

4.3Оптимизация и имитационное исследование в Simulink контура тока
4.3.1Расчёт параметров регулятора тока при идеальном источнике тока
Расчётная схема контура тока показана на рисунке 4.6.

Рисунок 4.224 – Структурная схема контура тока
Контур содержит идеальный инвертор с передаточной функцией:
![]() ,
,
где
![]() ,
– коэффициент усиления инвертора;
,
– коэффициент усиления инвертора;
![]() – модуль пространственного вектора
фазного напряжения статора;
– модуль пространственного вектора
фазного напряжения статора;
![]() – максимальное напряжение управления
инвертором;
– максимальное напряжение управления
инвертором;
![]() – постоянная времени инвертора;
– постоянная времени инвертора;
![]() – несущая частота (коммутации) инвертора
(см. таблицу 4.1).
– несущая частота (коммутации) инвертора
(см. таблицу 4.1).
![]() (4.0)
(4.0)
Нагрузка инвертора представлена
эквивалентным сопротивлением статорной
обмотки
![]() и эквивалентной постоянной времени
и эквивалентной постоянной времени
![]() (см. таблицу 4.3).
(см. таблицу 4.3).
Передаточная функция нагрузки (цепи обмотки статора):
![]() .
(4.0)
.
(4.0)
Передаточная функция фильтра Filtr1:
![]() ,
(4.0)
,
(4.0)
где
![]() – постоянная времени фильтра, которая
соответствует периоду опроса данных о
реальном токе 40мкс.
– постоянная времени фильтра, которая
соответствует периоду опроса данных о
реальном токе 40мкс.
Коэффициент обратной связи по току был вычислен ранее и равен:
![]() .
(4.0)
.
(4.0)

Рисунок 4.225 – Схема модели контура тока (Fig4_7)
Расчёт параметров регулятора тока (рисунок 4.7) произведём по модульному оптимуму [8]. Все необходимые условия выполнены.
При одной большой постоянной времени рекомендуется применение пропорционально-интегрального регулятора с передаточной функцией вида:
![]() ,
(4.0)
,
(4.0)
где
![]() ;
;
![]() – большая постоянная времени, равная
времени изодрома
– большая постоянная времени, равная
времени изодрома
![]() ;
;
![]() – эквивалентная малая постоянная
времени контура тока;
– эквивалентная малая постоянная
времени контура тока;
![]() – коэффициент оптимизации.
– коэффициент оптимизации.
Таким образом, рассчитав все параметры контура тока (4.15…4.19), разработаем модель в Simulink и представим её на рисунке 4.7.
Модель реализована на элементах библиотеки Simulink, за исключением регулятора тока Current PI Controller, схема модели которого открывается по команде Look Under Mask и показана на рисунке 4.8.

Рисунок 4.226 – Схема модели ПИ-регулятора
Параметры регулятора вносятся через диалоговое окно, открывающееся при двойном щелчке по изображению регулятора (рисунок 4.9).

Рисунок 4.227 – Окно ввода параметров ПИ-регулятора
В строку Proportional
заносится коэффициент усиления регулятора
![]() ,
в строку Izodrom – время
изодрома
,
коэффициент усиления интегратора
,
в строку Izodrom – время
изодрома
,
коэффициент усиления интегратора
![]() вычисляется при инициализации регулятора.
Limit Out,
Limit Int
– параметры, устанавливающие уровень
ограничения выходного напряжения и
интегратора регулятора. Параметры
введены заведомо большого значения,
что бы исключить насыщения и обеспечить
работу регулятора в линейном режиме.
вычисляется при инициализации регулятора.
Limit Out,
Limit Int
– параметры, устанавливающие уровень
ограничения выходного напряжения и
интегратора регулятора. Параметры
введены заведомо большого значения,
что бы исключить насыщения и обеспечить
работу регулятора в линейном режиме.
Блок Current задаёт ток
преобразователя (инвертора). Ток задаётся
в виде напряжения. Для установленных
параметров задающему напряжению в ±10В
соответствует ток статора по осям
±15,13А=10,7![]() .
.
Проведём исследование спроектированного контура в линейном режиме без ограничения выходных напряжений регулятора. Для этого вызывается файл Fig4_7 и осуществляется моделирование при задающем сигнале 10 В (рисунок 4.10).

Рисунок 4.228 – Оптимизированный переходный процесс в контуре тока
С целью упрощения процедуры обработки полученных результатов моделирования можно представить переходный процесс в машинных единицах (вольтах). Тогда схема эксперимента принимает вид, показанный на рисунке 4.11.
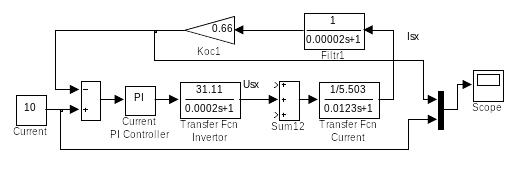
Рисунок 4.229 – Видоизменённая схема исследования контура тока
Результаты моделирования в машинных единицах (В) представлены на рисунке 4.12.

Рисунок 4.230 – Переходный процесс в контуре тока в (В)
Имеющиеся в Simulink инструменты обработки диаграмм позволяют с наименьшими затратами времени и с большой наглядностью получить нужные результаты. Например, по диаграмме на рисунке 4.12 после использования инструмента определения координаты нужной точки, располагаемой на расчётной кривой, следует, что перерегулирование составляет 4,4% при теоретическом значении [8] 4,3%. Строго говоря, на этот результат влияет фильтр. Этот результат свидетельствует о том, что расчёт параметров регулятора произведён правильно. Какие-то детальные исследования соответствия полученных результатов рекомендациям Кесслера не имеют смысла, если Вы убедились в правильности разработанного контура. Необходимые данные, если они требуются для дальнейшего проектирования, можно, например, брать из таблицы 2.2, приведённой в [8].