

5.1.2Реализация источника питания инвертора в виде выпрямителя
На первый взгляд создание источника питания инвертора не представляет сложностей. Однако при проектировании источника питания необходимо учитывать, что запасённая энергия двигателя должна где то приниматься.
Когда в качестве источника применялась батарея, отдаваемая двигателем энергия шла на зарядку батареи (батарея – аккумулятор принимает ток любого знака). При использовании полупроводникового выпрямителя ток может протекать только одного направления. Поэтому при перекачке энергии от двигателя через инвертор к выпрямителю происходит накопление энергии в конденсаторе за счёт увеличения напряжения на нём. Такое решение показано на схеме модели рисунок 5.17.
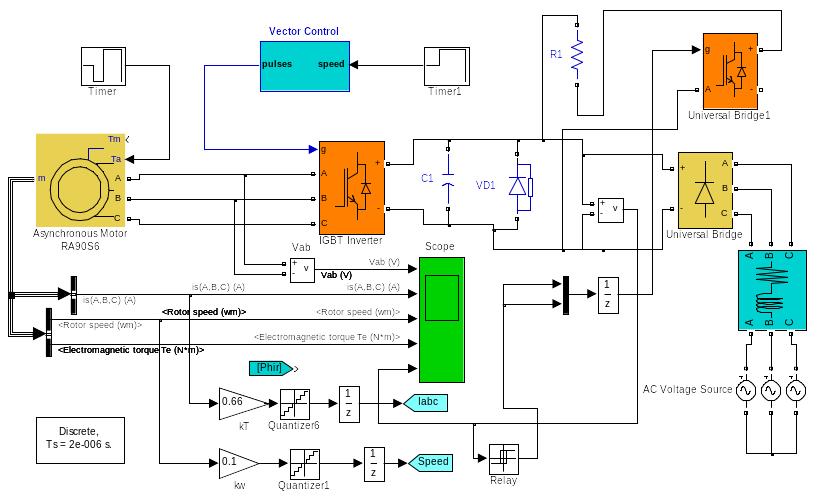
Рисунок 5.304 – Электропривод с источником питания инвертора (Fig5_17)
При увеличении напряжения на конденсаторе С1 более 600В с помощью схемы управления включается ключ (Universal Bridge1) и подключает параллельно конденсатору так называемый «тормозной» резистор. По существу избыточная энергия двигателя гасится на резисторе. При небольшой мощности привода (до 20…50кВт) такое решение можно принять, при больших мощностях необходимо искать другие решения.
Неуправляемый полупроводниковый усилитель Universal Bridge получает питание от сетевого трёхфазного напряжения и обеспечивает напряжение порядка 550В. Фильтрация выпрямленного напряжения осуществляется конденсатором С1. Роль конденсатора двойная: во-первых, уменьшить пульсации напряжения выпрямителя; во-вторых, снизить внутреннее сопротивление источника при импульсной нагрузке.

Рисунок 5.305 – Окно настройки блока Universal Bridge1
Реализация коммутации «тормозного» резистора R1 выполнена на однофазном преобразователе Universal Bridge1, у которого используется только верхний транзистор (ключ). Настройка блока показана на рисунке 5.18.
Управление выполнено от блока Relay. Так как в однофазном преобразователе Universal Bridge1 два транзистора, то на выходе блока Relay включаем мультиплексор на два входа – оба транзистора управляются одним сигналом. Настройка блока Relay показана на рисунке 5.19.
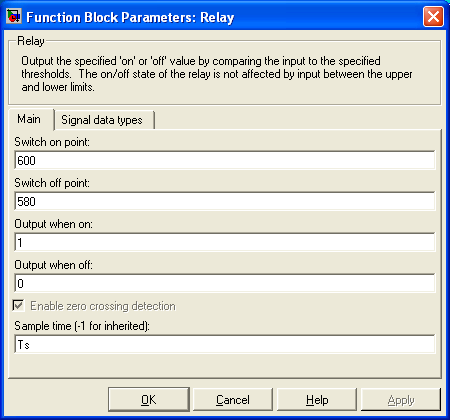
Рисунок 5.306 – Окно настройки блока Relay
Включение ключа с резистором R1 производится при напряжении на выходе выпрямителя (на конденсаторе С1) 600В и более, выключение – при снижении напряжения до 580В и ниже.
До производства моделирования сделаем замечание, что наиболее напряжённый режим работы привода генераторный (рекуперативный). Такой режим возможен при активном моменте сопротивления и в этом режиме решающую роль выполняет «тормозной» резистор R1. Поэтому нагрузку на двигатель будем подавать по входу Та.
И, последнее уточнение: сопротивление «тормозного» резистора R1 принято 5Ом, ёмкость конденсатора С1 взята 300 мкФ.
Выполним моделирование пуска – реверса двигателя на малую частоту вращения, нагружать двигатель будем активным моментом и назначать знак момента сопротивления таким образом, что бы двигатель в основном работал в генераторном режиме. Программы управления частотой вращения и активным моментом во времени занесены в таймеры Timer1 и Timer и представлены на рисунке 5.20.
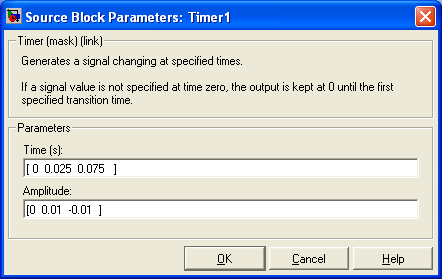
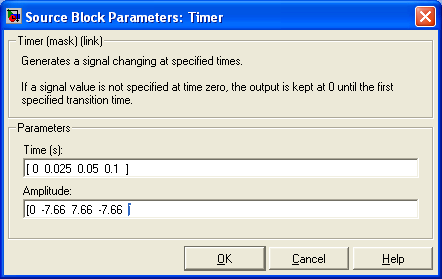
Рисунок 5.307 – Временные программы управления частотой вращения и активным моментом сопротивления
На рисунке 5.21 представлены результаты моделирования работы электропривода с векторным управлением, укомплектованного полностью необходимым оборудованием.
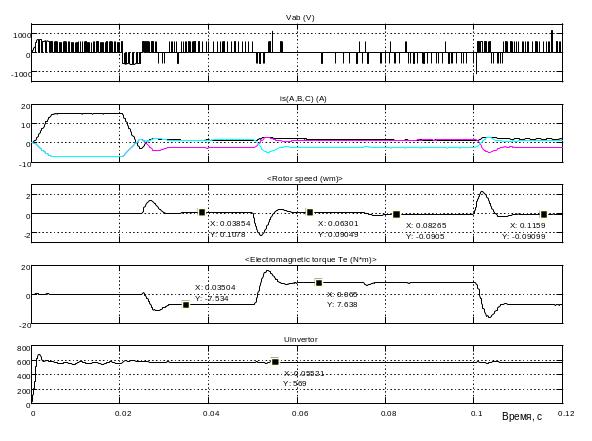
Рисунок 5.308 – Результаты моделирования электропривода с векторным управлением при работе на активную нагрузку (малая скорость)
Первый вывод, который необходимо сделать первым, это принципиально другой характер реакции привода на управления и возмущения. Перерегулирование стало чётко выраженным фактом и является следствием действия активного момента. Однако задание по частоте вращения исполняется достаточно аккуратно, хотя из-за больших перерегулирований четкость отработки заданной частоты вращения в этом масштабе несколько размыта.
И, третье, напряжение источника питания не превышает 600В. за исключением момента включения привода в сеть.
На рисунке 5.22 продемонстрирована работа электропривода с активным моментом нагрузки на средней частоте вращения.
Привод выполняет все задания. Напряжение источника питания инвертора всё настойчивее приближается к 600В, чаще срабатывает «тормозной» резистор. Это свидетельствует о том, что двигатель на большей скорости имеет больший запас энергии, которую при определённых условиях (перерегулирование, работа в генераторном режиме, реверсирование) старается отдать в цепь инвертора.
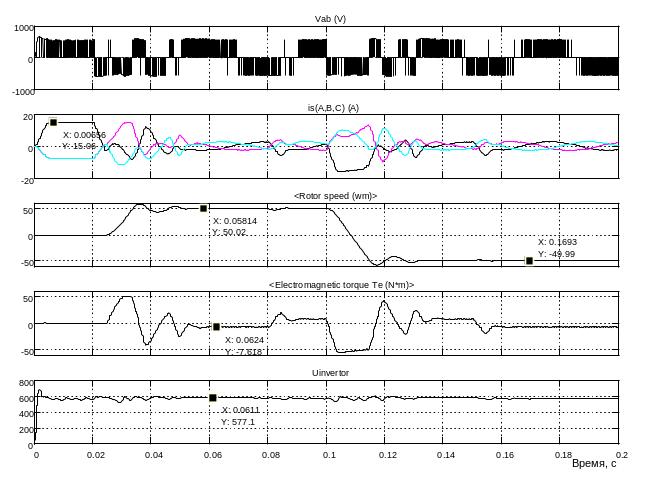
Рисунок 5.309 - Результаты моделирования электропривода с векторным управлением при работе на активную нагрузку (средняя скорость)
На рисунке 5.23 показаны результаты моделирования работы привода на большой скорости. Задания выполняются, но не достаточно чётко. Однако конкретных претензий нет – частота вращения соответствует заданному значению, после возмущения по нагрузке возвращается на заданное значение.
Напряжение питания инвертора вплотную приблизилось к 600В. Всё большая часть энергии возвращается двигателем, работающим с активной нагрузкой.
В заключении отметим, что разработанный электропривод уверенно работает в диапазоне 1000 с различным характером нагрузки, при воздействии нагрузки номинального значения астатические свойства системы не нарушаются во всём диапазоне частоты вращения.
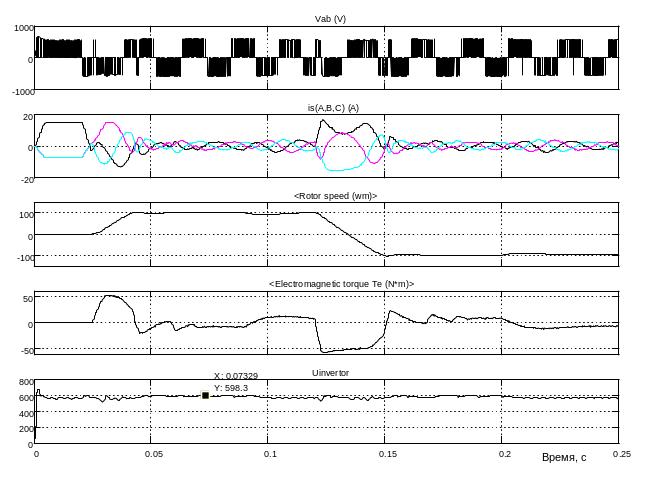
Рисунок 5.310 - Результаты моделирования электропривода с векторным управлением при работе на активную нагрузку (большая скорость)