

технология бурения 2
.pdfvk.com/club152685050 | vk.com/id446425943
зонтальной скважины обеспечивается станциями ГТИ. Выпускается достаточно большое их количество. Наиболее широкое применение нашли станции АМТ-121, Мега-АМТ компании ООО «АМТ» и АПК «Волга», а также Геотест-5 компании ОАО НПФ «Геофизика».
Например, программный комплекс станции ГТИ Мега-АМТ компании ООО «АМТ» (рис. 10.9) предполагает получение практически полной картины процесса бурения, работы датчиков наземного и скважинного оборудования.
Рис. 10.9. Информативность станции ГТИ Мега-АМТ
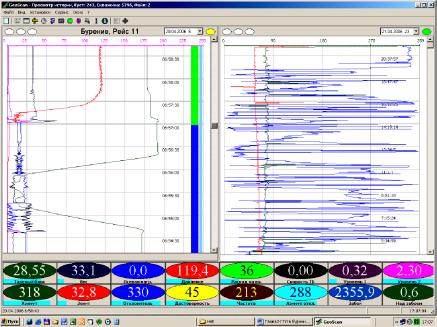
Для обработки информации работы устьевого и внутрискважинного оборудования, а именно управления режимом бурения, большинство предприятий Западной Сибири и Севера Тюменской области используют программный комплекс GeoScan 2.0 (рис. 10.10).
159
vk.com/club152685050 | vk.com/id446425943
Практически все используемые программные комплексы в составе вышеперечисленных станций ГТИ обеспечивают решение следующих задач:
•автоматический приём сигналов технологических датчиков, аппаратуры газового каротажа, забойной инклинометрической системы, ввод справочной информации;
•автоматическая обработка принятых сигналов, интерпретация полученной информации;
•контроль процесса бурения: углубление забоя, спуско-подъемные операции (СПО) с контролем долива скважины, цементирования;
•выделение в процессе бурения литологического разреза, пластовколлекторов, зон аномально высоких пластовых давлений (АВПД), определение пластового давления в процессе бурения и прогноз пластового давления;
•определение параметров газового каротажа и прогноз продуктивности пластов-коллекторов;
•построение уточненного геологического разреза по данным, полученным в процессе бурения и исследования шлама и керна (ввод данных, расчеты, печать стратиграфолитологического разреза, шламограммы, карбонатограммы, результатов люминисцентнобитуминологического и др. анализов шлама и керна, результатов механического, фильтрационного и газового каротажа);
•контроль и прогноз траектории ствола скважины;
•выполнение расчетов при решении геологических и технологических задач проводки скважины;
•визуализация всей полученной по скважине информации на экране монитора;
•накопление и хранение всей полученной по скважине информации;
•формирование и печать отчетной документации по скважине;
•копирование информации по скважине для ее последующей обработки в центрах сбора, обработки, интерпретации информации по скважинам.
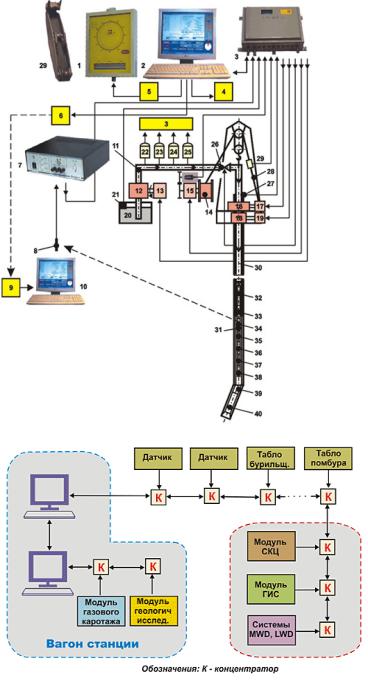
На рисунке 10.11 представлена схема станции ГТИ и состав АПК «Волга».
Представленная схема включает как наземные, так и забойные системные модули, а также датчики контроля работы устьевого и глубинного оборудования.
Датчики технологических параметров, используемые в станциях ГТИ, являются одной из самых важных составных ее частей.
160
vk.com/club152685050 | vk.com/id446425943
Рис. 10.10. Программный комплекс ГТИ GeoScan 2.0
По функциональному назначению они могут быть разделены на такие группы:
1.Датчики, характеризующие технологический процесс бурения (перемещения талевого блока; веса инструмента; частоты вращения ротора; момента на роторе; момента на машинном ключе; давления промывочной жидкости; расхода; уровня в емкостях).
2.Датчики свойств промывочной жидкости (плотности, вязкости, объемного газосодержания, температуры, минерализации).
3.Газоаналитическая аппаратура, к которой относятся дегазаторы промывочной жидкости, суммарные газоанализаторы (индикаторы горючих газов) и хроматографы.
4.Аппаратура и оборудование для анализа образцов горных пород, флюидов и промывочной жидкости (геологическая кабина). Информация от датчиков, как правило, поступает непрерывно от га-
зоаналитической аппаратуры – как в непрерывном, так и в дискретном (хроматограф) режимах, в то время как данные от приборов геологической службы всегда дискретны, так как связаны с анализом отдельно взятых проб.
В цифровых и компьютеризированных ГИС после аналогоцифрового преобразования вся непрерывная информация представляется множеством дискрет, количество которых определяется временем опроса датчиков, пропускной способностью каналов связи, которых, однако, должно быть достаточно для полного восстановления исходного сигнала, полученного от датчика с аналоговым выходом.
161
vk.com/club152685050 | vk.com/id446425943
Рис. 10.11. Схема станции ГТИ и состав АПК «Волга»:
1 – пульт бурильщика; 2 – ПК оператора; 3 – УСО «Волга»; 4 – принтер; 5 – блок сопряжения; 6 – модем ПК оператора; 7 – приемное устройство; 8 – антенна приемного устройства; 9 – модем удаленного ПК; 10 – удаленный ПК; 11 – нагнетательная линия
насосов; 12 – насос; 13 – привод насоса; 14 – лебедка; 15 – привод лебедки; 16 – ротор;
17 – привод ротора; 18 – превентор; 19 – привод превентора; 20 – бак с буровым раствором; 21 – датчик уровня бурового раствора; 22 – датчик давления; 23 – датчик расхода; 24 – датчик плотности; 25 – датчик наличия газовых включений; 26 – управляющий клапан; 27 – газоанализатор; 28 – трос; 29 – индикатор веса на крюке; 30 – колонна бурильных труб; 31 – забойная телеметрическая система; 32 – пульсатор ГКС; 33 – источник питания;
34 – передающий модуль;
35 – датчик оборотов турбины;
36 – датчик крутящего момента;
37 – датчик осевой нагрузки;
38 – блок инклинометрии;
39 – отклоняющая компоновка;
40 – забойный двигатель;
41 – датчик перемещения колонны бурильных труб
По степени обработки исходной информации датчики можно условно подразделить на группы:
–датчики, преобразование сигналов которых до уровня унифицированных производится на вторичных измерительных пультах (панелях);
–датчики, преобразование сигналов которых до уровня унифицированных производится на месте (в самом датчике);
162
vk.com/club152685050 | vk.com/id446425943
–интеллектуальные (микропроцессорные) датчики, в которых первичный измерительный сигнал преобразуется в кодовый (цифровой) сигнал, способный транслироваться по общей линии связи непосредственно на вход персонального компьютера;
–измерительные системы (в т.ч. и автономные), в которых производятся сложные функциональные преобразования с помощью современных средств микропроцессорной техники (примером может являться аппаратура виброакустического каротажа с радиоканалом, в которой с помощью сигнального процессора производится Фурье-преобразование от 3-компонентного акселерометра, устанавливаемого на вертлюге буровой установки). Данная аппаратура рекомендуется в качестве дополнительной
всоставе ГИС, ГТИ для исследования разрезов сложных скважин (поисковые, горизонтальные и т.п.).
От точности показаний и надежности работы датчиков во многом зависит эффективность службы ГТИ при решении задач по контролю и оперативному управлению процессом бурения. Однако из-за тяжелых условий эксплуатации (широкий диапазон температур: от –50 до +50 ºС, агрессивная среда, сильные вибрации и т.д.) датчики остаются самым слабым и ненадежным звеном в составе технических средств ГТИ.
Применяемые в производственных партиях ГТИ датчики в большинстве своем были разработаны в начале 90-х годов с использованием отечественной элементной базы и первичных измерительных элементов отечественного производства, причем из-за отсутствия выбора использовались общедоступные первичные преобразователи, которые не всегда отвечали жестким требованиям работы в условиях буровой. Этим объясняется недостаточно высокая надежность применяемых датчиков.
Исследования функциональных способностей станций ГТИ показал, что они могут решать комплекс геологических и технологических задач, направленных на достижение оптимальных технико-экономических показателей, путем оперативного выделения в разрезе перспективных пластовколлекторов, изучения выделенных объектов, а также частично решать задачи, направленные на оптимизацию режима бурения с обеспечением безаварийной проводки скважин.
Опыт их использования выявил ряд проблем, связанных с оперативностью: корректировки траектории ствола горизонтальной скважины; получения информации от глубинных приборов, сигналы которых достигают наземных приемников, позволяющих выдавать достаточно точную информацию о режиме углубления забоя и состоянии элементов КНБК в условиях скважины в кратчайшие сроки.
Частичное решение проблемы оперативной корректировки режимов бурения возможно на основе применения современных бортовых вычислительных комплексов и соответствующего программно-методического обеспечения.
163
vk.com/club152685050 | vk.com/id446425943
В последние годы за рубежом интенсивно развиваются системы ГТИ, позволяющие получать информацию с забоя непосредственно в процессе бурения с помощью телеметрических забойных систем (ТЗС) МWD и LWD. В нашей стране ТЗС под шифром «Забой» разрабатываются во ВНИИГИС. Их освоение началось в 1996 г.
Автоуправление траекторией скважины (приводом ротора) предусматривает создание системы автоматического управления траекторией ствола наклонно направленной скважины по углу и азимуту с использованием ТЗС типа ЗИС-4 (ЗИТ-l), которые выдают информацию о фактических параметрах траектории ствола скважины через каждые 20…30 с.
Они позволяют использовать одну универсальную компоновку низа бурильной колонны (КНБК) с кривым переводником, как для набора кривизны, так и на участке стабилизации. При этом, когда идет набор кривизны, ротор неподвижен (колонна не вращается), за счет чего и осуществляется набор кривизны. Однако при этом автоматическая система управления должна осуществлять доворот ротора на необходимый угол в нужном направлении за счет сигнала рассогласования между проектными и фактическими данными о траектории ствола скважины. После набора нужного угла и азимута участок стабилизации может быть обеспечен путем медленного вращения колонны ротором. При этом дополнительно появляется возможность измерения момента на роторе как технологического параметра.
Телесистемы, объединенные с поверхностными системами ГТИ, образуют сложные компьютеризированные многопроцессорные приборные комплексы, предназначенные для получения комплексной геологотехнологической и геофизической информации в процессе бурения скважин. Созданием как ТЗС, так и комплексных скважинных систем занимаются десятки зарубежных фирм, в том числе и традиционно геофизические, такие как «Шлюмберже», «Халибертон» и др.
Также в составе ГТИ используются аппаратурно-методические комплексы автономных забойных систем (АЗС). АЗС представляют собой встраиваемые или сбрасываемые в КНБК приборные комплексы на современной элементной базе, регистрирующие в процессе спуска инструмента, бурения и подъема инструмента траекторные параметры скважины (угол, азимут, угол установки отклонителя), технологические параметры процесса бурения (нагрузка на долото, момент на долоте, обороты долота, давление в трубах и затрубье, температура в трубах и затрубье, амплитуда и частота вибраций и др.), параметры свойств горных пород (естественная гамма-активность, сопротивление на различных зондах и др.).
Использование результатов ГТИ для совершенствования технологии бурения, оптимизации и автоматизации процесса бурения может быть разбито на три самостоятельных направления: оперативные рекомендации, рекомендации на основе статистической обработки накопленной инфор-
164
vk.com/club152685050 | vk.com/id446425943
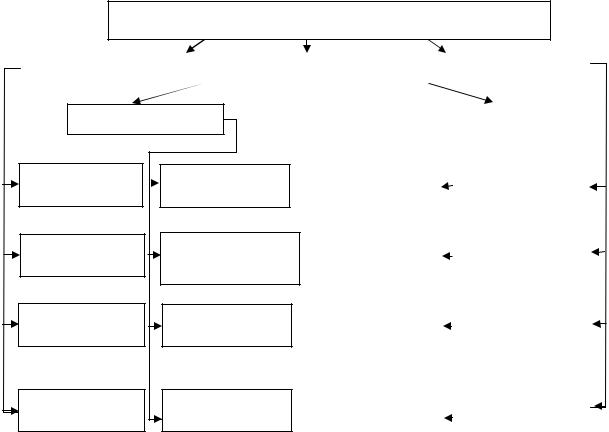
мации и оперативное управление. На рисунке 10.12 представлена схема ГТИ для совершенствования технологии, оптимизации и автоматизации бурения.
Оперативные рекомендации по контролю и управлению бурением скважин можно разделить на рекомендации по оптимизации режима бурения – оперативному управлению, отработке долот, поддержанию свойств промывочной жидкости, предотвращению аварийных ситуаций.
ИСПОЛЬЗОВАНИЕ ГТИ ДЛЯ СОВЕРШЕНСТВОВАНИЯ ТЕХНОЛОГИИ БУРОВЫХ РАБОТ, ОПТИМИЗАЦИИ И АВТОМАТИЗАЦИИ
Оперативные рекомендации |
|
Рекомендации на основе статобработки |
|
Оперативное управление |
|
|
накопленной информации |
|
|
|
|
|
|
|
НА БУРОВОЙ |
|
по оптимизации ре- |
по стратегии углубле- |
жима бурения |
ния скважины |
по отработке долот |
по корректировке режи- |
|
мов на основе предыду- |
|
щего долбления |
по свойствам ПЖ |
по прогнозу траектории |
|
скважины |
по предотвращению |
по мониторингу работы |
аварийных ситуаций |
бурового оборудования |
|
|
|
|
|
НА МЕСТОРОЖДЕ- |
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
при составлении груп- |
|
|
|
автоуправление буро- |
|
|||
|
|
повых проектов |
|
|
|
вым инструментом |
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
при составлении карт |
|
|
|
автоуправление траек- |
|
|||
|
|
режимов бурения обра- |
|
|
|
торией, ротором |
|
|||
|
|
ботки ПЖ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при составлении ГТН |
|
|
|
автоуправление насо- |
||||
|
|
|
|
|
|
|
|
сами |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
по профилю скважины |
|
|
|
автоуправление шла- |
||||
|
|
и инклинометрии |
|
|
|
мовыми насосами |
||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.12. Использование данных ГТИ для совершенствования технологии, оптимизации и автоматизации буровых работ
Оперативное управление режимом бурения, а именно контроль осевой нагрузки на долото, осуществляется: автоуправлением подачей бурового инструмента (регуляторами подачи долота – РПД, блоками автоматического управления осевой нагрузкой на долото – БАУ и др.); автоуправлением приводом ротора; автоуправлением привода буровых насосов (использование параметров состояния приводного двигателя бурового насосного агрегата – БНА в сочетании с РПД); по величине момента двигателя, исходя из определения (регистрации) разницы перепадов давления в двигателе при его работе в рабочем режиме и в режиме холостого хода; тензодатчиками (устанавливаемые в немагнитном переводнике над двигателем).
165
vk.com/club152685050 | vk.com/id446425943
Наиболее актуальными (первоочередными) задачами оперативного управления режимом бурения являются:
1)автоуправление подачей бурового инструмента;
2)автоуправление приводом ротора;
3)автоуправление работой шламовых насосов, доливом скважины;
4)автоуправление приводом буровых насосов.
Известные устройства автоматизации подачи бурового инструмента
– регуляторы подачи РПД-3, СВМ и др. не нашли применения в практике проведения буровых работ в условиях Западной Сибири по ряду причин:
1.Небольшой диапазон реализации механической скорости (до 60–
100 м/ч).
2.Невозможность применения в условиях часто перемежающегося тонкослоистого разреза с резко различными по механическим свойствам породами и сильного искривления ствола скважины.
3.Невозможность осуществления автоматического поиска и поддержания оптимального значения нагрузки для каждой разбуриваемой литологической разности пород без перерыва бурения.
Исходя из этого ОПМ-I0 управления «Запсибнефтегеофизика» в 1981 году был создан действующий макет блока автоматического управления осевой нагрузкой на долото, успешно опробованный на скважинах Самотлорского месторождения.
Блок автоматического управления осевой нагрузкой на долото (БАУ) предназначен для автоматического управления электромагнитным ферропорошковым тормозом ТЭП-4500, входящим в комплекс буровой установки, для регулирования осевой нагрузки на долото при бурении скважин. Блок предусматривает возможность работы при спуско-подъемных операциях. В данном случае он выполняет функции ограничителя скорости при спуске бурового инструмента и обсадной колонны, задаваемой бурильщиком. БАУ осуществляет автоматический поиск и регулирование оптимальной нагрузки на буровой инструмент в зависимости от изменения механической скорости бурения. Диапазон изменения механической скорости бурения – от 2 до 100 м/ч; диапазон регулирования осевой нагрузки на долото – от 5 до 150 кН.
Всостав БАУ входят:
1)узел измерения и регистрации текущего значения угловой скорости вращения барабана лебедки буровой установки;
2)датчик контроля величины натяжения талевого каната буровой установки (датчик нагрузки на крюк);
3)электронная исполнительная часть;
4)комплект соединительных кабелей;
5)источник питания.
Впроцессе работы БАУ сигнал с датчика веса поступает на узел определения периода колебаний бурильной колонны. За время периода коле-
166
vk.com/club152685050 | vk.com/id446425943
баний производится измерение и суммирование мгновенных скоростей бурения. Сигналы, пропорциональные скорости бурения, вырабатываются датчиком скорости. Далее определяется отношение суммы мгновенных скоростей к периоду колебаний, т.е. средняя механическая скорость за период. Значение средней скорости в цифровом видео отсылается в память, и одновременно производится сравнение средней скорости за текущий период (ТП) и за предыдущий. В результате сравнения вырабатывается сигнал, знак которого соответствует требуемому направлению изменения нагрузки (увеличению или уменьшению) с точки зрения увеличения механической скорости бурения. Данный сигнал после формирования поступает на узел управления тиристором и изменяет ток через катушку ТЭП-4500, т.е. производится регулирование осевой нагрузки на долото.
Процесс регулирования производится каждый раз по окончании периода колебаний бурильной колонны, т.е. в течение всего времени нахождения долота на забое, чем обеспечивается близкий к оптимальному режим бурения скважины.
В ходе отработки составных частей блока автоматического управления осевой нагрузкой на долото и проведения промысловых испытаний БАУ Э. Е. Лукьяновым определены зависимости изменения во времени мгновенной механической скорости и нагрузки на крюке таль-блока, а также получено соответствие экспериментальных зависимостей зависимостям, рассчитанным для движения механического аналога. Отмечено, что разность между оптимальной по механической скорости нагрузкой на долото и нагрузкой, вызывающей остановку забойного двигателя, для некоторых горных пород невелика и составляет всего 15…20 кН. Также отмечено появление ошибочных управляющих воздействий, вызванных неправильным определением времени усреднения мгновенной механической скорости из-за низкого уровня сигнала тензометрического датчика натяжения талевого каната и присутствия электрических помех в линии передачи сигнала.
Неразрывно с системой автоматического управления подачей инструмента в практику буровых работ внедрено автоуправление приводом буровых насосов.
Автоуправление приводом буровых насосов приобретает актуальность в связи с появлением на промыслах буровых насосов с регулируемым приводом. Возможность оптимизации бурения ВЗД по расходу значительно расширит его возможности по выбору рациональных режимов бурения для различных сочетаний «долото – ВЗД» для пород с меняющимися механическими свойствами.
Для управления режимом бурения целесообразно (с точки зрения автоматизации процесса и надежности системы) использовать параметры состояния приводного двигателя бурового насосного агрегата (БНА). В зависимости от типа используемого приводного двигателя, который может
167
vk.com/club152685050 | vk.com/id446425943
быть электрическим, дизельным или газотурбинным, параметры его состояния соответственно могут быть механическими, электрическими или термодинамическими.
В1994 г. в РГУ нефти и газа им. И. М. Губкина был предложен способ управления режимом работы ВЗД по реакции (отклику) приводного двигателя бурового насоса на изменение нагрузки на его валу при отклонении крутящего момента ЗД от заданного.
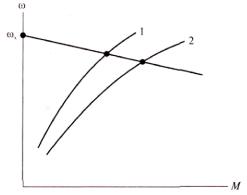
Вобщем случае в качестве параметра регулирования может быть выбрана угловая скорость или крутящий момент приводного двигателя насоса (рис. 10.13), в случае применения электроприводных БНА – ток электродвигателя (рис. 10.14) или температура его обмоток.
Способ базируется на характеристиках системы, выраженных детерминированными зависимостями:
•перепада давления Р и крутящего момента М гидродвигателя;
•давления Рн и крутящего момента Мн бурового насоса;
•угловой скорости и крутящего момента привода Мпр (тока и крутящего момента электродвигателя).
Рис. 10.13. Совмещенные механические характеристики электродвигателя постоянного тока и бурового насоса: 1 – холостой режим ВЗД; 2 – рабочий режим ВЗД
При изменении нагрузки на валу забойного гидродвигателя, вызванном изменением нагрузки на долото, через функциональную цепочку G – М – Р – Рн – Мн – Мпр происходит соответствующее изменение скорости или тока приводного двигателя БНА.
Таким образом, по изменению скорости или тока приводного двигателя насоса можно косвенно отслеживать режим работы гидродвигателя с переменным перепадом давления и на основе этой информации управлять процессом бурения, не используя информацию с забоя и показания индикатора веса. В этом случае приводной двигатель насоса становится средством диагностики режима бурения (распознавания технологической ситуации в процессе бурения).
168