

Рассуждения с нечеткими множествами
В формальной логике по отношению к множествам действует два предположения, которые не могут нарушаться:
Установление принадлежности (любой элемент является либо членом множества, либо членом дополнения этого множества).
Дополнение – это операция, которая ставит в соответствие подмножеству М множества Х другое подмножество N, также принадлежащее Х, так что по этим двум подмножествам множество Х может быть восстановлено.
Закон исключения третьего (элемент не может одновременно принадлежать и множеству и его дополнению).
Оба эти положения нарушаются в так называемой теории нечетких множеств (fuzzy set theory) автора Лофти Заде (Zadeh). Именно он множества и законы традиционной логики назвал четкими, а свои множества – нечеткими.
Главное утверждение Заде относится к 1983 г. и говорит о том, что теория вероятностей является хорошим инструментом для измерения количества случайной информации, но не подходит для измерения смысла информации.
Пример:
Путаница, которая возникает при распознавании слов и фраз естественного языка связанна не с неопределенностью этих слов с точки зрения их случайности, а с отсутствием ясности, как их распознать.
Именно это играет важнейшую роль для определения меры достоверности правил, по которым определяется вывод. Для измерения такой неопределенности, связанной со смыслом, Заде разработал теорию возможностей.
В ней сформулировано два основных положения:
количественное выражение точности, для чего введена функция принадлежности, которая принимает значения в интервале от 0 до 1;
понятие нечеткого множества (fuzzy set)
Пусть S
– некоторое множество, а
![]() –
его элемент.
–
его элемент.
Нечеткое подмножество F этого множества S определяется функцией принадлежности mF( ), которой задают степень принадлежности элемента подмножеству F.
Рассмотрим пример:
Пусть S – множество всех положительных чисел. И пусть мы хотим задать множество малых целых чисел. Это будет нечеткое подмножество F.
Функцию принадлежности для него можно задать, например, в таком виде:
![]()

В общем случае для описания принадлежности некоторого элемента множеству F необходимо задать такую функцию принадлежности mF для всего множества элементов S, которому F принадлежит как подмножество.
Создание таких конкретных функций для разных задач – это первый важный вопрос теории нечетких множеств.
Второй вопрос этой теории – это создание таких отношений, таких правил вычисления комбинированных возможностей, которые позволяют производить вычисления на выражениях, содержащих нечеткие переменные.
Заде ввел правила для вычисления меры возможности для операций логических «или» (or) и логических «и» (and) над такими выражениями.
Эти правила напоминают соответствующие выражения стэндфордской алгебры фактора уверенности. А именно, если две предпосылки правила связанны логическим «или», то в качестве меры берется максимум, если же логической «и», то – минимум.
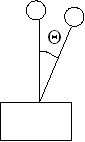
Рассмотрим классический пример задачи управления из теории нечетких множеств.
Пусть в вертикальном положении необходимо удерживать перевернутый маятник за счет передвижения его основания.
В искусственных системах классический подход к решению такой задачи состоит в измерении Q отклонения маятника от вертикали, скорости отклонения dQ/dt и формировании закона управления перемещением основания на базе решения системы дифференциальных уравнений. Это очень сложная задача при таком традиционном подходе. Решение есть, но в очень ограниченном диапазоне малых углов отклонения Q.
Теория нечетких множеств дает эффективный алгоритм управления в реальном времени без этих ограничений и позволяет построить контроллер , входными сигналами для которого являются отклонение Q и скорость dQ/dt, а выходными сигналами – детерминированный неразмытый закон управления.
Обычно этот сигнал формируется в виде величины и направления перемещения основания системы.
Внутри контроллера входные данные интерпретируются как два нечетких подмножества Q и dQ/dt, которые затем используются в множестве нечетких правил.
Этот второй шаг реализуется с помощью нечеткой ассоциативной матрицы (fuzzy associative matrix). В этой матрице входы и выходы контроллера кодируются напрямую.
Правила не объединяются в цепочку, как при традиционном решении. Все применимые на данном шаге правила активизируются и срабатывают, а затем их результаты объединяются. При этом общий результат задается, также как и входные параметры, областью пространства нечетких выходных параметров.
И, наконец, эта область подвергается операции, которая называется дефазификацией для получения четкого управляющего воздействия.
Таким образом, и выходы здесь четкие, т.е. внешне контроллер ведет себя как обычное устройство управления, а внутри между этими двумя точками действуют законы нечетких множеств.
Упростим задачу: пусть движение происходит в плоскости, а именно:
Вправо положительное отклонение, влево - отрицательное. Соответственно положительным или отрицательным может быть и перемещение основания.
Измеряются угол Q и скорость dQ/dt. Вырабатывается управляющее воздействие U.
Рассмотрим конкретный пример.
Пусть необходимо удерживать в вертикальном положении маятник на плоскости. Измеряются угол отклонения маятника Q вправо или влево и скорость этого отклонения dQ/dt. Необходимо сформировать перемещение основания маятника вправо или влево с тем, чтобы удержать маятник в вертикальном положении.
Пусть отклонение
Q
меняется в пределах -2
![]() 2 радиан, а скорость может колебаться в
пределах -5
5 °/с.
2 радиан, а скорость может колебаться в
пределах -5
5 °/с.
На первом шаге необходимо представить эти входные сигналы в виде размытых множеств с соответствующими функциями принадлежности.
Пусть каждый из входных сигналов может находиться в одной из трех областей:
области N отрицательных значений;
области P положительных значений;
области Z нулевых значений.
Для Q функция принадлежности в этом случае может иметь вид:

-2 -1 0 1 2
Аналогично для угловой скорости функция принадлежности имеет вид:

Общие правила задания этих функций принадлежности:
Область равновесия находится в области нулевых значений. Задается эта область так: ордината равна единице в нулевой точке (точке равновесия) и из этой точки значения функций принадлежности линейно падают до границ изменения сигнала.
Области положительных и отрицательных значений в точке равновесия начинаются из нуля и линейно нарастают до границ изменения входного сигнала, становясь на границе равными единице, и для значений вне диапазона остаются равными единице.
На следующем, втором шаге, необходимо задать формируемый выходной сигнал в виде размытого множества.
Пусть сигнал управления перемещением основания маятника меняется в интервале -24 24 единиц. В рассматриваемом случае целесообразно ввести пять областей неоднозначности для выходного сигнала, что зависит от того, совпадает ли характер областей у обоих входных сигналов. Эта функция принадлежности имеет вид:

Здесь уже пять областей неоднозначности выходного сигнала:
Z – область нулевых значений;
N – область отрицательных значений;
NB – область больших отрицательных значений;
PB – область больших положительных значений;
Попадание выходного сигнала в ту или иную область при соответствующих значениях входных сигналов напрямую кодируется с помощью ассоциативной матрицы, которая в данном случае имеет вид:
dQ\dt Q |
P |
Z |
N |
P |
PB |
P |
Z |
Z |
P |
Z |
N |
N |
Z |
N |
NB |
Введем обозначения:
Q![]()
![]() ;
dQ/dt
;
dQ/dt
![]() .
.
Этой ассоциативной матрице в базе знаний с учетом введенных обозначений будут соответствовать следующие правила:
if =P and =P then U=PB
if =P and =Z then U=P
if =Z and =P then U=P
if =Z and =Z then U=Z
if =Z and =N then U=N
if =N and =Z then U=N
if =N and =P then U=Z
if =P and =N then U=Z
if =N and =N then U=NB
Теперь для каждого из результатов этих правил необходимо определить в соответствии с правилами Заде значения функции принадлежности.
Рассмотрим этот шаг на примере:
Пусть перемещение Q=1, а скорость dQ/dt=-4. В соответствии с их функциями принадлежности Q=1 принадлежит двум областям: нулевой области Z и положительной области P, причем каждой из них со значениями функции равной 0,5. Значение скорости, равное –4, также принадлежит двум областям: области отрицательных значений N и области нулевых значений Z. Но функция принадлежности для области Z равна 0,2, а для области N – 0,8.
Итак, может принадлежать области Z и P, а – областям N и Z. Это означает, что из девяти записанных правил в данном случае будут активизированы 4, в которых и принимают соответствующие значения.
Активизируются 4 правила, в которых предпосылки связанны логическими «и». Поэтому в соответствии с сформулированными правилами определяются функции принадлежности результата для каждого из этих правил будет браться минимальное из значений функции принадлежности предпосылок.
if =P and =Z then U=P
min(0.5, 0.2)=0.2P
if =P and =N then U=Z
min(0.5, 0.8)=0.5Z
if =Z and =Z then U=Z
min(0.5, 0.2)=0.2Z
if =Z and =N then U=N
min(0.5, 0.8)=0.5N
Итак, в соответствии с теорией Заде сработало не одно, а все правила, которые включают входные сигналы в соответствующих областях.
Теперь необходимо объединить эти результаты.
Для этого выбираются все области, в которых может находиться выходной сигнал. В них строится фигура, ограниченная границами самих областей и соответствующими уровнями функции принадлежности.
И на последнем шаге определяется координата центра тяжести этой фигуры.
Этот метод объединения результатов наиболее распространен и называется методом центра тяжести.
Выполним этот шаг для рассматриваемого примера.
Выходной сигнал может находиться в трех областях N, Z, P. Причем в соответствии со срабатывающими правилами функция принадлежности принимает следующие значения:
0.2P;
0.5Z;
0.2Z;
0.5N.
Здесь два правила, которые приводят к попаданию в одну и ту же область. Такой результат требует объединения. Так как правила независимы, а результаты объединены логическим «или», тогда в соответствии с сформулированными правилами из этих двух результатов нужно взять максимум:
![]()
Строим ограниченную границами областей и уровнями функций принадлежности фигуру.

Осталось определить центр тяжести.

Центр тяжести этой фигуры соответствует значению U=-2.
Итак, на контроллер здесь поступили реальные измеряемые неразмытые сигналы Q=1 и dQ/dt=-4. В результате контроллер выработал обычный управляющий сигнал величиной две единицы в отрицательном направлении.
Это управляющее воздействие применяется в системе, опять измеряются Q и dQ/dt, цикл повторяется, а маятник удерживается в вертикальном положении.
Таким образом, аппарат Заде дает инженеру мощный инструментарий для решения задач управления в тех случаях, когда традиционный аппарат с оптимальным управлением не справляется.