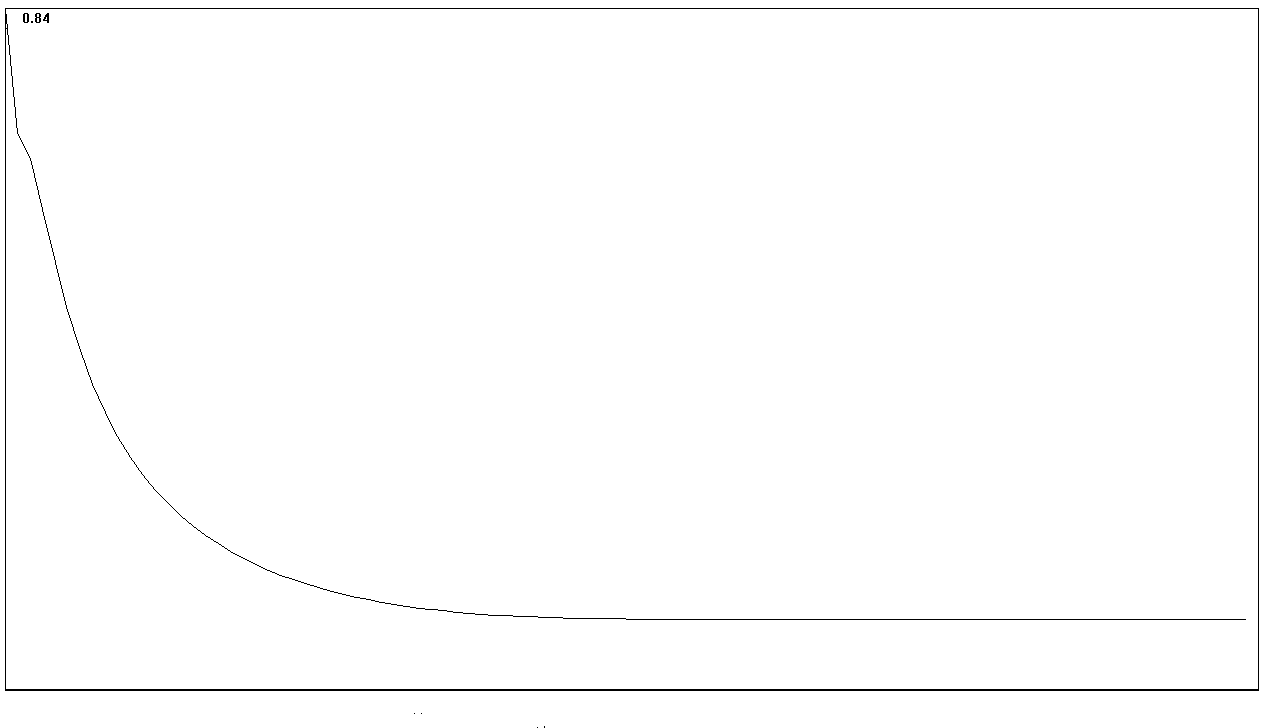
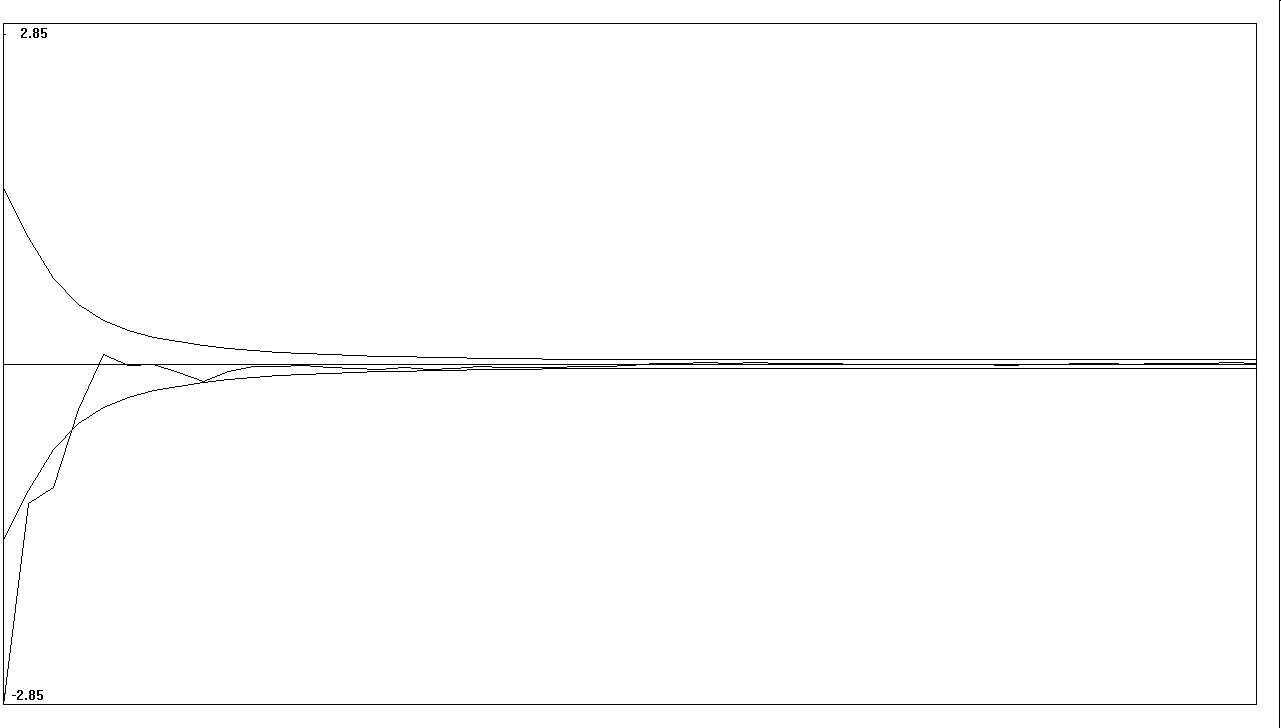
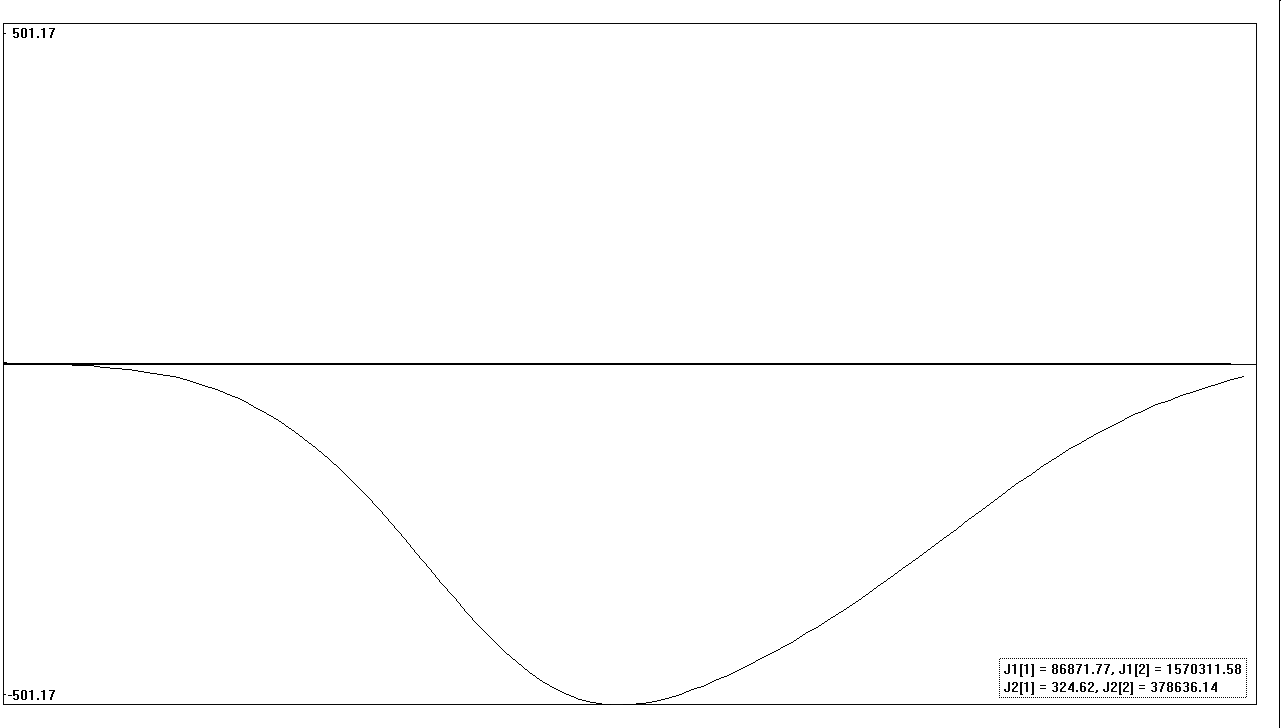
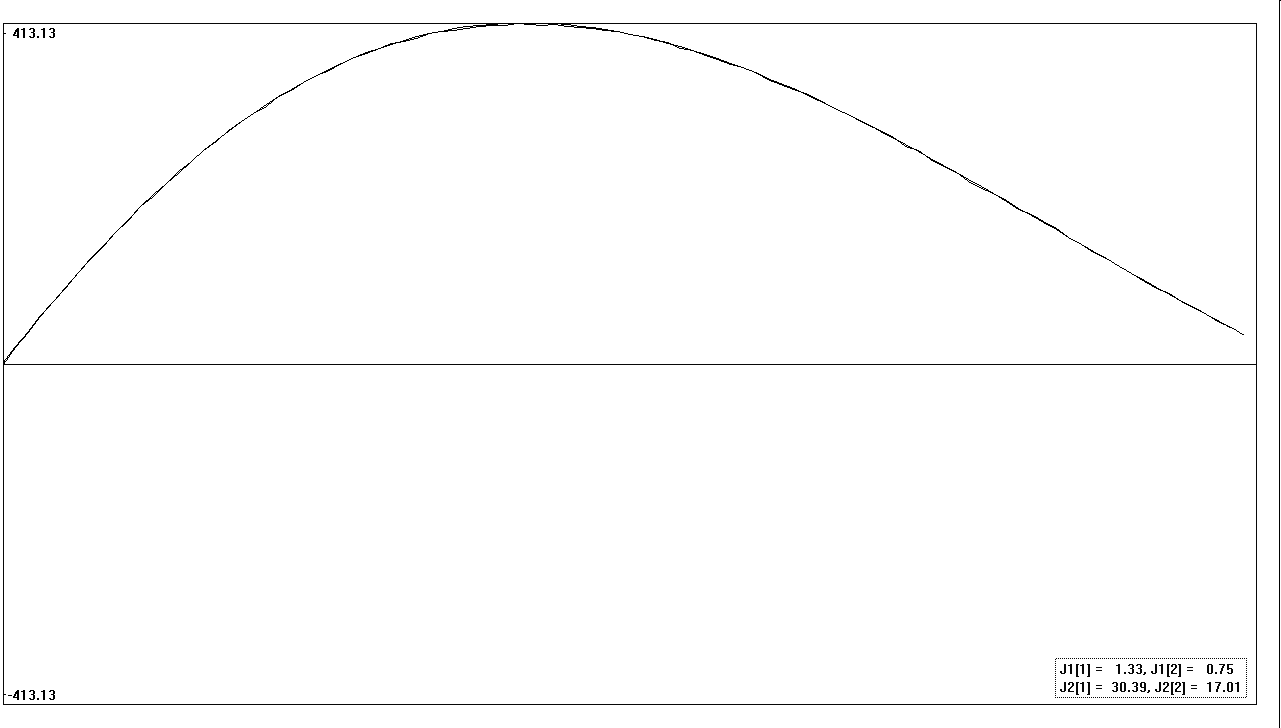
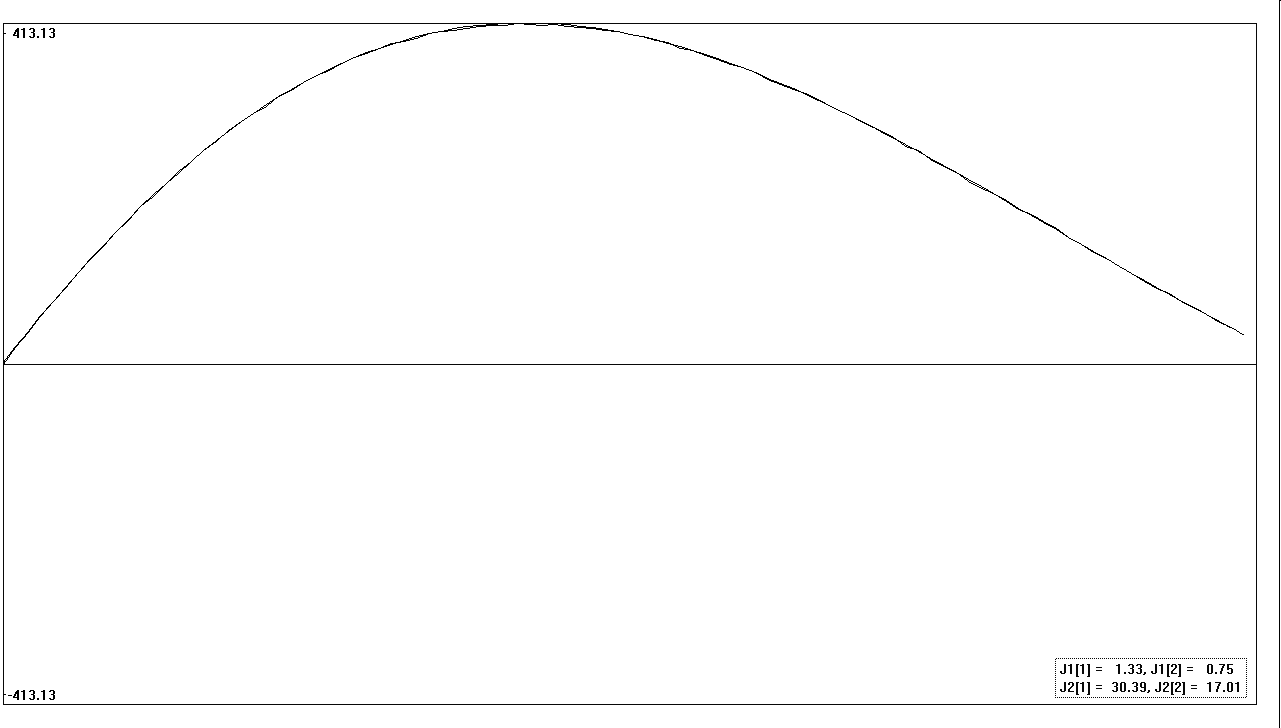
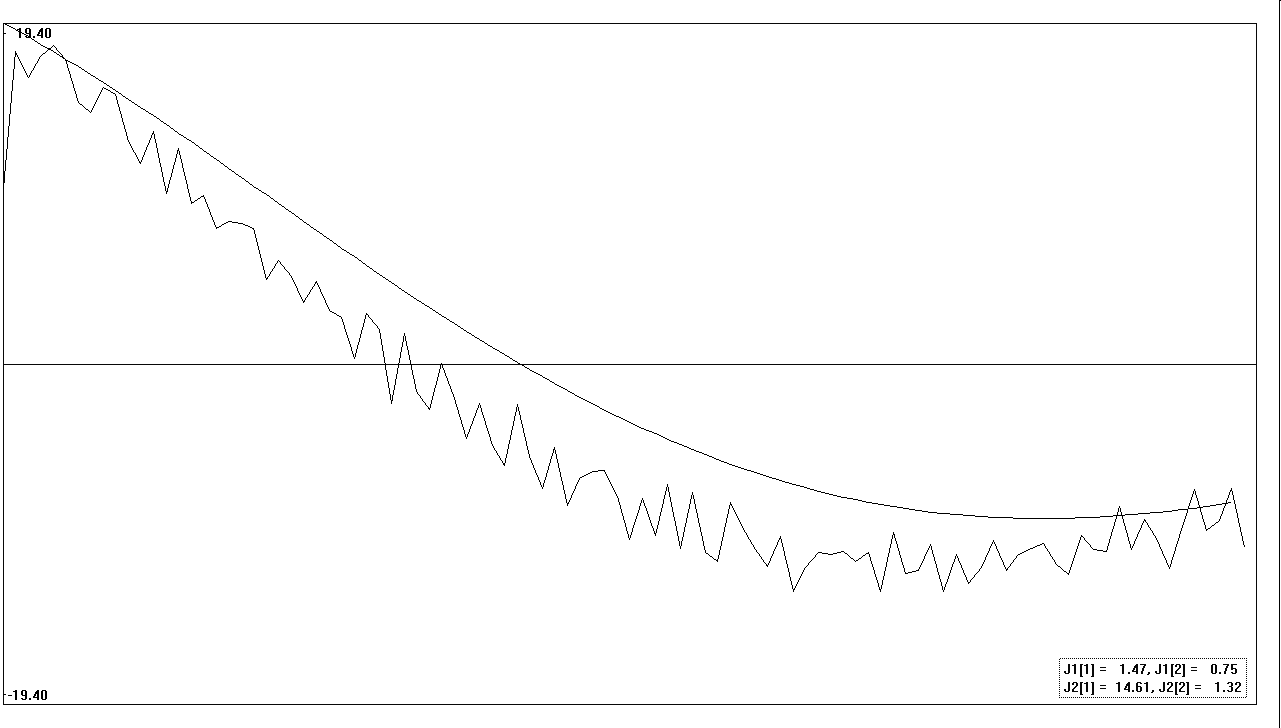
Результаты: (Qf=0)
![]()
-
Kk(1)
Kk(2)

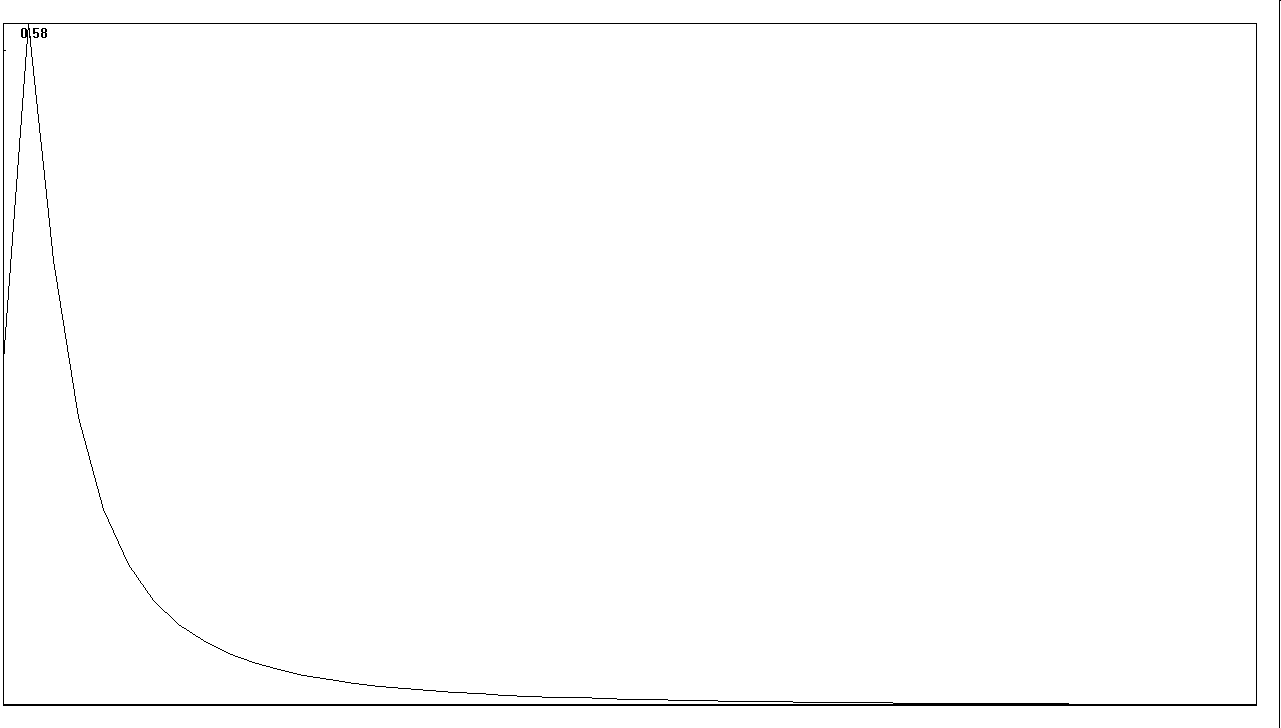
ошибки фильтрации по Y
ошибки фильтрации по Y´


ошибка наблюдения

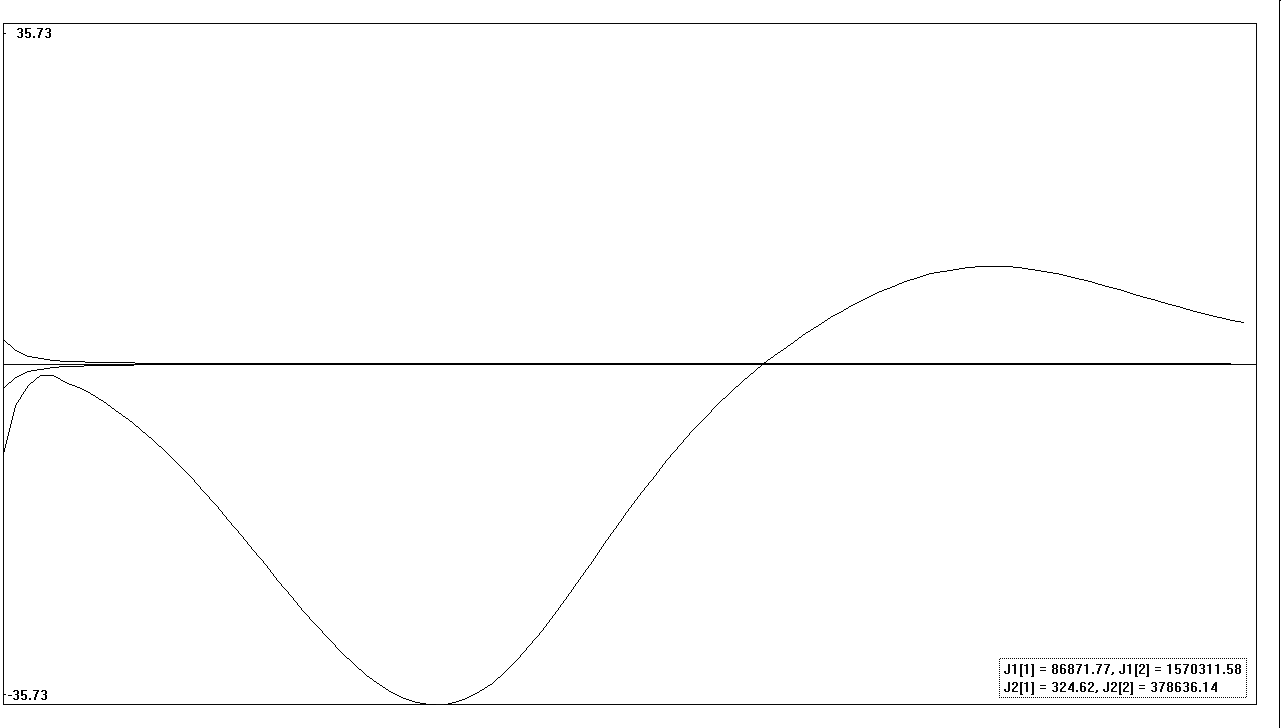
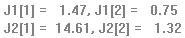
Результаты: (Qf=0.1)
![]()
-
Kk(1)
Kk(2)
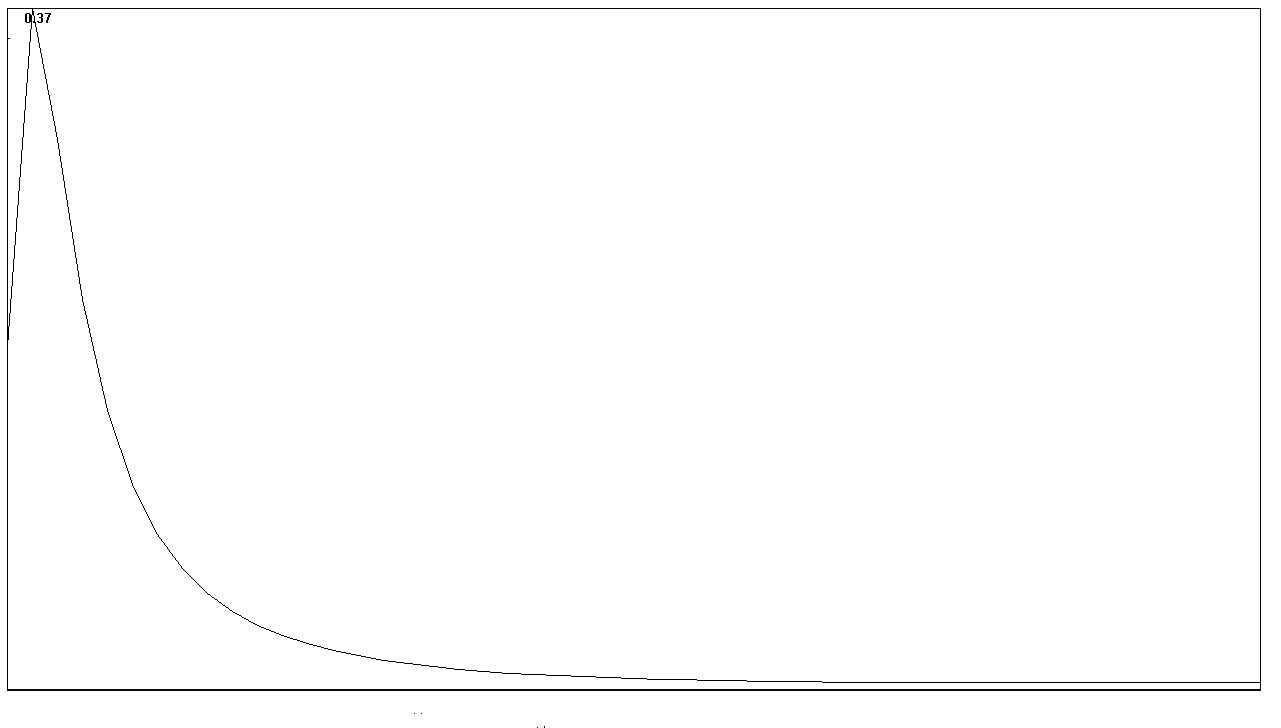
ошибки фильтрации по Y
ошибки фильтрации по Y´
ошибка наблюдения
Задание 2
Исследовать
влияние на оценки
![]() неопределенности в задании значений
некоторых из параметров модели движения.
Для этого при обработке задать возмущенные
значения одного из этих параметров.
Сравнить фактические ошибки фильтрации
ek(1)
и ek(2)
с теоретически предсказанными.
неопределенности в задании значений
некоторых из параметров модели движения.
Для этого при обработке задать возмущенные
значения одного из этих параметров.
Сравнить фактические ошибки фильтрации
ek(1)
и ek(2)
с теоретически предсказанными.
Параметры:
m=10, f=2, kf=0.01, Qf=0
начальные оценки m=10, f=2.5, kf=0.01
помеха vk равномерная, σk =2
количество измерений – 100
истинные значения Y=0, Y´=20,
начальные оценки Y=-3.04, Y´=13.2
ковариационная
матрица P0=![]()
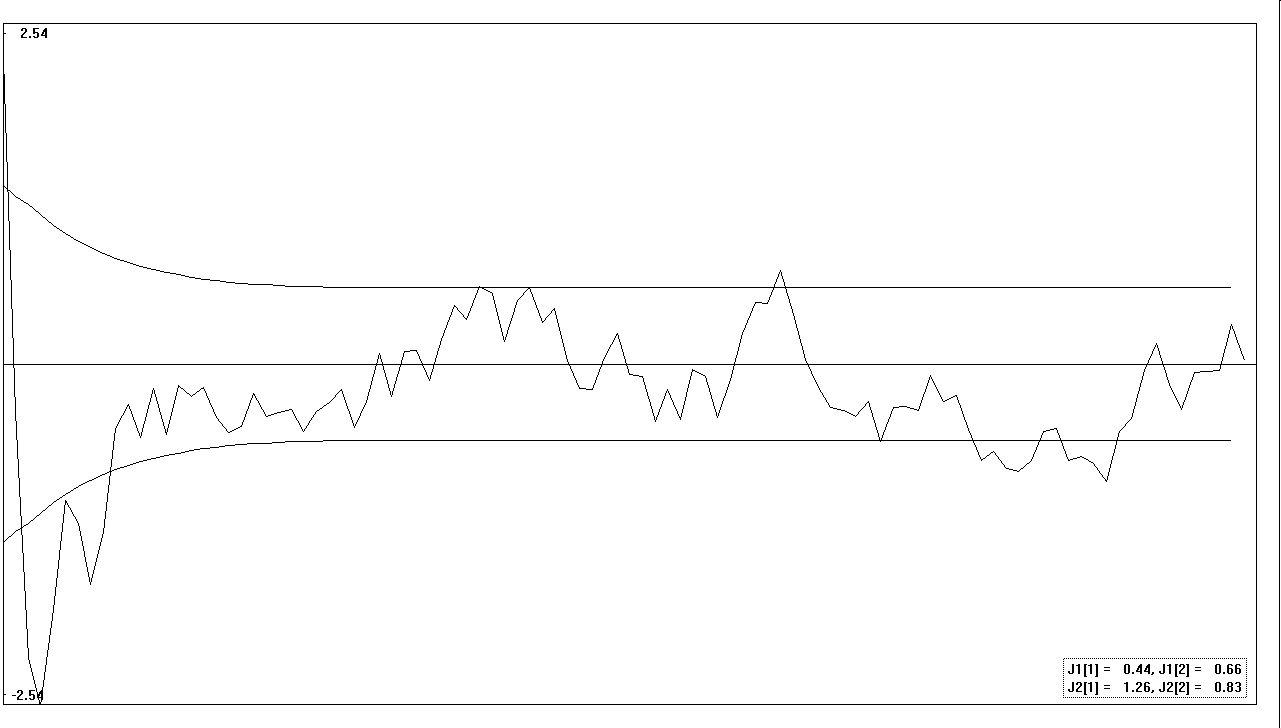
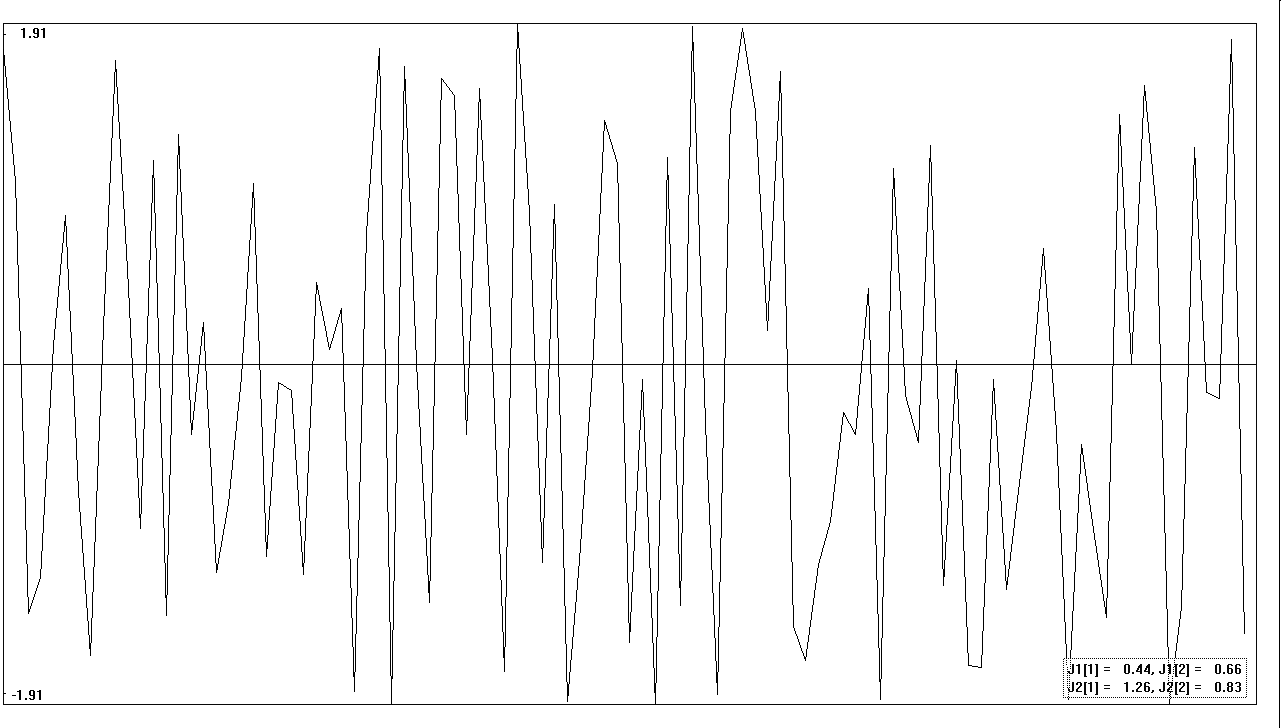
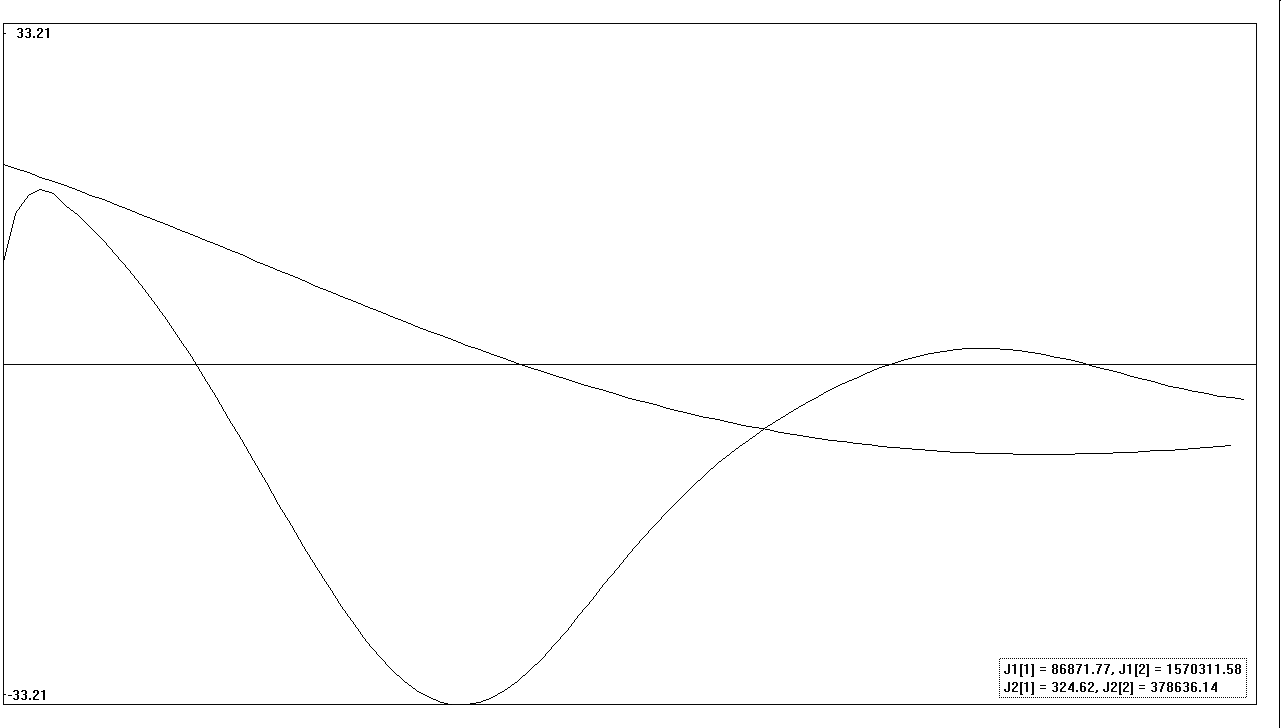
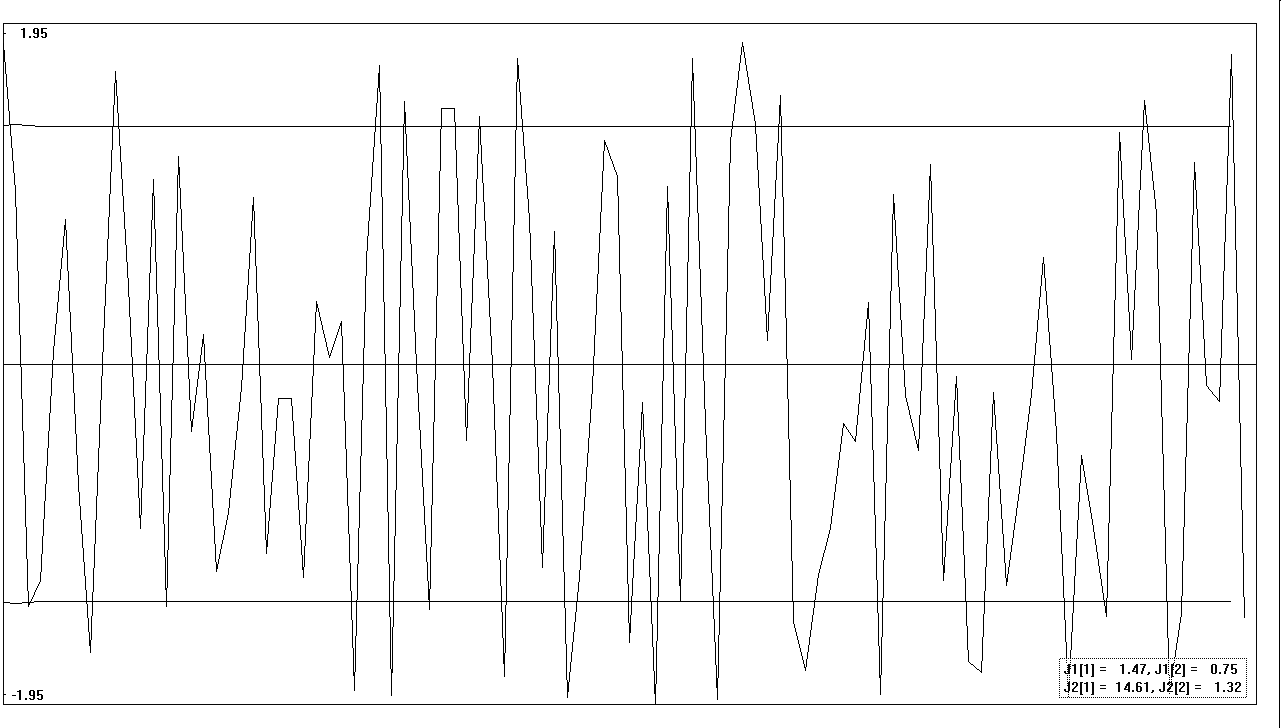
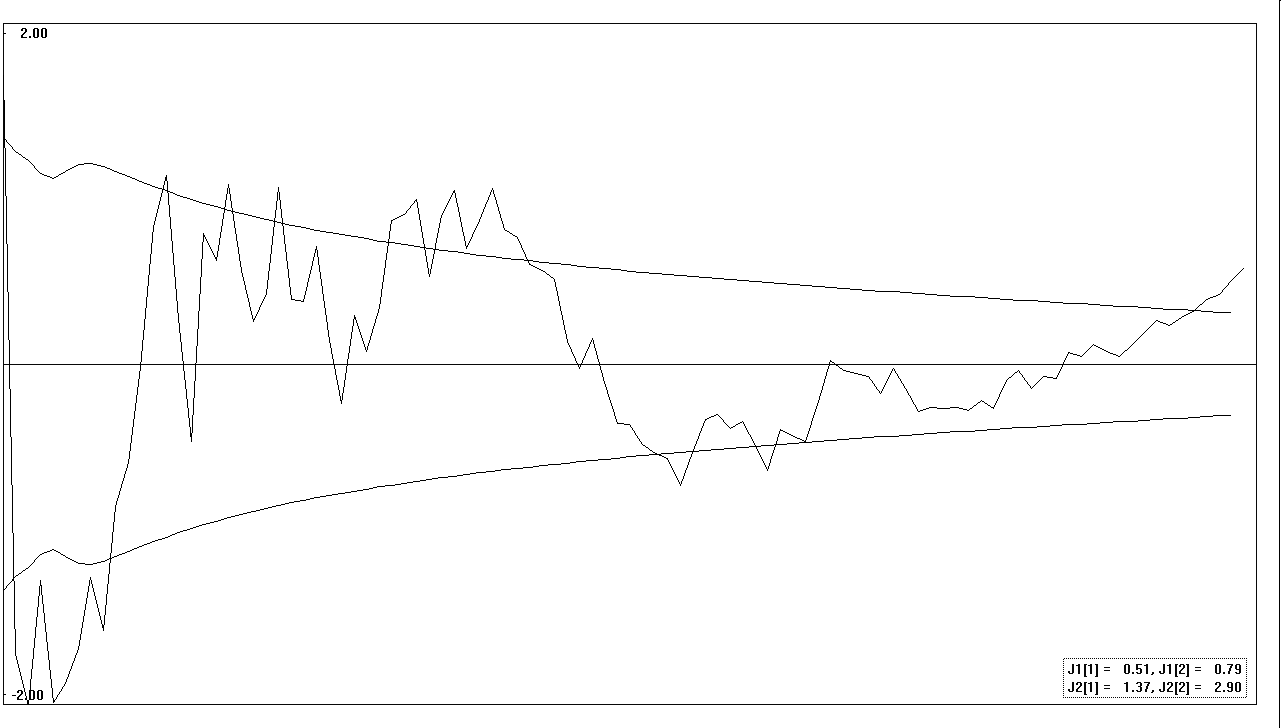
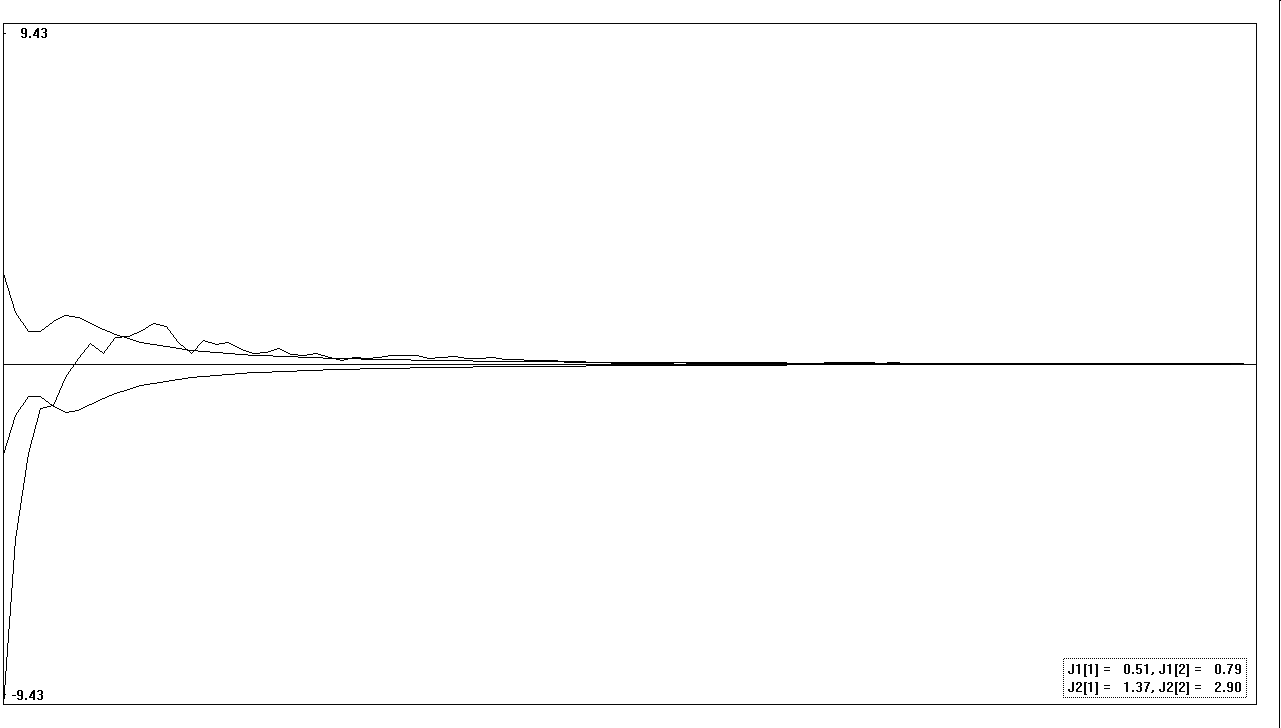
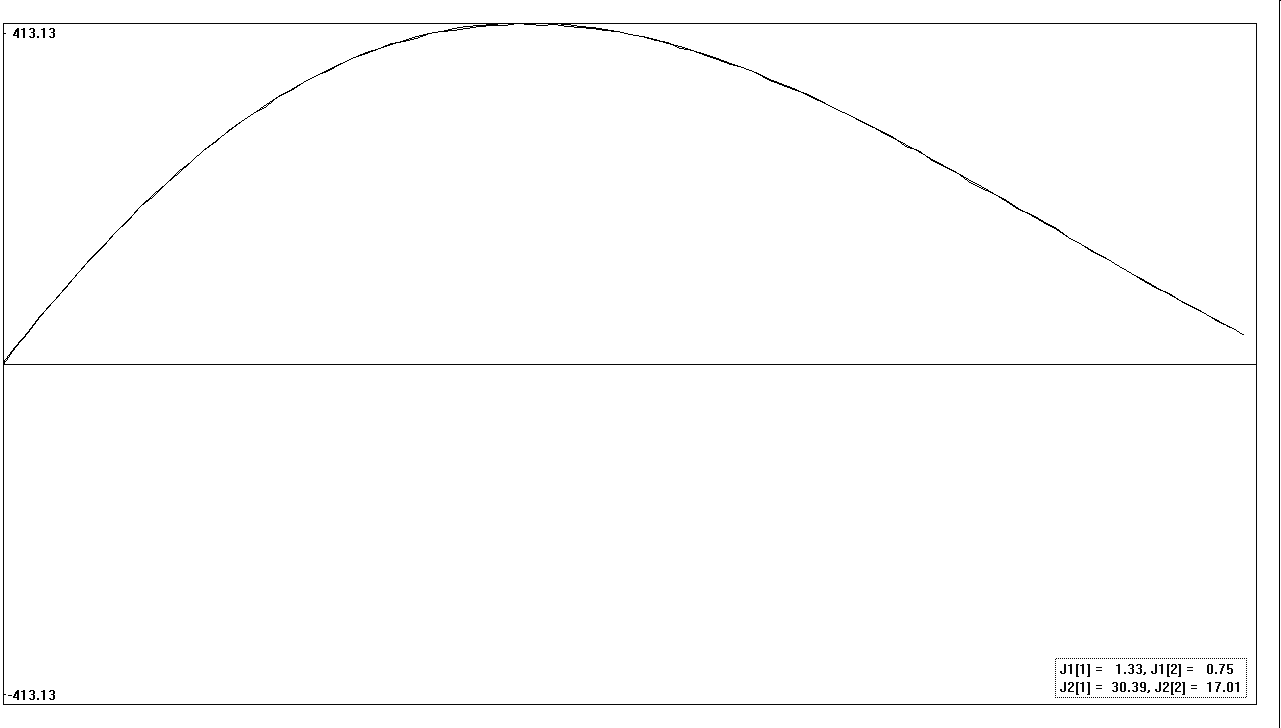
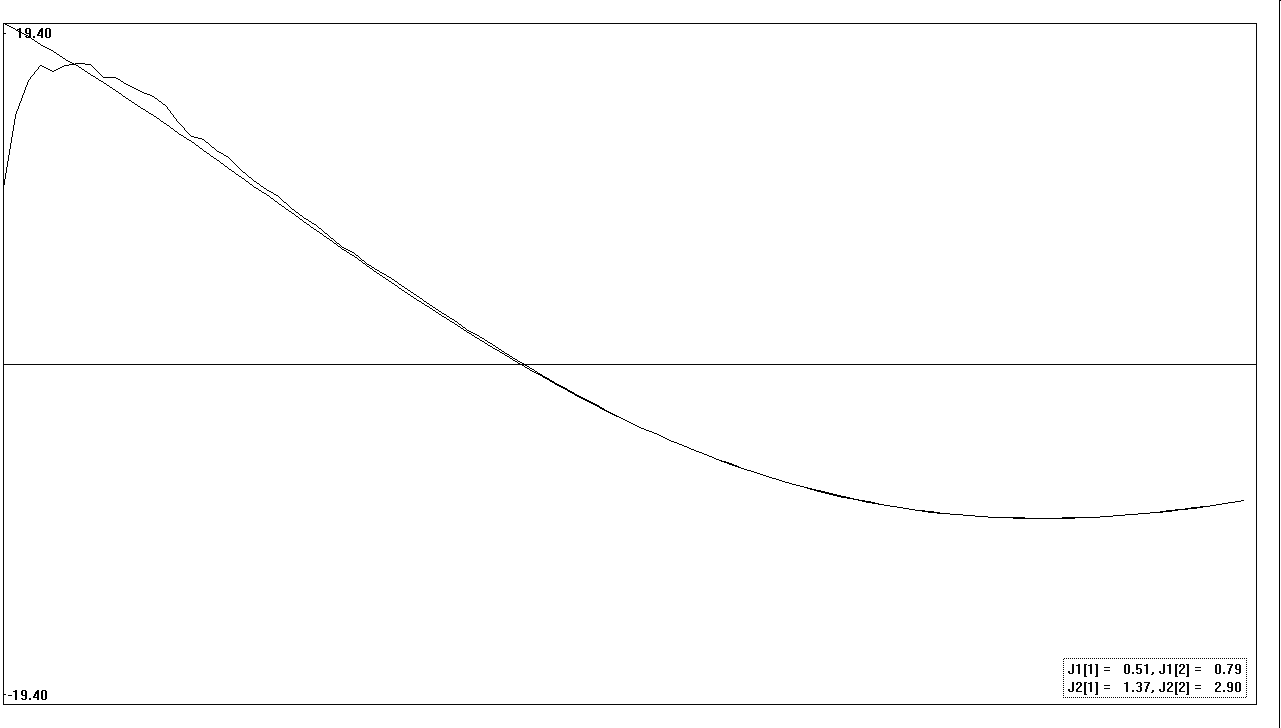
Результаты:
![]()
-
ошибки фильтрации по Y
ошибки фильтрации по Y´

Задание 3
Исследовать эффективность модификации стандартного ФК со "старением" данных в случае возмущений параметров динамической системы, использованных в задании 2. Сравнить результаты, полученные в данном задании и задании 2, в зависимости от значений параметра "старения" s. Использовать 3-4 значения этого параметра s = 1,1 – 1,4. При анализе результатов использовать показатели качества работы фильтра J1() и J2() из (2.17), (2.18).
Параметры:
m=10, f=2, kf=0.01, Qf=0
начальные оценки m=10, f=2.5, kf=0.01
помеха vk равномерная, σk =2
количество измерений – 100
истинные значения Y=0, Y´=20,
начальные оценки Y=-3.04, Y´=13.2
ковариационная
матрица P0=![]()
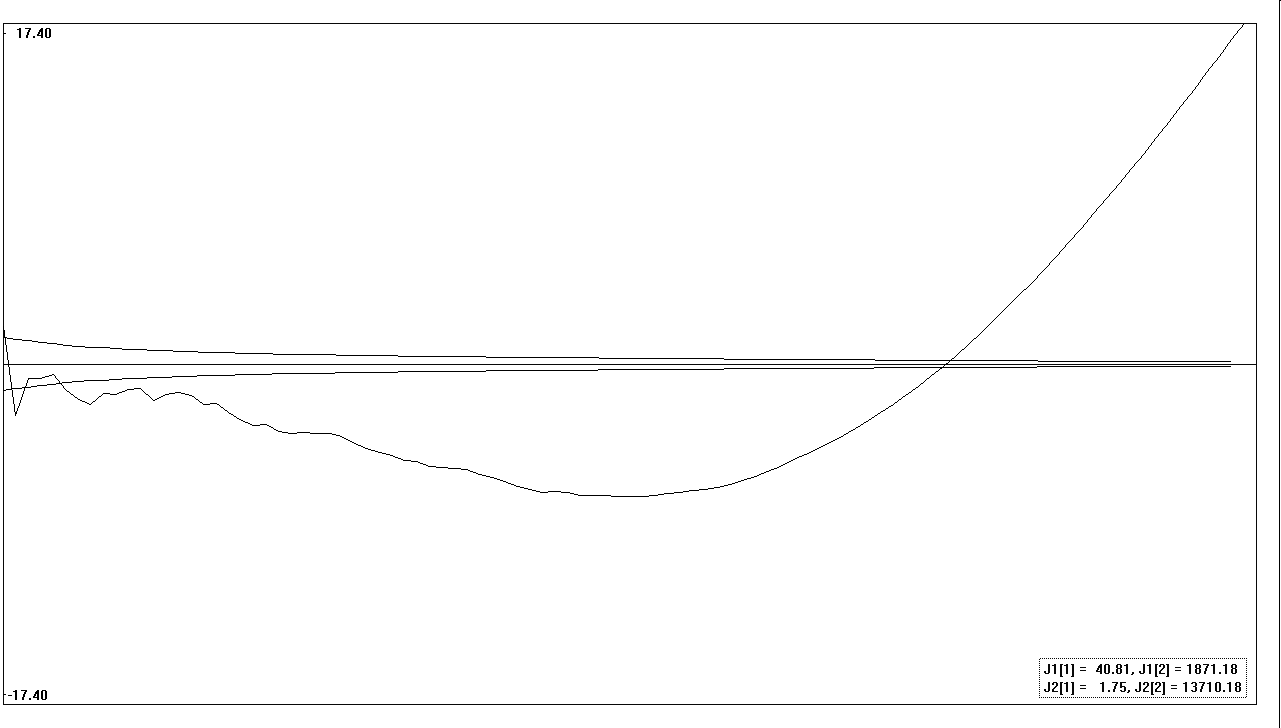
-
s
J1() и J2()
1.1

1.2

1.3
1.4

Видно, что фильтр Калмана со старением эффективен при неопределенности в задании значений параметров модели движения только при правильно подобранном коэффициенте старения.
Задание 4
При неточно заданном значении одного из параметров, m, f или kf, динамической системы сравнить результаты работы стандартного ФК, модифицированного ФК со старением данных и расширенного ФК; использовать несколько значений параметра старения данных, а также несколько значений начальной оценки неизвестного параметра и дисперсии этой оценки в расширенном ФК.
Параметры:
m=10, f=2, kf=0.01, Qf=0
начальные оценки m=10, f=2, kf=0.1
помеха vk равномерная, σk =2
количество измерений – 100
истинные значения Y=0, Y´=20,
начальные оценки Y=-3.04, Y´=13.2
ковариационная
матрица P0=![]()
-
Фильтр Калмана:

ошибки фильтрации по Y
ошибки фильтрации по Y´
состояние Y
состояние Y´

Фильтр Калмана со старением (s=3)

ошибки фильтрации по Y
ошибки фильтрации по Y´

состояние Y
состояние Y´

-
Фильтр Калмана со старением (s=8)
ошибки фильтрации по Y
ошибки фильтрации по Y´
состояние Y
состояние Y´
-
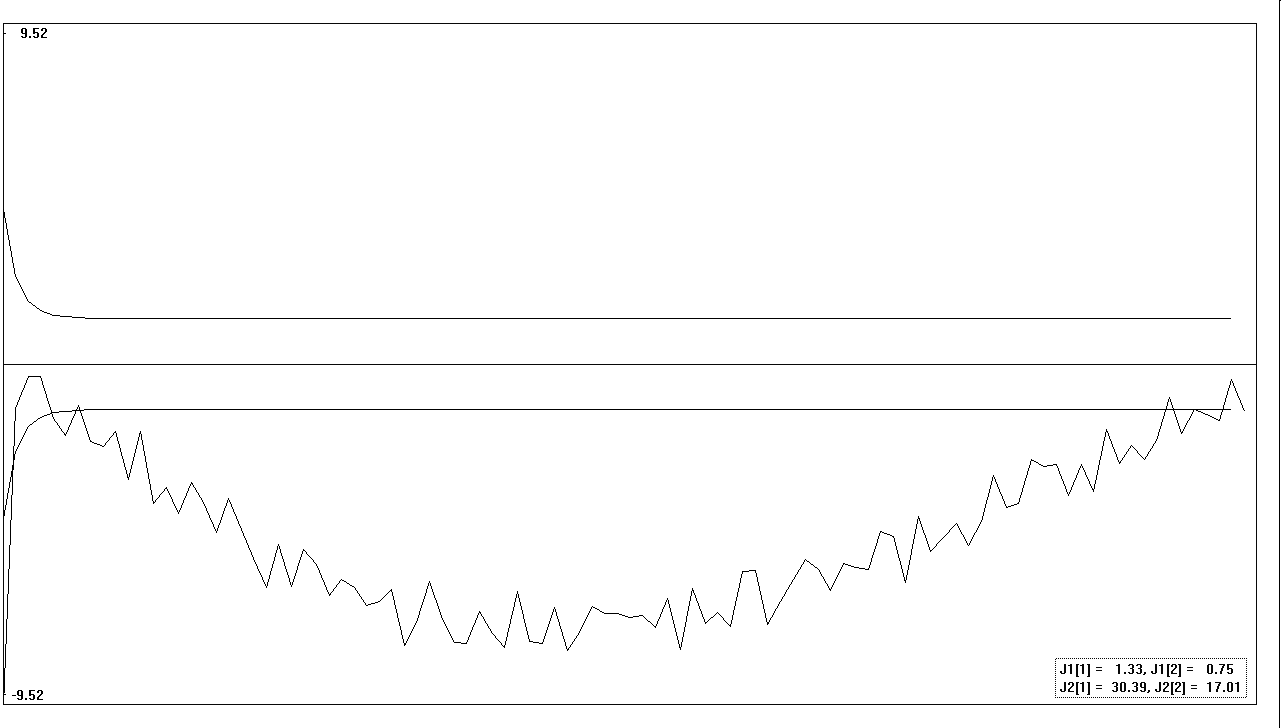
Расширенный фильтр Калмана:

ошибки фильтрации по Y
ошибки фильтрации по Y´
состояние Y
состояние Y´
Видно, что при неточном задании одного из параметров динамической системы фильтр Калмана со старением эффективнее простого фильтра Калмана, а расширенный фильтр эффективнее фильтра со старением.