

2 Расчетная часть
2.1 Составление функциональной схемы сау и выбор принципиальных схем элементов её неизменяемой части
На рисунке 4 представлена функциональная схема разработанной автоматизированной системы.
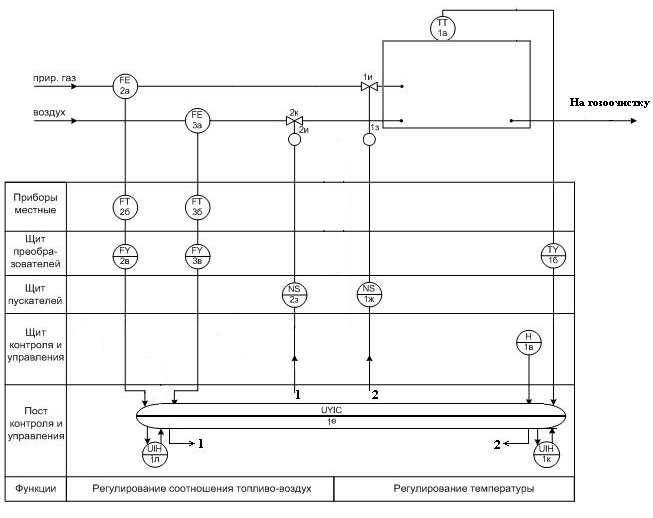
Рисунок 4- Функциональная схема САУ
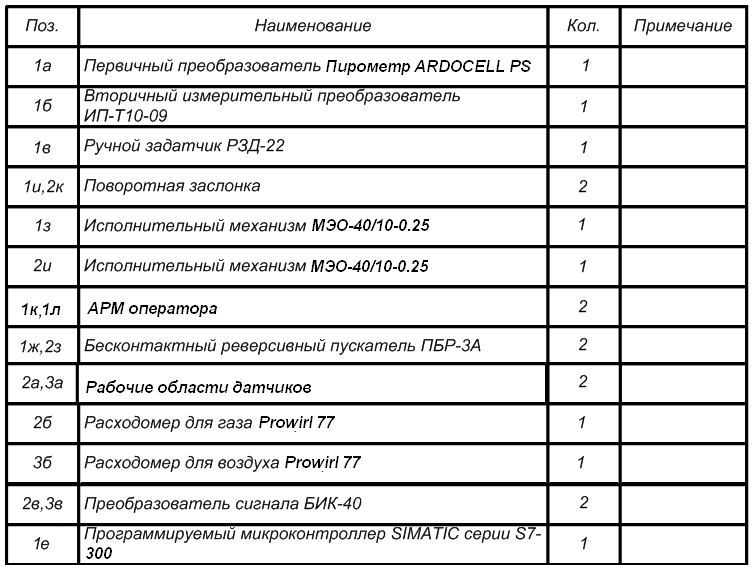
В таблице 1 приведена спецификация функциональной схемы.
Таблица 1 - Спецификация
 На
рисунке 4 представлена функциональная
схема разработанной системы. Принцип
действия её заключается в следующем:
в своде дымохода в специальное окно
устанавливается первичный преобразователь
температуры (ТТ), сигнал от которого
через вторичный измерительный
преобразователь (TY) поступает в
контроллер (UYIK), контроллер вырабатывает
управляющий сигнал либо на основе
программы либо на основе данных вводимых
с пульта управления оператора (UIH).
Управляющий сигнал поступает через
пускатели (NS) на исполнительные механизмы
один из которых отвечает за подачу
воздуха второй за подачу природного
газа в горелки дожигания. Расход газа
и воздуха измеряется расходомерами
(FE). Данные с расходомеров поступают в
контроллер. С контроллера вырабатываются
сигналы о расходе газа и воздуха а так
же сигналы о температуре которые
поступают в систему визуализации и
отображаются в виде числовых значений
на автоматизированных рабочих местах
оператора. В случае аварии система
визуализации с помощью специальной
сигнализации как звуковой так и световой
привлекает внимание оператора.
На
рисунке 4 представлена функциональная
схема разработанной системы. Принцип
действия её заключается в следующем:
в своде дымохода в специальное окно
устанавливается первичный преобразователь
температуры (ТТ), сигнал от которого
через вторичный измерительный
преобразователь (TY) поступает в
контроллер (UYIK), контроллер вырабатывает
управляющий сигнал либо на основе
программы либо на основе данных вводимых
с пульта управления оператора (UIH).
Управляющий сигнал поступает через
пускатели (NS) на исполнительные механизмы
один из которых отвечает за подачу
воздуха второй за подачу природного
газа в горелки дожигания. Расход газа
и воздуха измеряется расходомерами
(FE). Данные с расходомеров поступают в
контроллер. С контроллера вырабатываются
сигналы о расходе газа и воздуха а так
же сигналы о температуре которые
поступают в систему визуализации и
отображаются в виде числовых значений
на автоматизированных рабочих местах
оператора. В случае аварии система
визуализации с помощью специальной
сигнализации как звуковой так и световой
привлекает внимание оператора.
2.2 Описание функциональной схемы разрабатываемой системы
Для перехода к математической модели системы представим функциональную схему в более простом виде на рисунке 5.
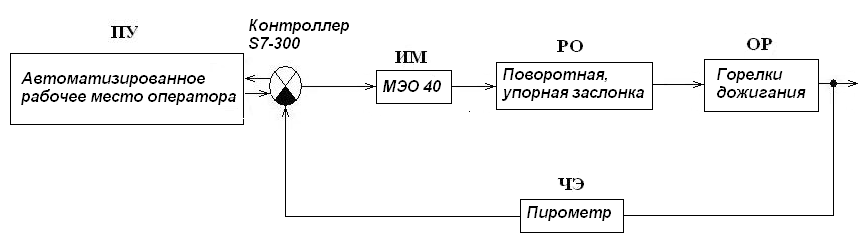
Рисунок 5 – Упрощенная функциональная схема
В данной АСУ
горелками дожигания в качестве пульта
управления (ПУ) используется персональный
компьютер с установленной на нем системой
визуализации InTuch, которая позволяет
как следить за технологическим процессом
так и вносить необходимые коррективы
в работу горелок дожигания. Исполнительным
механизмом (ИМ) в системе является МЭО-40
так как позволяет с достаточной точностью
отрабатывать сигнал поступающий с
контроллера, механизм МЭО-40 прост в
обслуживании и способен работать в
тяжелых промышленных условиях. В качестве
регулирующего органа (РО) используется
поворотная, упорная заслонка, выбор
упорной заслонки обусловлен тем что
при полном её закрытии предотвращается
утечка газа в газопроводе. Объект
регулирования (ОР) – это горелки дожигания
шахтной печи. Чувствительным элементом
(ЧЭ) системы является пирометр.
Выбор пирометр для данной системы не
случаен так как его использование более
выгодно чем использование термопары
как с экономической точки зрения так и
с технической. Пирометр  более
долговечен по сроку службы так как
устанавливается не в близости открытого
пламени а на определенном расстоянии
тем самым он не подвергается термическому
воздействию. За счет пирометра
обеспечивается большая точность
измерения. Короткое время срабатывания
гарантирует оптимальное управление
процессом.
Так же в системе установлены датчики
расхода воздуха и расхода
газа Prowirl
77 которые не отображены на схеме так
как используются только для контроля
расхода воздуха и газа. Установка
датчиков Prowirl
вместо расходомерных диафрагм позволяет
отслеживать расход как газа так и воздуха
с высоко точностью, они имеют высокую
отказоустойчивость, интуитивный
интерфейс настройки и функции
самодиагностики. Сигналы с датчиков
поступают на контроллер S7-316
2DP. Замена контроллера Ремиконт на
контроллер SIMATIC
S7-300
обусловлена во-первых высоким
быстродействием последнего, котроллер
S7-300
может и в дальнейшем использоваться
если потребуется расширение системы,
он полностью конфигурируется с датчиками
и исполнительными механизмами, достаточно
просто осуществляется подключение к
промышленным сетям, обеспечивает высокую
надежность работы за счет современной
конструкции чего нельзя сказать о
контроллере Ремиконт. Сигнал с контроллера
поступают пульт управления оператора
и на исполнительный механизм.
Функционирование схемы заключается в
следующем: сигнал с датчика температуры
поступает на контроллер в котором
происходит сравнение этого значения с
заданным в случае рассогласования
контроллер вырабатывает управляющий
сигнал на исполнительный механизм
который в свою очередь воздействует на
регулирующий орган, тем самым изменяется
соотношение газ-воздух и система приходит
к требуемому состоянию.
более
долговечен по сроку службы так как
устанавливается не в близости открытого
пламени а на определенном расстоянии
тем самым он не подвергается термическому
воздействию. За счет пирометра
обеспечивается большая точность
измерения. Короткое время срабатывания
гарантирует оптимальное управление
процессом.
Так же в системе установлены датчики
расхода воздуха и расхода
газа Prowirl
77 которые не отображены на схеме так
как используются только для контроля
расхода воздуха и газа. Установка
датчиков Prowirl
вместо расходомерных диафрагм позволяет
отслеживать расход как газа так и воздуха
с высоко точностью, они имеют высокую
отказоустойчивость, интуитивный
интерфейс настройки и функции
самодиагностики. Сигналы с датчиков
поступают на контроллер S7-316
2DP. Замена контроллера Ремиконт на
контроллер SIMATIC
S7-300
обусловлена во-первых высоким
быстродействием последнего, котроллер
S7-300
может и в дальнейшем использоваться
если потребуется расширение системы,
он полностью конфигурируется с датчиками
и исполнительными механизмами, достаточно
просто осуществляется подключение к
промышленным сетям, обеспечивает высокую
надежность работы за счет современной
конструкции чего нельзя сказать о
контроллере Ремиконт. Сигнал с контроллера
поступают пульт управления оператора
и на исполнительный механизм.
Функционирование схемы заключается в
следующем: сигнал с датчика температуры
поступает на контроллер в котором
происходит сравнение этого значения с
заданным в случае рассогласования
контроллер вырабатывает управляющий
сигнал на исполнительный механизм
который в свою очередь воздействует на
регулирующий орган, тем самым изменяется
соотношение газ-воздух и система приходит
к требуемому состоянию.