

Векторное ускорение для определения ускорения точки с имеет вид
(1.10)![]()
Нормальное относительное ускорение кинематической пары С направленное от точки С к В, вычисляют по зависимости
(1.11)![]()
Где
![]() -
нормальное относительное ускорение
кинематической пары С
-
нормальное относительное ускорение
кинематической пары С
Аналогично векторному уравнению скоростей подчеркнем в уравнении (1.10) известные по величине и направлению ускорения двумя чертами. Тангенциальное относительное ускорение и ускорение точки С известны только по направлениям, причем аtсв перпендикулярно звену ВС, ускорение ас – параллельно направляющим ползуна. Эти ускорения подчеркиваются одной чертой.
Поскольку в уравнении (1.10) имеется два неизвестных по величине ускорения, то решим уравнение графически. Для этого построим план ускорений (рисунок 5).

Рисунок 5 – План ускорений для первого положения механизма
Выберем масштаб плана ускорений
(1.12)![]()
Где
![]() -
масштаб плана ускорений,
-
масштаб плана ускорений,
(раа) = 50 мм – произвольно выбранный отрезок на плане ускорений, отображающий ускорение точки В и направленный параллельно АВ из полюса плана ускорений ра.
![]()
Отрезок на плане ускорений ab, отображающий нормальное относительное ускорение аnсв и направленное из точки а плана параллельно звену ВС, вычисляют с учетом масштаба
(1.13)
И
(1.14)
![]()
(1.15)![]()
Поскольку тангенциальное ускорение 1-го звена равно нулю, то и угловое ускорение также равно нулю.
Угловое ускорение 2-го звена равно
(1.16)![]()
![]()
Где
![]() -
угловое ускорение второго звена
-
угловое ускорение второго звена
Аналогичные расчеты ускорений точек механизма проводим в остальных одиннадцати положениях механизма (таблица 4).
Таблица 4 – Ускорения точек механизма
|
(ab), мм |
|
(bc), мм |
|
(Pаc), мм |
|
|
1 |
13 |
1031 |
28 |
-2202.76 |
42 |
3304 |
-10489 |
2 |
3 |
304.76 |
45 |
-3540 |
16 |
1258 |
-16857 |
3 |
0 |
0 |
52 |
-4090 |
15 |
-1180 |
-19476 |
4 |
4 |
382.29 |
42 |
-3304 |
32 |
-2517 |
-15733 |
5 |
12 |
987.42 |
23 |
-1809 |
35 |
-2753 |
-8614 |
6 |
15 |
1219 |
0 |
0 |
35 |
-2753 |
0 |
7 |
11 |
901.6 |
25 |
1966 |
39 |
-3068 |
9361 |
8 |
3 |
304.76 |
46 |
3618 |
33 |
-2596 |
17228 |
9 |
0 |
0 |
53 |
4169 |
18 |
-3216 |
19852 |
10 |
4.8 |
382.29 |
42 |
3304 |
18 |
3216 |
15733 |
11 |
12 |
987.42 |
23 |
1809 |
47 |
3697 |
8614 |
12 |
15 |
1219 |
0 |
0 |
35 |
2753 |
0 |
Строим диаграмму изменения ускорения ползуна ас от угла поворота кривошипа φ. Диаграмма изменения ускорения ползуна строится в своём масштабе μа и μφ. Полученную диаграмму также можно получить при помощи графического дифференцирования графика Vс от φ.
1.4 Силовое исследование механизма
1.4.1 Силовое исследование ползуна
Силовое исследование начинается с последнего ведомого звена, которое называется рабочим (рисунок 6).
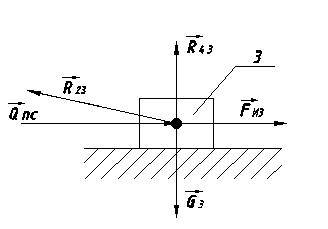
Рисунок 6 – Действие сил на третье звено
На третье звено действуют следущие силы:
- сила полезного сопротивления Qп.с., которая всегда направлена противоположно скорости ползуна Vc (Qп.с. = 17 кН = 17000 Н);
-
(1.17)
![]()
Где
![]() -
сила тяжести ползуна,
-
сила тяжести ползуна,
![]() -
масса ползуна,
-
масса ползуна,
g- ускорение свободного падения
![]()
- сила инерции ползуна Fи3, направлена противоположно его ускорению
(1.18)![]()
- реакции R23 со стороны звена 2 на звено 3, которая направлена вдоль звена 2;
- реакции R43 со стороны отброшенного звена 4 на звено 3, направленной перпендикулярно направляющей ползуна.