

Хід виконання роботи
Лабораторна робота виконується на протязі двох занять.
Заняття 1.
Навчитись оперувати з органами керування та індикаторами, розміщеними на передній панелі приладу. Навчитись переводити контролер в різні режими роботи.
Перевести контролер в режим конфігурування; підключити, за допомогою структурних перемикачів S1, S2, вибрану схему функціонування контролера; настроїти приладні параметри контролера, встановивши значення відповідних структурних перемикачів (див. додаток 3).
В режимі керування процесом провести зміну завдання, вихідної величини регулятора , перевірити дію порогових реле.
Перевести контролер в режим настроювання параметрів, змінити значення параметрів.
В режимі керування процесом відслідкувати зміну функціонування контролера після зміни параметрів.
Заняття 2.
Дослідити роботу контролера при підключенні вхідних сигналів.
Відслідкувати функціонування П, ПІ, ПД, ПІД законів регулювання.
Додаток 1
С
Значення перемикача
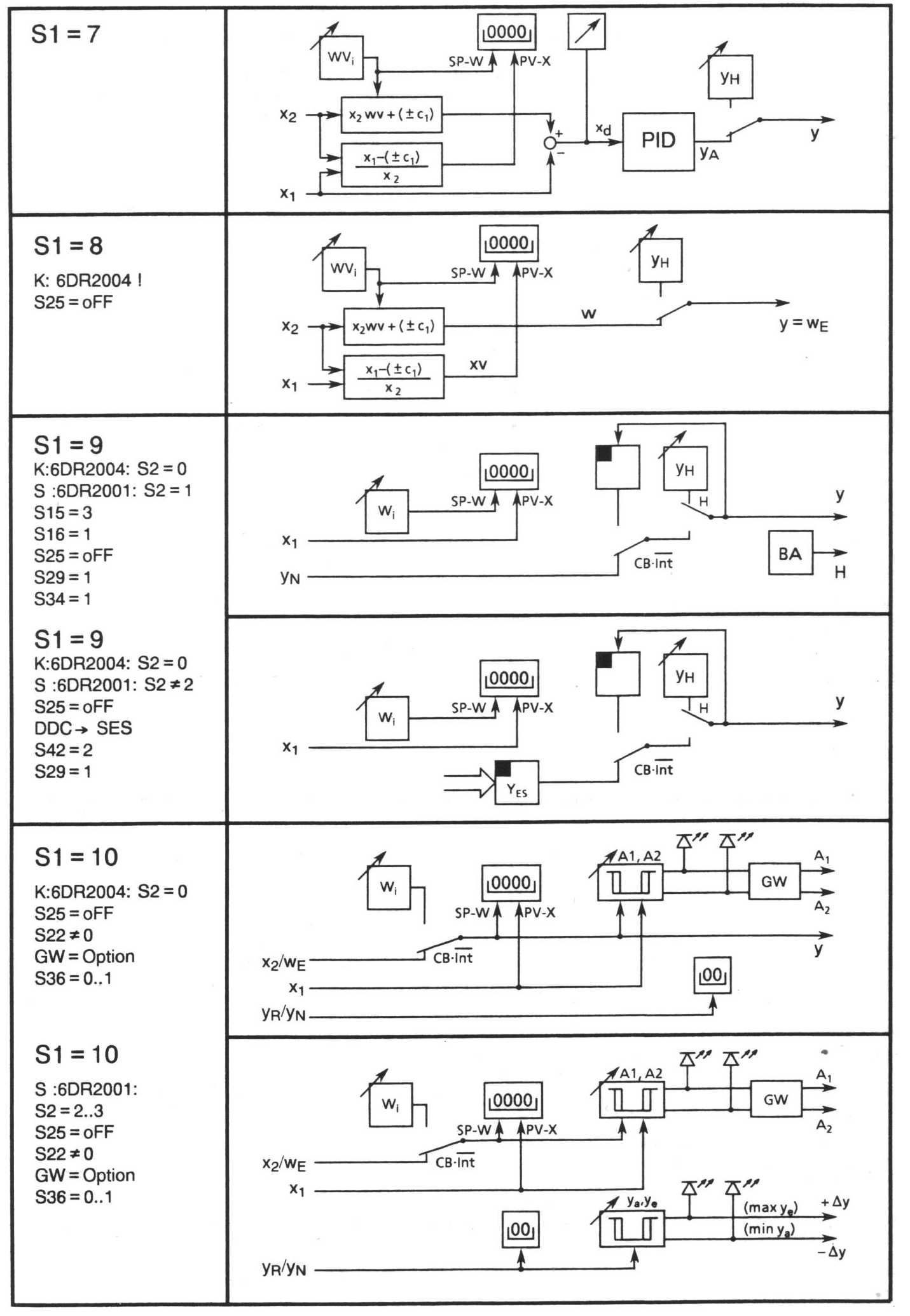
S1
Схема функціонування контролера
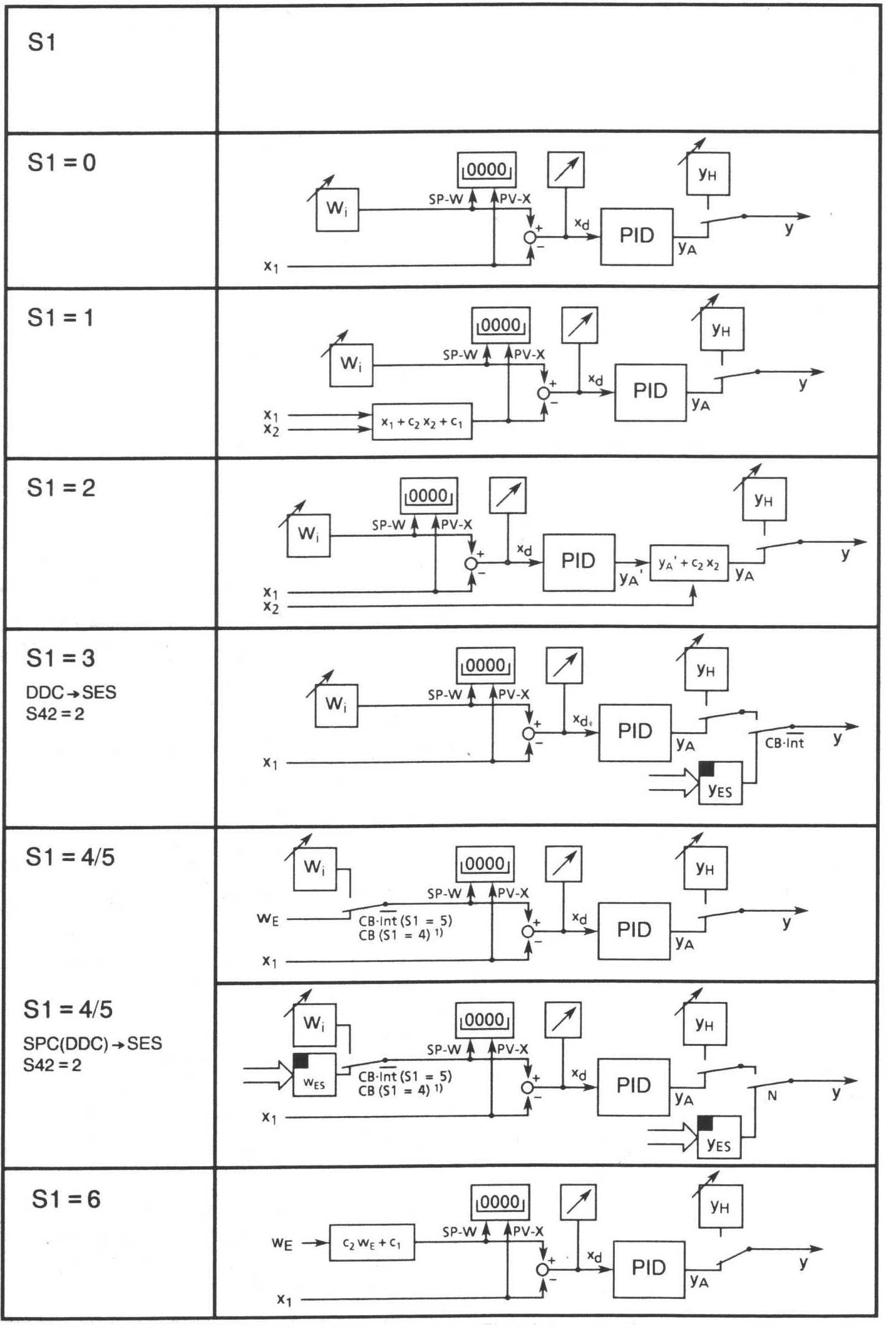
Схеми функціонування контролера (продовження)
С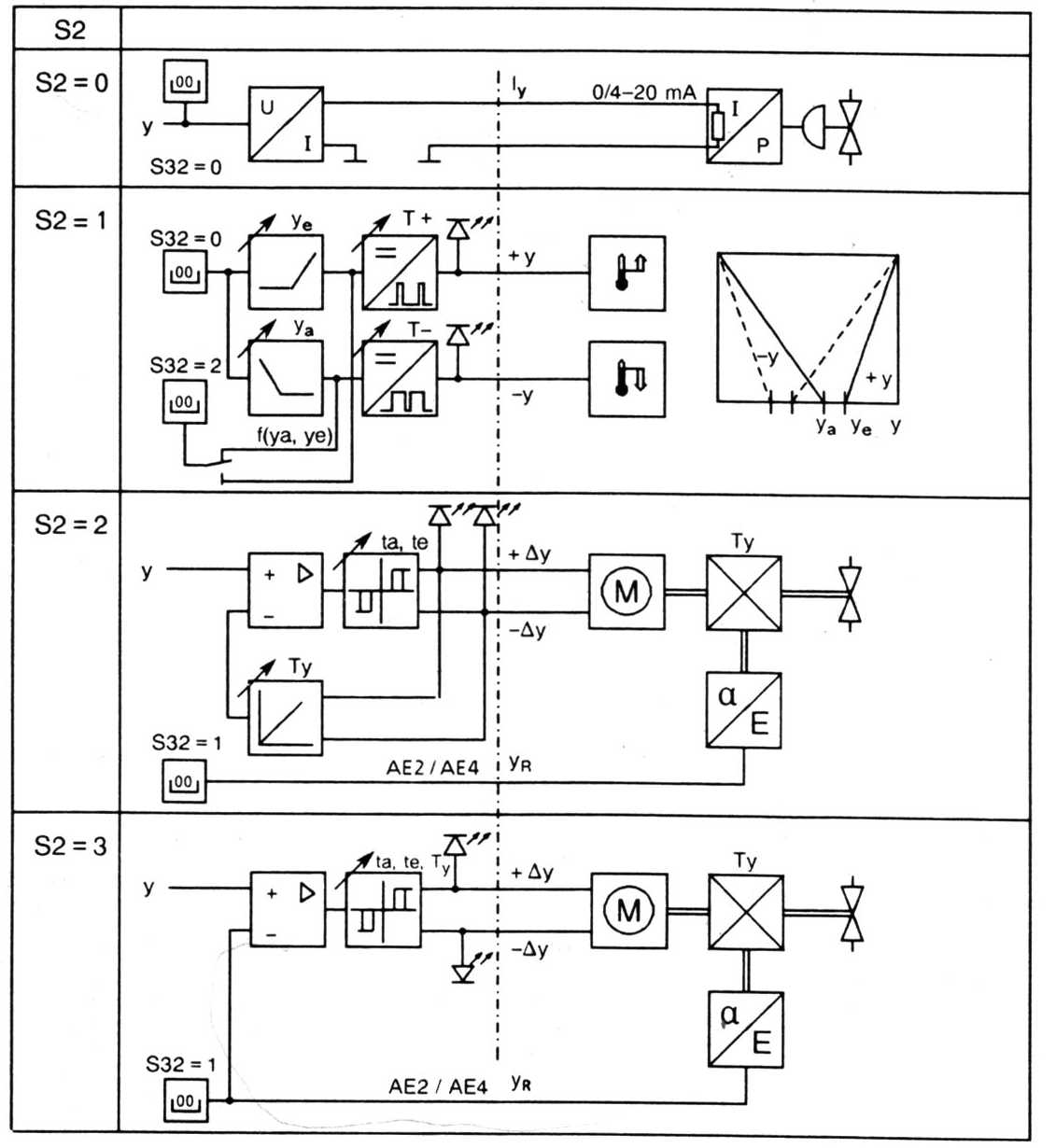 труктура
вихідного сигналу контролера
труктура
вихідного сигналу контролера
Додаток 2
Таблиця настроювальних параметрів контролера.
|
Назва параметру |
Позна-чення в |
На інди-каторі |
Мін. значення |
Макс значення |
Знач. вироб-ника |
Роз-мір-ність |
Роздільна здат-ність |
Примітки |
|
Коефіцієнт підсилення дифскладової |
Vv |
“uu” |
1.00 |
10.0 |
5.00 |
- |
128 зна-чень на окта-ву |
|
Коефіцієнт пропорційної складової |
Кр |
“сР” |
0.10 |
100.0 |
0.10 |
- |
|
||
Час інтегрування |
Tn |
“tn” |
1.00 |
9984 |
9984 |
сек. |
Для ПІ регулятора S28=0 |
||
Робоча точка |
Yo |
“Yo” |
Auto 0.0 |
99.5 |
Auto |
% |
0.1 % |
Для П регулятора S28=1 |
|
Час диференціювання |
Тv |
“tu” |
OFF 1.00 |
1000 |
OFF |
сек. |
128 зна-чень на окта-ву |
Tv=Td*Vv |
|
Стала часу фільтру для xd |
TF |
“tF” |
OFF 1.00 |
1000 |
OFF |
сек. |
|||
Час встановлення завдання ??????? |
Tw |
“tS” |
OFF 1.00 |
9984 100 |
OFF |
сек. |
|||
Час позиціонування клапана / період y+ |
Ty T+ |
“ty” |
1.00 |
1000 |
60.00 |
сек. |
Тільки для S-викона-ння; Т+/T- для двох каналів двопозицій-ного регулятора (S2=1) |
||
Період y- |
T- |
“t-” |
1.00 |
1000 |
60.00 |
сек.
|
|||
|
Початок шкали (0 %) |
LA |
“LA” |
-1999 |
9999 |
0.0 |
- |
|
|
Координата 1/8 = 12.5 % |
L1 |
“L1” |
-1999 |
9999 |
0.0 |
- |
|
Параметри L1…L7 застосовуються тільки для лінеаризації показів індикатора (S14=1) |
|
Координата 2/8 =25% |
L2 |
“L2” |
-1999 |
9999 |
0.0 |
- |
|||
Координата 3/8 = 37.5 % |
L3 |
“L3” |
-1999 |
9999 |
0.0 |
- |
|||
Координата 4/8 = 50% |
L4 |
“L4” |
-1999 |
9999 |
0.0 |
- |
|||
Координата 5/8 = 62.5 % |
L5 |
“L5” |
-1999 |
9999 |
0.0 |
- |
|||
Координата 6/8 = 75% |
L6 |
“L6” |
-1999 |
9999 |
0.0 |
- |
|||
Координата 7/8 = 87.5 % |
L7 |
“L7” |
-1999 |
9999 |
0.0 |
- |
|||
Кінець шкали (100%) |
LE |
“LE” |
-1999 |
9999 |
100.0 |
- |
|
||
|
Нижня межа завдання |
wa wva |
“SA” |
-1999 |
9999 |
-5.0 |
- |
Зміна завдання тільки в межах від wa/wva до we/wve |
|
Верхня межа завдання |
wе wvе |
“SЕ” |
-1999 |
9999 |
105.0 |
- |
|||
Завдання безпеки
|
ws |
“SH” |
-1999 |
9999 |
0.0 |
- |
|||
|
Граничне значення, мінімум |
а2 |
“А2” |
-1999 |
9999 |
-5.0 |
- |
При настроюванні, обов’язково а2а1. Див. S24 |
|
Граничне значення, максимум |
а1 |
“А1” |
-1999 |
9999 |
5.0 |
- |
|||
|
Границя відповіді xd |
A |
“A” |
0.0 |
10.0 |
0.0 |
% |
|
|






|
Обмеження виходу регулятора |
Ниж-нє |
уа |
“уА” |
-10.0 |
110.0 |
-5.0 |
% |
|
уауе S2=1: уа та уе обмежують зону нечутливості S2=2: уа та уе не задіяні S2=10: уа/уе –min/max для 2-го порогу |
Верх-нє |
уе |
“уЕ” |
-10.0 |
110.0 |
105.0 |
% |
||||
Границя безпеки регулюючої дії |
уs |
“уS” |
-10.0 |
110.0 |
0.0 |
% |
||||
|
Стала с1 (нуль шкали) |
с1 |
“с1” |
-199.9 |
199.9 |
0.0 |
% |
|||
Стала с2 (нахил шкали) |
с1 |
“с1” |
-199.9 |
199.9 |
0.0 |
% |
|
|
||

Додаток 3