

5. Бесконтактные двигатели постоянного тока
5.1. Принцип действия и основные функциональные и принципиальные схемы
Двигатели этого типа получили широкое распространение главным образом за последние десятилетия благодаря успехам полупроводниковой техники. Щеточно-коллекторный узел обычного двигателя постоянного тока удалось заменить более надежной полупроводниковой схемой, управляемой сигналами бесконтактного датчика положения ротора. В отличие от коллекторного двигателя постоянного тока бесконтактный двигатель имеет обмотку якоря на статоре, а систему возбуждения (полюсы) на роторе. Электронный коммутатор (К), изменяющий направление тока в секциях, выполняется обычно в виде отдельного блока, соединенного проводниками с обмоткой статора двигателя Д и датчиком положения ротора (Д/7) (рис. 8).
По своей конструкции бесконтактный двигатель постоянного тока напоминает синхронный двигатель, ток в фазах которого изменяется в зависимости от положения ротора. Вследствие этого имеются два подхода к рассмотрению электромагнитных процессов в бесконтактном двигателе.
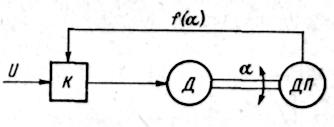
Рис. 8. Структурная схема бес контактного двигателя постоянного тока
При первом двигатель рассматривается как машина постоянного тока, в которой коммутатор поддерживает направление н.с. обмотки, перпендикулярное оси магнитного потока возбуждения.
При втором подходе двигатель считается синхронным с переменной частотой питающего напряжения, зависящей от угловой частоты вращения ротора. В настоящей главе принята первая точка зрения как наиболее полно отражающая сущность физических явлений в двигателе.
Для уяснения принципа работы двигателя обратимся к рис. 9, на котором схематически показаны: ротор — постоянный магнит; обмотка статора в виде одного витка; датчик углового положения, состоящий из чувствительных элементов 1 и 2 и якоря; электронный коммутатор, выполненный в виде моста из четырех транзисторов (VT1, VT1', VT2, VT2').
В положении ротора, указанном на рисунке, якорь ДП взаимодействует с чувствительным элементом 1 триоды VT1 и VT2' открыты, a VT2, VT1' закрыты. Ток I в витке имеет направление, указанное стрелкой. В результате взаимодействия этого тока с полем постоянного магнита к ротору прикладывается момент, направленный против часовой стрелки (если смотреть со стороны датчика положения).
Под действием этого момента ротор двигателя вращается в том же направлении. Когда ротор примет положение, при котором ось полюсов станет перпендикулярна плоскости витка, момент окажется равен нулю и при дальнейшем вращении ротора будет его тормозить, если направление тока витка останется неизменным. Однако этого не происходит, поскольку в указанном положении ротора якорь ДП взаимодействует уже с чувствительным элементом 2, вследствие чего триоды VT1, VT2' закрываются, a VT2 и VТ1' открываются. Ток получаетобратное направление, и вращающий момент, приложенный к ротору двигателя, сохраняет свое направление. При повороте ротора на 180° картина повторяется. Переключение тока в витке на обратное направление (коммутация) происходит в положении ротора, при котором ЭДС в витке и момент равны нулю.
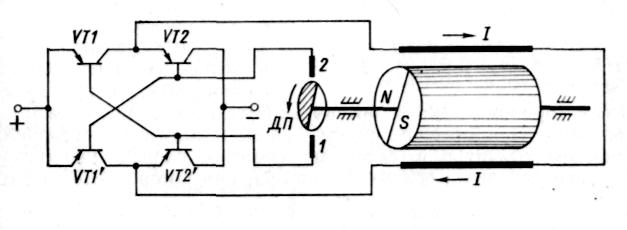
Рис. 9. Принципиальная схема односекционного бесконтактного двигателя постоянного тока
На рис. 10 приведены кривые изменения ЭДС и момента в функции угла поворота ротора а в предположении, что индукция постоянного магнита имеет синусоидальное распределение по окружности ротора.
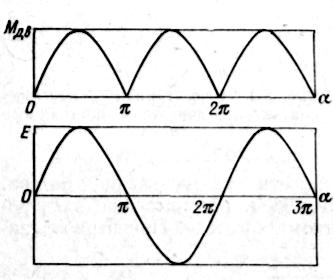
Рис. 10. Зависимость момента и ЭДС от угла поворота ротора
односекционного двигателя
Очевидный недостаток двигателя с одним витком (впрочем, как и обычного двигателя постоянного тока с одной секцией и двумя коллекторными пластинами) состоит в том, что момент двигателя имеет явно пульсирующий характер, а во время переключения тока становится равным нулю. Для устранения этого недостатка необходимо увеличивать число секций (витков) обмотки. При этом чем больше будет витков, тем меньше можно получить пульсации момента. Однако значительное увеличение числа секций приведет к росту числа коммутирующих полупроводниковых элементов и усложнению датчика положения ротора. Поэтому на практике ограничиваются двумя, тремя или четырьмя секциями. На рис. 11, а показана схема двухсекционного двигателя. Датчик положения двигателя содержит уже две пары чувствительных элементов 1—2 и 3—4, каждая из которых управляет коммутацией секций О1, и O2 соответственно. Секции обмотки 01 и 02 подключены к диагоналям транзисторных мостов, как показано на рис. 11, б. Последовательность переключения направления тока в каждой секции аналогична изложенной выше при рассмотрении односекционного двигателя. Пространственный сдвиг секций на 90° полностью исключает мертвое положение ротора, поскольку при нулевом моменте, развиваемом одной секцией, в другой секции в этом положении ротора момент максимален.
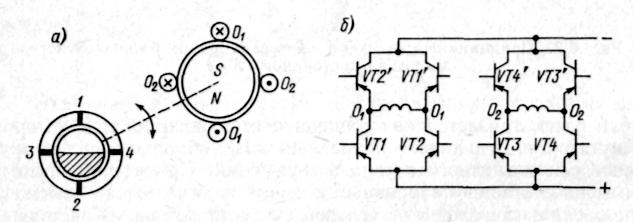
Рис. 11.Схема двухсекционного бесконтактного двигателя
постоянного тока: а — двигатель; б —электронный коммутатор
На рис.12 изображены угловые характеристики моментов М1 и М2, создаваемых секциями 01 и 02, и суммарный момент двигателя Мдв=М1+М2. Из графиков можно видеть, что наличие двух секций заметно выравнивает пульсации суммарного момента двигателя.
С целью упрощения схемы коммутатора двухсекционного двигателя, содержащей восемь силовых транзисторов, каждую из секций двигателя можно расщепить на две секции, а среднюю точку вывести на зажим источника питания, как это показано на рис. 13. Схема такого четырехсекционного двигателя будет содержать только четыре силовых транзистора. Секции О/1 и О//1, а также О/2 и О2// сдвинуты по отношению друг к другу на 180° и таким образом взамен реверсирования тока в секции 01 или 02 двухсекционного двигателя (рис. 11) производится поочередное включение секций О/1 и О//1 и соответственно О/2 и О2// у четырехсекционного двигателя. Упрощение схемы коммутатора (рис. 13) привело к появлению в схеме пассивных (не работающих часть времени) секций.
Получили распространение схемы трехсекционных двигателей. Две из них с соединением секций в звезду приведены на рис. 14 и 15.
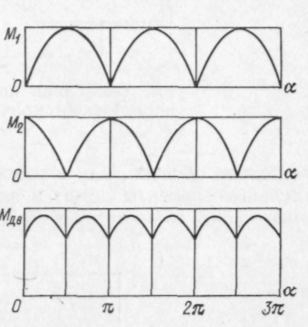
Рис. 12 .Зависимость момента от угла поворота ротора двух секционного двигателя
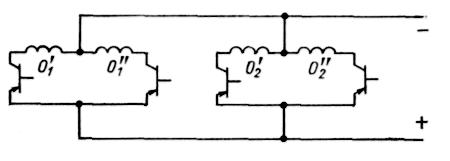
Рис. 13. Схема коммутатора четырехсекционного бесконтактного
двигателя постоянного тока
Схема на рис. 14 представляет собой вариант нереверсивного (однополупериодного) питания секций двигателя. Ток в каждой секции может протекать по ней только в одном направлении. Схема обмотки имеет вывод средней точки, а коммутатор содержит три силовых транзистора. Датчик положения ротора ДП состоит из трех чувствительных элементов 1, 2, 3, ориентированных относительно обмотки, как в односекционном двигателе, т. е. чувствительные элементы лежат в плоскостях эквивалентных витков, заменяющих соответствующие секции, а якорь представляет собой сектор, ось симметрии которого совпадает с осью полюсов магнита ротора. Угловой размер сектора обычно принимается равным 120°. Нумерация чувствительных элементов датчика на рисунке совпадает с нумерацией управляемых ими транзисторов коммутатора.

Рис. 14.Нереверсивный трехсекционный двигатель с соединением секций в звезду
Моменты М1, М2, М3, развиваемые секциями 1, 2, 3, и суммарный момент двигателя МДВ в зависимости от угла поворота ротора а представлены на том же рис. 14. При повороте ротора в направлении стрелки возбуждается чувствительный элемент 1, а сигнал с элемента 3 исчезает. Сигнал с элемента 1 отпирает транзистор VT1, в результате чего секция 1 запитывается током и создает электромагнитный момент М1. Секция 1подключена к источнику питания на интервале 120°, совпадающем с угловым размером сектора ДП. После поворота на 120° происходит отключение секции 1 и подключение секции 2, поскольку чувствительный элемент 2 входит во взаимодействие со следующим сектором ДП и оказывается в возбужденном состоянии. Работа рассматриваемого трехсекционного двигателя состоит в последовательном подключении его секций к источнику питания, что обеспечивается благодаря воздействию на коммутатор сигнала обратной связи, снимаемого с ДП.
На рис. 15 представлена схема трехсекционного двигателя с реверсивным питанием секций. Благодаря мостовой схеме коммутатора, содержащего шесть силовых транзисторов, ток в каждой секции может менять направление, что обеспечивает лучшее использование обмотки и всего объема двигателя. Датчик положения ротора имеет шесть чувствительных элементов, каждый из которых управляет соответствующим транзистором коммутатора. При этом чувствительные элементы 1, 2, 3, расположенные как и в предыдущей схеме, управляют нижними транзисторами коммутатора VT1, VT2, VT3, а чувствительные элементы 1', 2', 3', комплект которых смещен по отношению к комплекту 1, 2, 3 на 180°, управляют транзисторами VT1', VT2', VT3'. Таким образом, если возбуждение одного из чувствительных элементов приводит к протеканию тока по соответствующей секции в одном направлении, то возбуждение чувствительного элемента, сдвинутого на 180°, изменяет направление тока в этой секции на противоположное. Поскольку сдвиг между соседними чувствительными элементами составляет 60°, а угловой размер сектора якоря датчика положения равен 120°, то в возбужденном состоянии практически всегда находятся два чувствительных элемента и открытыми —два транзистора. К источнику всегда оказываются подключенными две секции двигателя. В положении, показанном на рис. 6-8, возбуждены элементы 1 и 2'. Открытыми оказываются транзисторы VT1 и VT2', а ток от источника проходит по секциям 1 и 2. После поворота ротора на 60° будут возбуждены элементы 3 и 1, секция 2 будет отключена, а цепь тока будет образована секциями 1 и 3. Диаграммы моментов, создаваемых парами секций 1—2, 1—3, 2—3, и диаграмма суммарного момента также представлены на рис. 15.
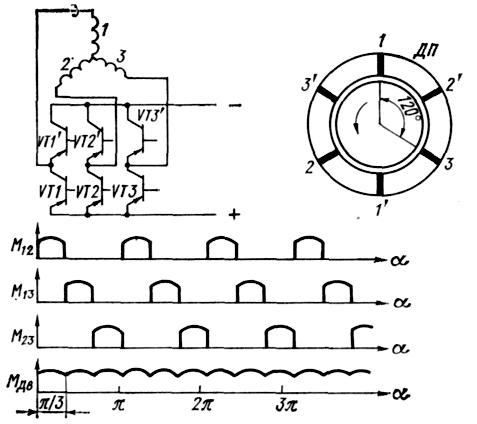
Рис. 15. Реверсивный трехсекционный двигатель с соединением секций в звезду
Трехсекционный двигатель с реверсивным питанием имеет преимущество перед аналогичным двигателем с нереверсивным питанием, обусловленное лучшим использованием меди обмотки и объема активных частей, а также, как правило, более высоким КПД. Однако более сложная схема коммутатора и датчика положения такого двигателя заставляет отдавать ей предпочтение в тех случаях, когда к двигателю предъявляются жесткие требования по габаритным размерам, массе, пульсациям момента и КПД.
Заметим, что трехсекционные схемы с реверсивным питанием можно выполнить на том же коммутаторе и датчике положения при соединении секций в треугольник (замкнутая обмотка). Особенность такой схемы будет состоять в изменении угла установки обоймы чувствительных элементов датчика по отношению к магнитным осям секций двигателя. Если в схеме соединения звездой чувствительные элементы 1, 2, 3 установлены по нормалям к магнитным осям секций, то при соединении секций в треугольник комплект чувствительных элементов должен быть смещен на 30° по отношению к этому положению. По энергетическим показателям и использованию объема двигателя характеристики схем с реверсивным питанием при соединении секций в звезду и треугольник практически равноценны.