

5. Принцип возможных перемещений
Здесь ставится новая задача: подобрать вес колеса А таким, чтобы механизм, изображенный на рис.11, находился в состоянии равновесия. Воспользуемся для этого принципом возможных перемещений. Укажем на расчетной схеме (см. рис.11) возможные перемещения всех твердых тех, придавая малые приращения соответствующим координатам. Определяя работу активных сил на возможном перемещении и приравнивая ее нулю, найдем
![]() (29)
(29)
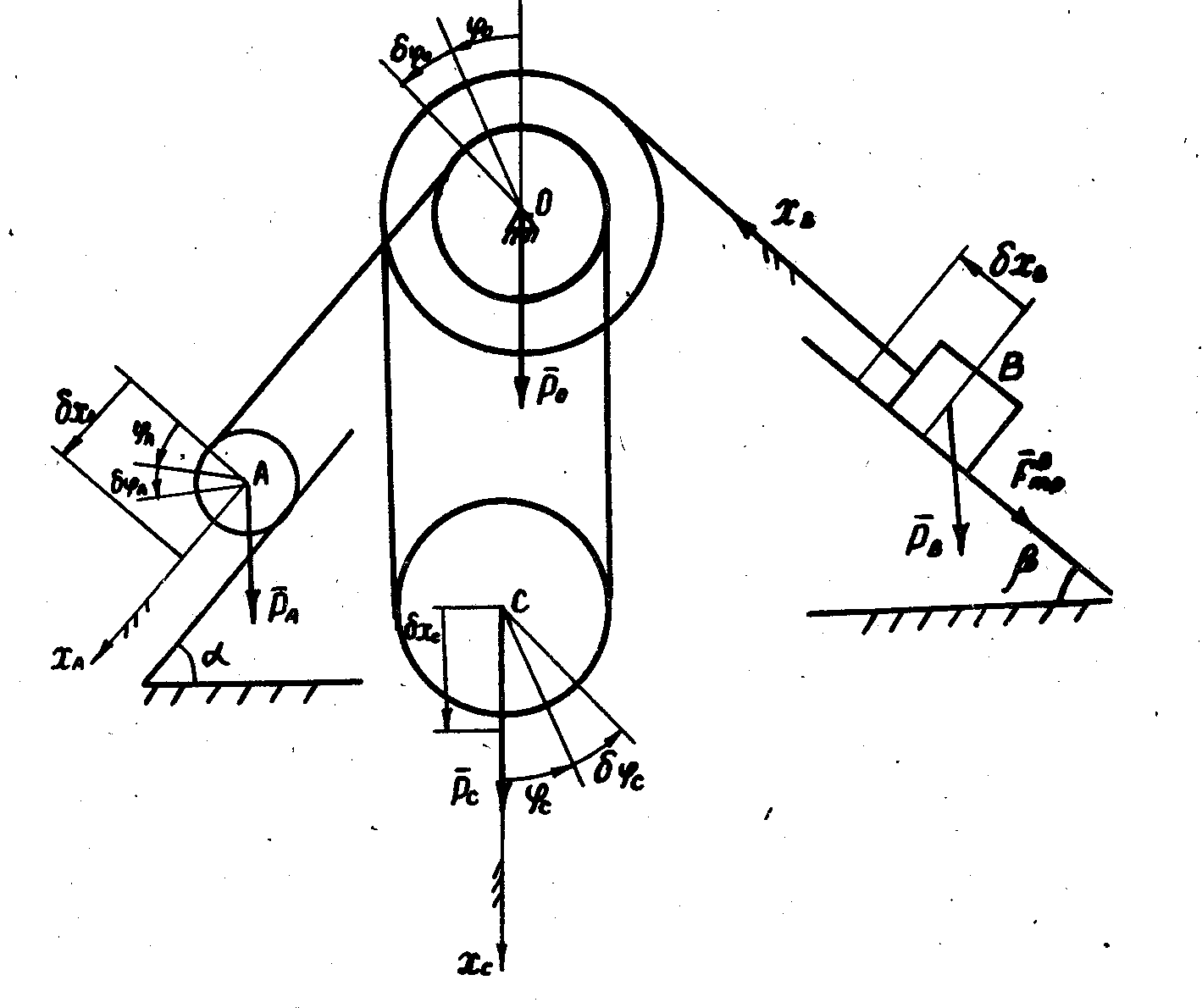
Рис.11. Силовая схема равновесия механизма.
С помощью уравнений связей (см. таблицу) выразим приращения координат xс и xB через приращение координаты xA
 (30)
(30)
Подставляя (29) в (30), находим
![]() (31)
(31)
Так
как равенство (31) должно выполняться
для произвольного приращения
![]() ,
то
,
то
![]() ,
,
откуда искомый вес равен
![]()
6. Общее уравнение динамики
Составим силовую расчетную схему, указав на кинематической схеме механизма активные силы и силы инерции (рис.12), а также возможные перемещения его звеньев (так же как в разделе 3, система не разделяется на части). Записывая выражения для работы активных сил и сил инерции на возможных перемещениях звеньев механизма и приравнивая сумму этих работ к нулю, составим общее уравнение динамики:
![]() (32)
(32)
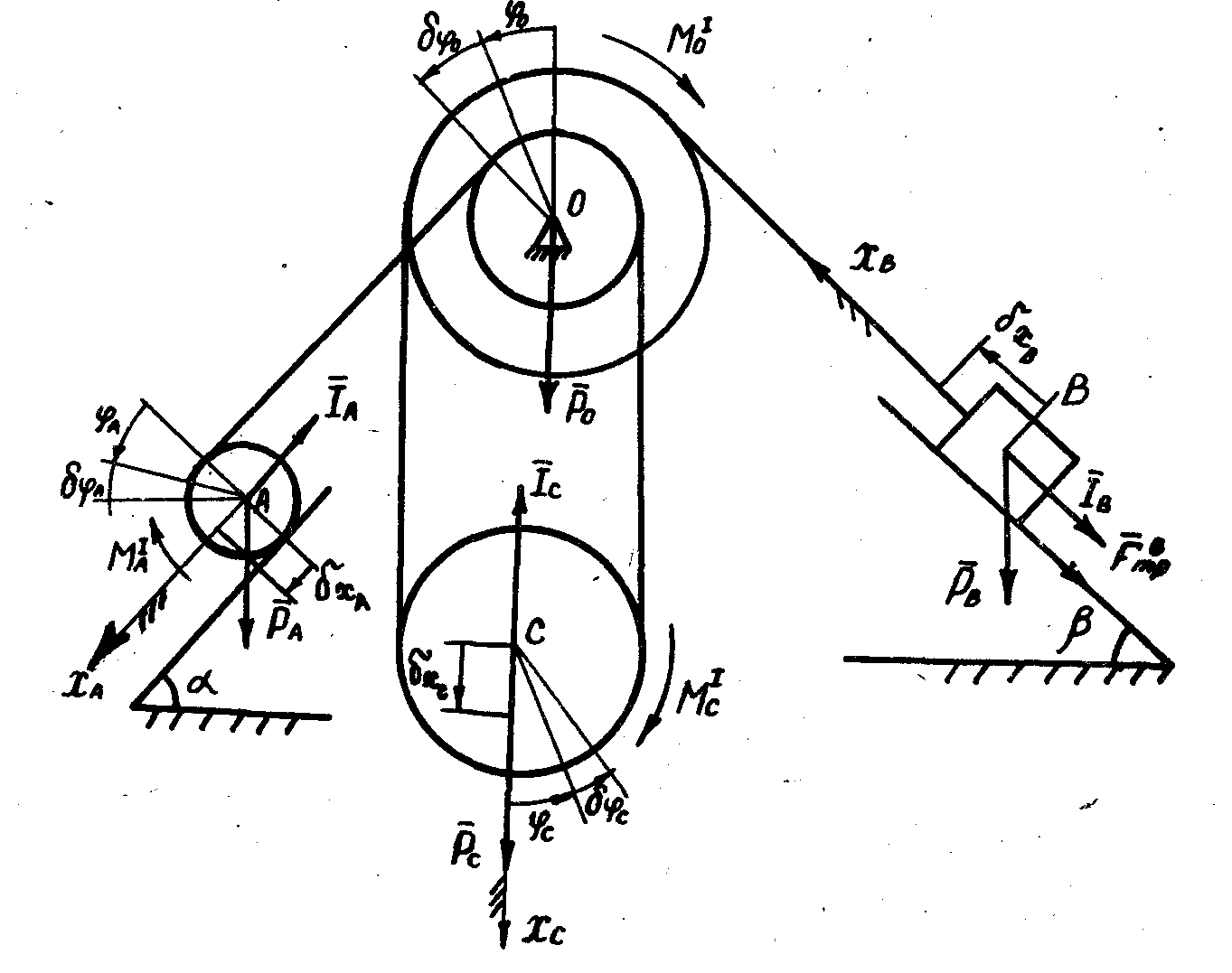
Рис.12. Силовая схема механизма для общего уравнения динамики
Силы инерции и моменты сил инерции, действующие на звенья механизма, определяются равенствами:
Подставляя эти выражения в уравнение (32), найдем
 (33)
(33)
Используя уравнения кинематических связей (см. таблицу), выразим характерные ускорения через ускорение центра колеса А, а приращения всех координат - через приращение координаты xA, тогда уравнение (33) приобретает вид
Ввиду того, что возможное перемещение может быть любым, выражение, стоящее в фигурных скобках, должно равняться нулю, тогда
(3.34)
Интегрирование дифференциального уравнения (34) для нахождения законов движения твердых тел уже было произведено в разделе 2.
7. Уравнение Лагранжа II рода.
Составляя силовую расчетную схему, укажем на кинематической схеме механизма только активные силы, действующие на его звенья, и отметим возможные перемещения всех твердых тел (рис.13). Эта схема отличается от схемы на рис.12 отсутствием сил инерции. Для описания движения данного механизма необходимо составить всего лишь одно уравнение Лагранжа II рода, так как механизм обладает одной степенью свободы. В качестве обобщающей координаты выбираем xA, тогда
![]() ,
(35)
,
(35)
где Т
- кинетическая энергия всего механизма;
![]() - обобщенная
скорость; Q
- обобщенная сила, соответствующая
обобщенной координате
- обобщенная
скорость; Q
- обобщенная сила, соответствующая
обобщенной координате
![]() .
.
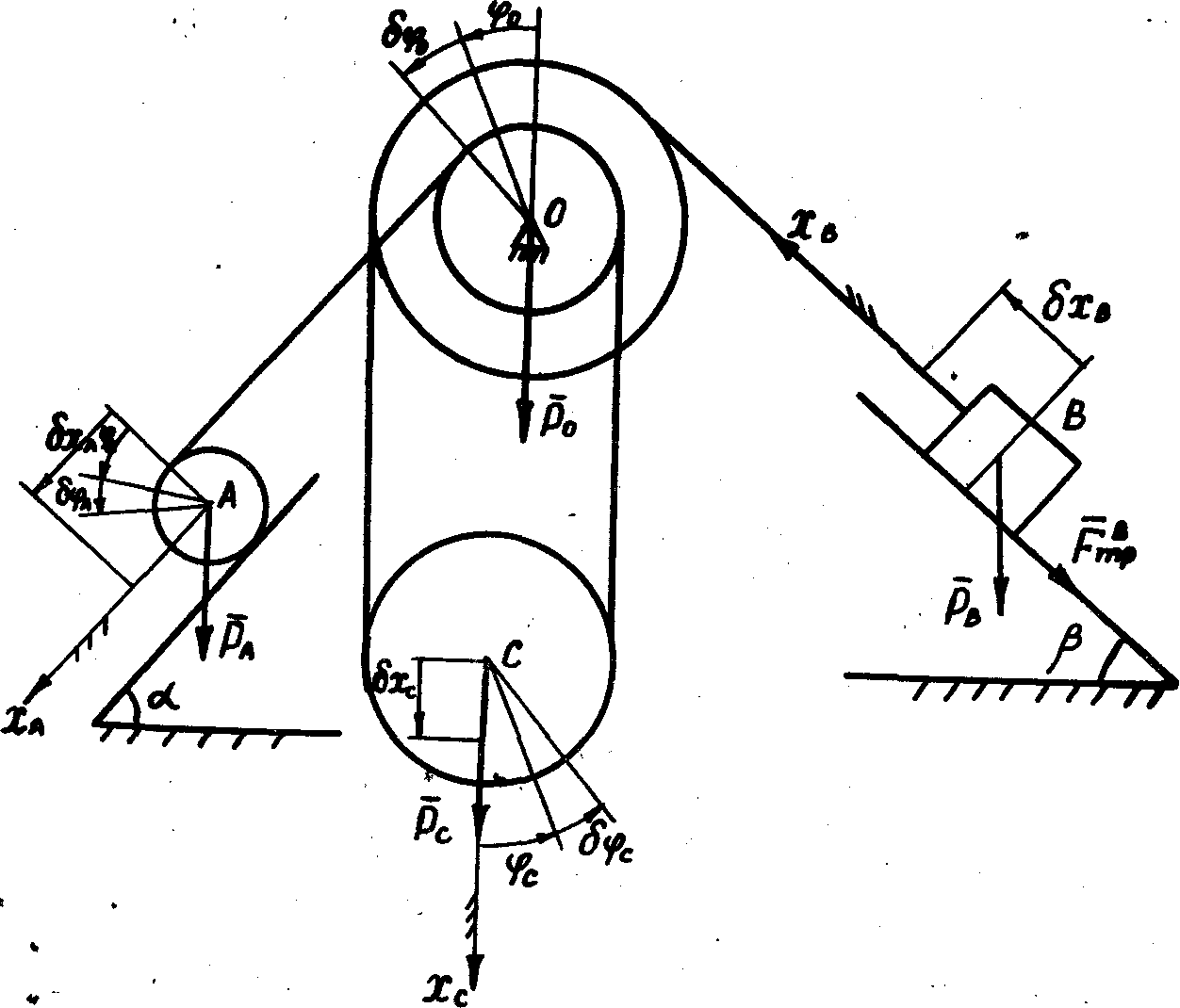
Рис.13. Расчетная схема механизма для уравнения Лагранжа.
Подобно тому, как это было сделано в разделе 3, составим выражение для кинетической энергии Т, представляя ее как квадратичную функцию обобщенной скорости:

или
где - выражение, стоящее в скобках и представляющее собой постоянный коэффициент, который зависит от собственных свойств системы.
Вычислим первые два слагаемых, входящих в левую часть уравнения (35):
![]() ,
(36)
,
(36)
![]() ,
(37)
,
(37)
так как кинетическая анергия явно не зависит от обобщенной координаты.
Для определения обобщенной силы Q найдем работу активных сил на возможном перемещении:
![]() .
(38)
.
(38)
Используя уравнения связей (см. таблицу), находим
 (39)
(39)
С помощью (39) преобразуем (38) к виду
![]() .
.
Согласно определению, коэффициент в этом выражении, стоящий перед возможным перемещением, представляет совой обобщенную силу:
![]() .
(40)
.
(40)
Подставляя
(36), (37) и (40) в уравнение (35) и решая его
относительно ускорения
![]() ,
получим результат, найденный
,
получим результат, найденный
 .
(41)
.
(41)
Дня нахождения законов движения всех звеньев механизма необходимо повторить интегрирование дифференциального уравнения (41) (см.раздел 2).