

технология бурения 2
.pdfvk.com/club152685050 | vk.com/id446425943
Данный способ управления не предполагает измерения давления нагнетания и не требует специальных датчиков давления, а основан на регистрации скорости или нагрузки приводного двигателя средствами, входящими в штатную систему управления (СУ) буровой установки. При прямом измерении скорости это производится при помощи тахогенератора или иного датчика скорости, напрямую связанного с валом; при косвенном измерении скорости или нагрузки (например, электродвигателя постоянного тока) – через ток и напряжение в якорной цепи по известной взаимосвязи между угловой скоростью и электродвижущей силой (ЭДС) электродвигателя или между крутящим моментом и током.
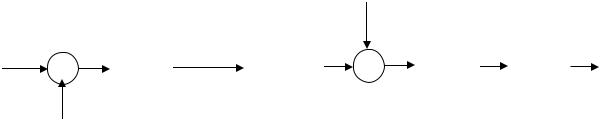
Рис. 10.14. Зависимость тока электродвигателя от параметров режима бурения (крутящего момента ВЗД и расхода бурового раствора)
В отличие от типовых способов управления режимом бурения (через осевую нагрузку или угловую скорость долота), в которых подача промывочной жидкости и нагружение долота функционально производятся независимо друг от друга, в данном случае оптимальный режим работы ЗД поддерживается согласованным управлением БНА и механизмом подачи долота, т.е. осуществляется комплексная автоматизация технологического процесса бурения с объединением двух СУ: буровым насосным агрегатом, обеспечивающим заданный расход промывочной жидкости; механизмом подачи долота на забой, регулирующим его нагрузку, и тем самым задающим момент сил сопротивления на валу ЗД.
Объектом управления становится объединенный комплекс БНА и механизма подачи долота, обеспечивающий необходимую взаимосвязь их функционирования. При этом нагружение долота будет осуществляться с учетом изменения состояния (нагрузки) приводного двигателя насоса.
Пользуясь терминологией теории автоматического управления, структурную схему объекта управления можно представить как последовательное соединение приводного двигателя БНА и механизма подачи долота (рис. 10.15). Выходной сигнал от приводного двигателя у1, пропорциональный угловой скорости или крутящему моменту его вала, поступает на вход механизма подачи долота, где в зависимости от заложенного
169
vk.com/club152685050 | vk.com/id446425943
в систему алгоритма управления происходит выработка необходимого управляющего воздействия х2, регулирующего нагрузку на крюке, и тем самым – режим нагружения долота.
Поскольку в данной системе происходит непрерывная регистрация скорости БНА (частоты ходов насоса), то она может одновременно рассматриваться также и как средство измерения расхода бурового раствора. Следовательно, в широком плане, согласно принятой классификации, можно считать, что управляемым фактором является третий (после частоты вращения и нагрузки на долото) параметр режима бурения – расход жидкости Q.
|
|
|
|
|
|
|
|
|
|
|
|
|
Xза |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Xза |
|
|
|
|
|
|
|
X1 |
|
1 |
|
Y |
|
|
|
X2 |
|
Y1 |
||
|
|
|
Р1 |
Р2 |
2 |
|||||||||||||||
|
|
|
||||||||||||||||||
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.15. Структурная схема системы управления режимом бурения забойным гидродвигателем с переменным перепадом давления: 1 – двигатель бурового насоса; 2 – механизм подачи долота;
Р1, Р2 – регуляторы
В этой связи АСУ режимом бурения (АСУ РБ) с согласованным управлением БНА и механизмом подачи долота может также использоваться:
•для поддержания оптимальной производительности насоса в процессе углубления скважины с учетом гидравлических характеристик забойных исполнительных устройств;
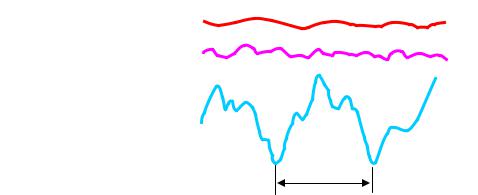
•для реализации оптимальных гидродинамических режимов течения жидкости в скважине (оптимальных частот ходов насоса), обеспечивающих при заданных условиях бурения минимальную неравномерность расхода и давления жидкости по длине напорной линии, что способствует более равномерному вращению вала ЗД (рис. 10.16) и стабилизирует динамический режим системы «ЗД – долото – горная порода».
Подобная АСУ РБ объединяет в себе два направления систем автоматизации (АСУ механизмами и АСУ процессами) и при необходимости может быть дополнена другими информационно-управляющими системами бурового комплекса (например, телеметрической системой контроля траектории ствола скважины).
АСУ РБ может быть реализована в установках, оснащенных РПД как активного (системы РПДЭ), так и пассивного (на базе ТЭП) типа.
170
vk.com/club152685050 | vk.com/id446425943
а
б
в
T
Рис. 10.16. Осциллограммы мгновенной угловой скорости турбины (18/13,5-104,5) при различных состояниях потока жидкости:
а– от центробежного насоса; б – от поршневого насоса
спневмокомпенсатором; в – от поршневого насоса
без пневмокомпенсатора; Т – период двойного хода поршня (стенд РГУ нефти и газа им. И. М. Губкина)
В теоретическом плане сложность создания АСУ РБ забойным двигателем заключается в том, что возмущающие (от забоя) и управляющие (от РПД) воздействия передаются с запаздыванием через волноводы с распределенными параметрами. Это предопределяет необходимость использования в алгоритмах управления прогнозирующих оценок. Кроме того, поскольку объект управления – система с неизвестной, изменяющейся во времени динамической характеристикой, при управлении необходимо использовать методы адаптации.
В общем случае осевая нагрузка на долото G зависит от продольного
усилия в нижнем сечении бурильной колонны длиной L: |
|
ЗА |
(10.14) |
где W – осевая гидравлическая сила на корпусе гидродвигателя от перепада давления в ЗД и долоте с учетом забойного давления в кольцевом пространстве;
GЗA – сила тяжести забойного агрегата;
cosφ – угол отклонения ЗД вертикали (зенитный угол на забое скважины).
В известных способах регулирования нагрузки на долото (табл. 10.1), основанных на поддержании постоянного усилия или скорости верхнего сечения бурильной колонны (N(0) = idem; υ(0) = idem) динамическое состояние системы определяется совместным действием напряжений растяжения (сжатия) и кручения, распределенных по длине колонны.
171
vk.com/club152685050 | vk.com/id446425943
Силовые факторы (продольная нагрузка N и крутящий момент M c учетом E-модуля упругости материала колонны и Sм – площади сечения БК) в заданном сечении колонны х зависят от соответствующих деформа-
ций (du/dх; dφ/dx) от сечения
.
(10.15)
Расчет динамических процессов в колонне труб с учетом совместного действия напряжений сжатия (растяжения) и кручения, распределенных по длине труб, является одной из основных задач при моделировании ДС.
Таблица 10.2 Сравнительные характеристики систем регулирования механизмов
подачи долота при использовании установок с дискретной и непрерывной бурильными колоннами
Показатели |
|
|
|
Тип бурильной колонны |
||||
|
|
Дискретная |
Непрерывная |
|||||
|
|
Установки с |
|
|
Установки с ТЭП |
|
||
|
|
РПДЭ |
|
|
|
|
|
|
Диаметр бурильных |
|
60–168 |
50,8–73,0 |
|||||
труб, мм |
|
|
|
|
|
|
|
|
Толщина стенки |
|
7–11 |
3,0–3,4 |
|||||
труб, мм |
|
|
|
|
|
|
|
|
Масса 1 п.м труб, кг |
|
10,0–44,7 |
3,5–5,8 |
|||||
Тип регулятора по- |
|
Электромеханический (тиросторный |
Гидромеханический |
|||||
дачи долота |
|
преобразователь – электрическая маши- |
(силовой насос- |
|||||
|
|
на – трансмиссия) |
гидромотор- |
|||||
|
|
|
|
|
|
|
|
трансмиссия) |
Основной элемент |
|
Электрическая |
|
|
Тормоз электромаг- |
Гидромотор |
||
|
|
|
||||||
системы регулиро- |
|
машина постоян- |
|
нитный порошковый |
|
|||
вания (ОЭСР) |
|
ного тока |
|
|
|
(ТЭП) |
|
|
Механизм преобразо- |
|
Барабан лебедки |
– талевый механизм |
|
Цепной транспортер – |
|||
|
|
|||||||
вания вращательного |
– элеватор |
|
плашки с гидравличе- |
|||||
движения трансмис- |
|
|
|
|
|
|
ской системой прижи- |
|
сионного (подъемно- |
|
|
|
|
|
|
ма |
|
го) вала в поступа- |
|
|
|
|
|
|
|
|
тельное движение ко- |
|
|
|
|
|
|
|
|
лонны |
|
|
|
|
|
|
|
|
Связь ОЭСР и транс- |
Зубчатый редук- |
|
|
Напрямую при |
|
Цепной (зубчатый) ре- |
||
миссионным (подъ- |
тор – цепная пе- |
|
|
помощи муфты |
|
дуктор |
||
емным) валом уста- |
редача |
|
|
|
|
|
||
новки |
|
|
|
|
|
|
|
|
172
vk.com/club152685050 | vk.com/id446425943
Показатели |
|
|
|
|
Тип бурильной колонны |
|||||
|
|
Дискретная |
|
|
Непрерывная |
|||||
|
|
Установки с |
|
|
Установки с |
|
|
|
||
|
|
РПДЭ |
|
|
ТЭП |
|
|
|
||
Передаточное отно- |
|
56–193 |
|
|
1 |
|
|
|
10–30 |
|
шение между ОЭСР и |
|
|
|
|
|
|
|
|
|
|
трансмиссионным |
|
|
|
|
|
|
|
|
|
|
валом |
|
|
|
|
|
|
|
|
|
|
Возможность возник- |
|
да |
|
|
нет |
|
|
да |
||
новения сжимающих |
|
|
|
|
|
|
|
|
|
|
нагрузок в верхнем |
|
|
|
|
|
|
|
|
|
|
сечении колонны при |
|
|
|
|
|
|
|
|
|
|
ее перемещении |
|
|
|
|
|
|
|
|
|
|
Главная функция |
|
Создание необходимого тормозного |
|
Создание необходимо- |
||||||
ОЭСР |
|
момента на валу |
|
|
го крутящего (прину- |
|||||
|
|
|
|
|
|
|
|
|
|
дительная подача верх- |
|
|
|
|
|
|
|
|
|
|
него конца колонны) |
|
|
|
|
|
|
|
|
|
|
или тормозного момен- |
|
|
|
|
|
|
|
|
|
|
та на валу |
Режим работы ОЭСР |
|
Тормозной (в ре- |
|
Тормозной |
|
|
Двигательный или тор- |
|||
|
|
куперативном ре- |
|
|
|
|
|
мозной |
||
|
|
жиме) |
|
|
|
|
|
|
|
|
Факторы, влияющие |
|
Напряжение элек- |
|
Напряжение |
|
|
Расход жидкости, угло- |
|||
на крутящий момент |
|
трической маши- |
|
возбуждения |
|
|
вая скорость вала |
|||
ОЭСР |
|
ны, угловая ско- |
|
|
тормоза |
|
|
|
||
|
|
рость вала |
|
|
|
|
|
|
|
|
Способ регулирова- |
|
Изменения на- |
|
|
Изменение на- |
|
|
Изменение подачи си- |
||
ния режима работы |
|
пряжения в якор- |
|
пряжением воз- |
|
лового насоса (расхода |
||||
|
|
ной цепи электри- |
|
буждения |
|
|
жидкости) |
|||
|
|
ческой машины |
|
|
|
|
|
|
|
|
Показатель режима |
|
Ток в якорной це- |
|
Ток возбужде- |
|
|
– |
|||
работы системы ре- |
|
пи |
|
|
ния |
|
|
|
||
гулирования |
|
|
|
|
|
|
|
|
|
|
Зависимость про- |
|
|
|
|
|
Нелинейная |
|
|||
дольной нагрузки в |
|
|
|
|
|
|
|
|
|
|
верхнем сечении ко- |
|
|
|
|
|
|
|
|
|
|
лонны от крутящего |
|
|
|
|
|
|
|
|
|
|
момента ОЭСР |
|
|
|
|
|
|
|
|
|
|
Зависимость механи- |
|
|
|
|
|
|
|
|
|
|
ческой скорости про- |
|
|
|
|
|
Линейная |
|
|
||
ходки от угловой ско- |
|
|
|
|
|
|
|
|
|
|
рости ОЭСР |
|
|
|
|
|
|
|
|
|
|
Режимы работы сис- |
|
Циклический нестационарный |
|
Нестационарный (с непре- |
||||||
темы регулирования |
|
(с дискретным увеличением дли- |
|
рывным увеличением дли- |
||||||
при бурении заданно- |
|
ны и веса колонны при наращи- |
|
|
|
ны и веса колонны) |
||||
го интервала |
|
вании) |
|
|
|
|
||||
Возможность исполь- |
|
Да (как ава- |
|
Да (как вспомо- |
|
|
Да (как основной привод) |
|||
зования при СПО |
|
рийный при- |
|
гательный тор- |
|
|
|
|
||
|
|
вод) |
|
|
|
моз) |
|
|
|
|
|
|
|
|
|
|
|
|
|
173 |
|
vk.com/club152685050 | vk.com/id446425943
Показатели |
|
Тип бурильной колонны |
|
|
Дискретная |
Непрерывная |
|
|
Установки |
Установки |
|
|
с РПДЭ |
с ТЭП |
|
Возможность уста- |
Да/Нет |
Нет |
Да |
новления скорости |
|
|
|
движения колонны |
|
|
|
независимо от нагруз- |
|
|
|
ки |
|
|
|
Степень сложности |
Средняя |
Низкая |
Высокая |
управления |
|
|
|
Тип управления ре- |
Активный |
Пассивный |
Активный |
жимом движения ко- |
|
|
|
лонны |
|
|
|
Стабильность харак- |
Высокая |
Средняя (изме- |
Высокая |
теристик системы ре- |
|
нение свойств |
|
гулирования |
|
порошка) |
|
Изменение нагрузки |
Да |
Нет |
Да |
на долото при изме- |
|
|
|
нении свойств прохо- |
|
|
|
димых горных пород |
|
|
|
Приведенный к валу |
Средняя |
Высокая |
Низкая |
ОЭСР момент инер- |
|
|
|
ции |
|
|
|
Длительность пере- |
Средняя |
Большая |
Малая |
ходных процессов |
|
|
|
(время регулирова- |
|
|
|
ния) |
|
|
|
Масса поступательно |
5000–15000 |
– |
|
движущихся частей |
|
|
|
механизма, связанных |
|
|
|
с верхним сечением |
|
|
|
колонны, кг |
|
|
|
В идеализированном стационарном режиме углубления забоя (υ(0) =
υк = υ(L) = υM) продольные усилия в верхнем и нижнем сечении бурильной |
|
колонны, которые определяют соответственно усилие на крюке Gкр и на- |
|
грузку на долото G, отличаются на величину продольной составляющей |
|
силы тяжести труб Gбк с учетом действия суммарной силы трения колонны |
|
о стенки скважины Fтр. 0 бк тр |
(10.16) |
Сила трения Fтр является трудноопределимой переменной процесса бурения, существенное значение и неопределенность которой в наклонных и горизонтальных скважинах затрудняет доведение осевой нагрузки до забоя и поддержание заданного режима работы ЗД.
174
vk.com/club152685050 | vk.com/id446425943
Впроцессе бурения (углубления забоя) нарушение установившегося динамического режима движения колонны может произойти вследствие:
•изменения механических свойств горных пород ( Муд; Δβ), что приведет к изменению скорости проходки, гидравлической силы и крутящего момента ЗД, а также угла закручивания колонны;
•непостоянства расхода промывочной жидкости, что будет сопровождаться изменением частоты вращения ЗД и гидравлической силы;
•зашламления затрубного пространства с соответствующим увеличением выталкивающей силы и, соответственно, снижением гидравлического усилия W;
•изменения сил трения колонны о стенки скважины или перехода к новой форме пространственного положения колонны, что приведет к перераспределению продольных и крутильных нагрузок по длине колонны.
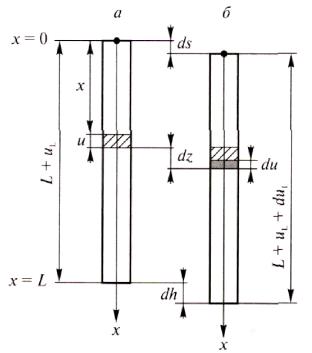
Вреальном нестационарном режиме подачи колонны с использованием ленточного тормоза лебедки или РПД мгновенные значения скоростей верхнего ds/dt и нижнего dh/dt сечений из-за непрерывного выбуривания забоя скважины неодинаковы (рис. 10.17), а уравнение (10.18) не отражает особенности динамических процессов в протяженной колонне труб, поскольку силовые факторы в различных сечениях становятся зависимыми от волновых процессов (du/dх; dφ/dx = νar).
Если принять, что изменение деформации всех сечений колонны одинаково (модель пружины), то зависимость мгновенных скоростей v(0) и v(L) концевых сечений колонны по длине L приводится к приближенному
виду |
0 = |
+ |
. |
|
|
(10.17) |
Качество функционирования ДС ВЗД и выбор оптимальных алгоритмов управления зависит от точности определения коэффициентов передачи:
– гидродвигателя:
– бурового насосного агрегата= :
–системы «бурильная колонна – ЗД – горная порода»:
= ,Ψ = , = ;
(10.18)
(10.19)
(10.20)
175
vk.com/club152685050 | vk.com/id446425943
– системы «долото – горная порода»: |
; |
|
|
|
= уд = |
(10.21) |
|
где Муд – удельный момент на долоте, кН·м/кН; |
|
||
– системы в целом: |
П = , |
|
|
|
|
(10.22) |
|
где Y – параметр регулирования (G, ω, М, Р, I); U – управляющее воздействие;
G – нагрузка на долото; ω – частота колонны; М – момент на двигателе;
Р – давление в нагнетательной линии; I – ток электродвигателя.
Рис. 10.17. К расчету деформации и скорости сечения протяженной бурильной колонны: а – в момент времени t; б – в момент времени t + dt; ν(0) = ds/dt; ν(L) = dh/dt; dz – мгновенное перемещение сечения относительно неподвижной системы координат
Определяющее значение для проектирования АСУ РБ имеет моделирование волновых процессов, происходящих в протяженных волноводах, связывающих забой и устье бурящейся скважины.
Как известно, продольно-крутильные колебания существенно влияют на динамическое состояние системы, процесс передачи нагрузки
176
vk.com/club152685050 | vk.com/id446425943
на забой, показатели отработки долот, долговечность бурильного инструмента и ЗД. В этой связи аналитические (с использованием современного арсенала численных методов) и экспериментальные исследования взаимосвязи волновых процессов в бурильной колонне и ее напорной линии, описывающихся подобными дифференциальными уравнениями второго порядка и распространяющихся с тремя различными скоростями (с = 1,2…1,5 км/с; сu = 5,1 км/с; сφ = 3,2 км/с), являются весьма актуальными при оптимизации режимов бурения и управления ЗД.
Скорость распространения колебаний по столбу жидкости (с) и ко-
лонне труб (сu, сφ) определяет время запаздывания распространения воз- |
||
мущающих и управляющих сигналов: |
|
|
• |
по столбу жидкости: t = l/с; |
|
• |
по колонне труб (продольные колебания): |
tu = L/сu; |
• |
по колонне труб (крутильные колебания): |
tφ = L/сφ, |
где L, l – соответственно длина бурильной колонны и протяженность напорной линии (от насоса до ЗД).
Колебательные процессы в напорной линии, влияющие на равномерность вращения ЗД и качество функционирования телеметрических систем с гидравлическим каналом связи, зависят от сочетания двух критериев по-
добия: |
Н ; |
|
– частотного: |
|
|
– акустического: |
(10.23) |
|
и |
|
|
|
(10.24) |
Динамические и переходные характеристики системы также зависят от приведенного момента инерции J или постоянной времени τ гидродвигателя и других элементов системы (БНА, лебедки, РПД).
При определении инерционных параметров ВЗД необходимо учитывать особенности кинематики планетарного движения его рабочих органов.
При выборе оптимальных параметров цифрового ПИД-регулятора (шага управления ty, коэффициента пропорциональности крег, постоянных интегрирования Tи и дифференцирования Tд) помимо параметров отдельных элементов необходимо определить постоянную времени системы. Ее можно рассчитать по переходным характеристикам, которые снимаются как экспериментально (на объекте), так и аналитически на основе математического моделирования с учетом транспортного (в звеньях с распределенными параметрами) и инерционного запаздывания.
177
vk.com/club152685050 | vk.com/id446425943
Тогда в процессе бурения с использованием АСУ РБ текущее изменение управляющего воздействия определяется в зависимости от отклонения параметра регулирования ( Y = Y – Yзад) и ее первой (dY) и второй (d2Y) производных с учетом упреждения на транспортное за-
паздывание |
t*: |
|
рег и + + + + д + (10.25) |
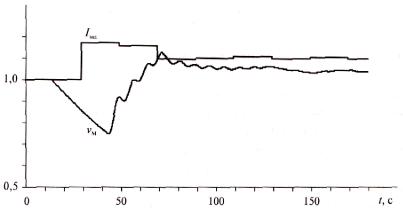
Для управления режимом бурения, отличающимся непрерывным воздействием различных возмущающих факторов, целесообразно использовать адаптивные алгоритмы управления, в которых координата задания Yзад рассматривается как переменная величина (рис. 10.18), зависящая от состояния системы, идентифицируемого по показаниям датчиков и прогнозируемого на основе «дерева» возможного развития процесса. Подобная адаптивная АСУ приобретает свойства интеллектуальной системы управления нового поколения с гибкими процедурами принятия решения и самонастройки параметров.
Рис. 10.18. Изменение механической скорости бурения νм и тока задания Iзад при реакции цифровой АСУ РБ на скачок давления в затрубном пространстве
Особенностью АСУ РБ с использованием РПД на базе электропорошкового тормоза является ее несимметричная реакция на увеличение (+ U) и сброс (– U) напряжения тормоза, что объясняется продолжением выбуривания породы и постепенным снижением нагрузки на долото при затормаживании барабана лебедки, поскольку в пассивных РПД приподъем инструмента или обратное вращение подъемного вала невозможны.
При управлении режимом бурения гидродвигателя с переменным перепадом давления необходимо учитывать гидромеханические эффекты в системе с положительной обратной связью (бурильная колонна – ВЗД –
178