

Пневматические и гидравлические исполнительные механизмы.
Пневматические и гидравлические исполнительные механизмы, использующие энергию сжатого воздуха и минеральных масел (несжимаемой жидкости), делят на самостоятельные и на работающие совместно с усилителями. Так как принцип действия этих двух видов механизмов схож между собой, рассмотрим их совместно.
К самостоятельным механизмам относят цилиндры с поршнем и штоком одно- и двустороннего действия.
Исполнительные механизмы, объединенные с усилителями, имеют различные конструктивные решения, часть из которых рассмотрим ниже.
Основным в таком приводе является регулирование скорости движения штока, выполняемое с дроссельным или объемным регулированием.
При управлении с дроссельным регулированием используют золотниковые распределители или «сопло заслонку». Работа гидропривода с дроссельным регулированием позволяет изменять величину перекрытия отверстий (т. е. дросселировать), через которые жидкость попадает в рабочий цилиндр (рис. 1, а). Перемещение золотниковой пары вправо позволяет маслу из напорной линии через канал попасть в полость А рабочего цилиндра и поршень будет перемещаться вправо. При этом масло, находящееся в полости Б, будет сливаться через канал в бак. Перемещение золотника влево переместит в ту же сторону и поршень, а отработавшее масло будет сливаться из полости А в бак через канал. При расположении золотниковой пары в среднем положении (так, как показано на рисунке) оба канала, соединяющих золотниковое устройство с рабочим цилиндром, перекрыты и поршень неподвижен.
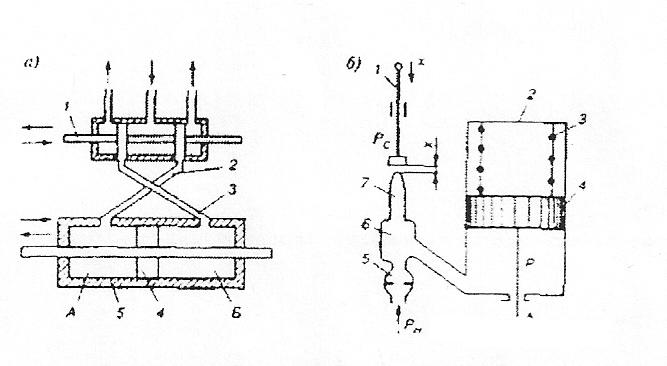
Рисунок 1. Поршневые исполнительные механизмы с усилителями
 Работа
пневмопривода с помощью «сопло-заслонки»
(рис.1, б) производится путем изменения
давления в рабочем цилиндре и перемещения
поршня на величину у за счет перемещения
регулируемой заслонки. Через дроссель
постоянного сопротивления воздух
подается в камеру под постоянным
давлением Рн. В то же время давление в
камере зависит от расстояния х между
соплом (дросселем переменного
сопротивления) и заслонкой, так как с
увеличением этого расстояния давление
снижается и наоборот. Воздух под давлением
Р поступает из камеры в нижнюю полость
цилиндра, а в верхней расположена
пружина, создающая за счет силы упругой
деформации противоположное давление,
равное Рн. Созданная разность давлений
позволяет перемещать поршень вверх или
вниз. Вместо пружины в цилиндр может
подаваться воздух или рабочая жидкое!ь
под давлением Рн. В соответствии с этим
поршневые исполнительные механизмы
называются механизмами одно-или
двустороннего действия и обеспечивают
усилия до 100 кН при перемещении поршня
до 400 мм.
Работа
пневмопривода с помощью «сопло-заслонки»
(рис.1, б) производится путем изменения
давления в рабочем цилиндре и перемещения
поршня на величину у за счет перемещения
регулируемой заслонки. Через дроссель
постоянного сопротивления воздух
подается в камеру под постоянным
давлением Рн. В то же время давление в
камере зависит от расстояния х между
соплом (дросселем переменного
сопротивления) и заслонкой, так как с
увеличением этого расстояния давление
снижается и наоборот. Воздух под давлением
Р поступает из камеры в нижнюю полость
цилиндра, а в верхней расположена
пружина, создающая за счет силы упругой
деформации противоположное давление,
равное Рн. Созданная разность давлений
позволяет перемещать поршень вверх или
вниз. Вместо пружины в цилиндр может
подаваться воздух или рабочая жидкое!ь
под давлением Рн. В соответствии с этим
поршневые исполнительные механизмы
называются механизмами одно-или
двустороннего действия и обеспечивают
усилия до 100 кН при перемещении поршня
до 400 мм.
При управлении с дроссельным регулированием входным управляющим сигналом является величина перемещения золотниковой пары или открытия дросселя, а выходным — перемещение поршня в гидроцилиндре.
Гидро- и пневмопривод обеспечивают объекту управления возвратно-поступательное и вращательное движение.
При управлении с объемным регулированием управляющими устройствами являются насосы переменной производительности, выполняющие и функции усилительно-исполнительного механизма. Входным сигналом является подача насоса. Большое распространение в качестве гидравлического исполнительного механизма имеют аксиально-поршневые двигатели, обеспечивающие плавное изменение угловой скорости выходного вала и количества подаваемой жидкости. Пневматические исполнительные механизмы
В качестве исполнительных механизмов в пневматических системах применяются поршневые и мембранные пневмоприводы.
Поршневые отличаются от мембранных большей величиной перемещения рабочего органа и большим развиваемым усилием. Применяются они редко. Исполнительные пневматические механизмы предназначены для преобразования входного сигнала давления, поступающего от регулирующего или командного прибора, в перемещение регулирующего органа, который изменяет приток или сток вещества или энергии в объект управления. Всякий исполнительный пневматический механизм состоит из привода, воспринимающего командный сигнал давления, и регулирующего органа. Исполнительные механизмы, входящие в системы автоматического регулирования, должны развивать достаточные перестановочные усилия для преодоления сил, противодействующих перемещению регулирующего органа на всем диапазоне перемещений, обладать детектирующими свойствами, иметь чувствительность, люфт и гистерезис, соизмеримые с аналогичными показателями других элементов системы. По принципу действия исполнительные пневматические механизмы делят на механизмы поступательного движения, вращательного движения и струйные. В свою очередь механизмы поступательного движения делят на поршневые, мембранные и сильфонные, а механизмы вращательного движения - на шестеренчатые, лопастные и поршневые.