

6 Опис системи чпу
Прилад числового програмного керування WL4M призначено для керування складними верстатами і обробляючими центрами.
По виду обробки геометричної інформації пристрій є – контурно-позиційним з вільним програмуванням алгоритмів.
Кількість керуючих осей – до восьми.
Прилад в залежності від програмного забезпечення забезпечує – одночасне керування з лінійною інтерполяцією – по чотирьох осях; з круговою інтерполяцією – в одній координатній площині і з лінійною – по перпендикулярній к ній осі координат.
Кількість цифро-аналогових перетворювачів для зв’язку з перетворювачами переміщень – до восьми.
Пристрій забезпечує управління наступним приводом подач для верстатів обладнаних фотоелектричними перетворювачами лінійних переміщень Мінілід – 300 з нормуючими перетворювачами ЕХЕ – 601 або ЕХЕ – 802, або аналогічними по дискретності і каналами зв’язку, параметрами живлення.
Пристрій в залежності від варіанта виконання забезпечує ввід аналогових сигналів адаптивного керування з наступними параметрами:
-кількість сигналів – 2;
-діапазон вхідних напруг від -10 до +10 В;
-дискретність – не більше 10мВ;
-похибка перетворення в діапазоні від 0 до 400 мВ не більше 2 дискрет;
-похибка перетворення в діапазоні від 400мВ до 16В не більше 5% від ---значення при температурі повітря (293 ± 1)К.
Пристрій має оперативний запам’ятовуючий пристрій де зберігаються програми, корекції на розмір, підпрограм ємністю від 18 до 48 Кбайт із них от 2 до 8 Кбайт – оперативний запам’ятовуючий пристрій, який зберігає інформацію після вимкнення живлення. Час зберігання інформації не менше 120 годин.
Програмне забезпечення ЧПУ WL4M призначено для управління верстатами свердлильної, фрезерної і розточувальної групи з різною організацією електроавтоматики верстата.
ПО дозволяє здійснювати:
- Розміри у дюймові / метричні - Програмування контуру - Абсолютна / инкрементальное програмування - Програмування діаметр / радіуса осі X - Безпосереднє програмування розмірів зображення - Арифметичні та тригонометричні функції - Програмування меню - Виклик підпрограми - Функція пропуску - Перехід діагонального сполучення / радіуса - Вибір площини - Система координат деталі
- Прискорений рух(G0, RTLION,RTLOF);
- Вибрати тип кругової інтерполяцію ;
- повернення на траєкторію;
- Вибір робочої плошини;
- завдання величини переміщень в абсолютних і відносних координатах;
- завдання величини подач в міліметрах в хвилину, швидкості головного руху –в оборотах в хвилину;
- корекція робочих подач на 0,20,40,50,60,70,80,90,100,110,120%;
- корекцію швидкості головного руху на 40,50,60,70,80,90,100,110,120,130,140%;
7 Склад системи чпу
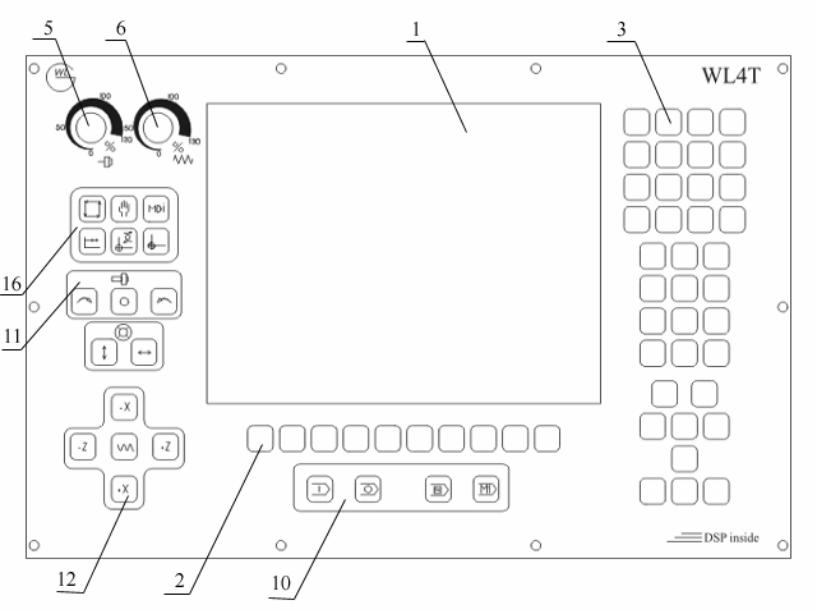
Рисунок 7.1 – Передня панель управління ЧПК WL4T
Екран пристрою відображення інформації;
Динамічна функціональна клавіатура;
Статична клавіатура;
Регулятор плавної ручної зміни швидкості прискореної подачі;
Регулятор плавної ручної зміни швидкості обертання шпинделя;
Регулятор плавної ручної зміни швидкості робочої подачі;
Кнопки управління затиском інструменту;
Кнопки управління системою охолодження інструменту;
Кнопка аварійного вимкнення верстата;
Кнопки управління програмою;
Кнопки управління шпинделем;
Кнопки управління подачею;
Перемикач величини подачі;
Перемикач величини дискрети переміщення;
Перемикач вибору осі подачі;
Перемикач режимів роботи.
Верстат складається з двох основних блоків:
Електрошафа, в якій знаходиться ЧПУ, блоків входів-виходів, блок реле, блок автоматів, блок пускачів, блоку живлення приводів ЧПУ, приводи осьові, головного приводу.
З пульту оператора, гідроапаратури, безконтактних датчиків, датчиків інструментальної зміни діапазонів, датчиків гідро гальмування, датчиків орієнтації шпинделя, датчиків руху зворотного зв’язку. Осьових двигунів і двигунів головного руху, додаткових двигунів, вентилятору шпинделя, насосу гідростанції, насосу змащення, направляючих. На пульті оператора знаходяться всі основні кнопки керування верстатом, є кнопки які вбудовані на WL4T, і додаткові кнопки що знаходяться на додатковому пульті. Всі сигнали з пульту оператора, поступають на входи ЧПУ, який знаходиться в електрошафі.
За допомогою математичної програми та алгоритмів керування ЧПУ дає сигнали на плату виходів.
З блоку виходів, сигнали потрапляють на блок реле, який в свою чергу дає команди для роботи гідроапаратури, блоку пускачів, а також керування приводами.
Гідроапаратура при роботі дає сигнали на датчики (всі види, окрім датчиків зворотного зв’язку і датчиків руху) які в свою чергу дають сигнали на входи ЧПУ.
Блок пускачів вимикає силові трансформатори, які живлять приводи і керують додатковими двигунами. Контроль блоку пускачів здійснюється за допомогою сигналу, який потрапляє на входи ЧПУ, живлення блоку пускачів здіймаються за допомогою автоматів, які також контролюються сигналами входів.
Основні двигуни керуються приводами, контроль двигунів здійснюється за допомогою датчиків зворотного зв’язку поступає на входи.
Регулювання швидкості руху приводних двигунів здійснюється за допомогою сигналу завданого з виходів ЧПУ, які приходять на основі привода. Всі данні які відбуваються в ЧПУ, рух шпинделя, основних двигунів, відображаються на моніторі пульту оператора.