4. Порядок выполнения работы. Графическая часть и пояснительная записка
4.1. Исходные данные для проектирования
Для выполнения курсовой работы студентам выдается индивидуальное задание, которое содержит следующие данные:
![]() –
наибольший ход
ползуна, м;
–
наибольший ход
ползуна, м;
– отношение длины кривошипа к длине шатуна;
![]() 1–
частота вращения кривошипа, об/мин;
1–
частота вращения кривошипа, об/мин;
– масса ползуна, кг;
![]() – усилие сопротивления
на ползуне в виде графика;
– усилие сопротивления
на ползуне в виде графика;
![]() – угол поворота
кривошипа, определяющий положение
механизма, в котором производится
построение планов;
– угол поворота
кривошипа, определяющий положение
механизма, в котором производится
построение планов;
Обычно расчеты
делаются для
![]() положений механизма
положений механизма
![]() .
Точность вычислений - четыре значащие
цифры. Единицы измерения соответствуют
системе СИ.
.
Точность вычислений - четыре значащие
цифры. Единицы измерения соответствуют
системе СИ.
4.2. Содержание и порядок кинематического расчета (I этап)
а) определение размеров механизма:
радиус кривошипа
![]() ; длина шатуна
; длина шатуна
![]() .
(49)
.
(49)
По полученным
размерам вычерчивается в масштабе схема
механизма в положении
![]() (рис.2).
(рис.2).
б) расчет перемещений, аналогов скоростей и ускорений ползуна.
Производится по зависимостям (4), (5), (9), (10) или по приближенным зависимостям (13), (14), (15).
в) построение кинематических диаграмм.
Строятся для наглядного представления о характере изменения кинематических параметров (рис. 10).
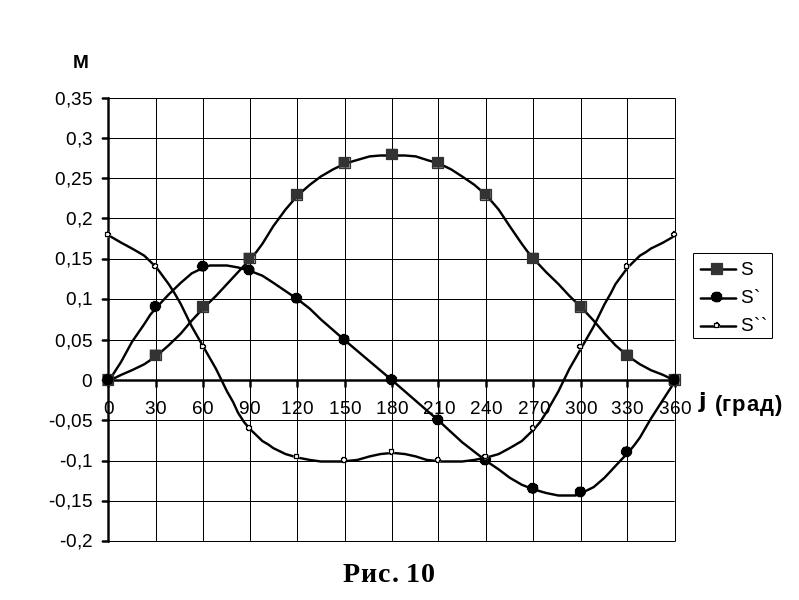
При построении необходимо учитывать взаимосвязь между ними, выражающуюся в согласованном расположении характерных точек. Нулевому значению аналога скорости соответствует максимальное (или минимальное) значение перемещения ползуна. Нулевым значениям аналога ускорения соответствуют точки максимума или минимума на графике аналога скорости и точки перегиба на графике перемещения. Точкам максимума или минимума на графике аналога ускорения соответствуют точки перегиба на графике аналога скорости.
г) построение плана скоростей и ускорений.
Производится в
положении механизма при
(рис. 8 или 9). Методика построения дана
в разд. 1.3. Средняя величина угловой
скорости
определяется по зависимости:
![]() 1=
1=![]() n1/30.
(50)
n1/30.
(50)
Значения
![]() ,
полученные из планов, следует сравнить
с аналитическими, определяемыми по
зависимостям (17) и (21) при
,
полученные из планов, следует сравнить
с аналитическими, определяемыми по
зависимостям (17) и (21) при
![]() .
.
4.3. Содержание и порядок силового расчета (II этап)
а) на схеме механизма
(рис. 8 или 9) следует показать (без
масштаба), приложенные к звеньям силы
![]() и
момент
на кривошипе. Их направления можно
определить, используя план скоростей
и план ускорений: сила сопротивления
– против
,
сила инерции
и
момент
на кривошипе. Их направления можно
определить, используя план скоростей
и план ускорений: сила сопротивления
– против
,
сила инерции
![]() –
против
.
Величины
–
против
.
Величины
![]() и
вычисляются по зависимостям (26), (27);
и
вычисляются по зависимостям (26), (27);
б) для всех положений
механизма определить величины
,
,
и
![]() .
При этом для вертикальной схемы (рис.
8) используем зависимости (42), (41), (40),
(44), (46). Для горизонтальной схемы (рис.
9) используем зависимости (48), (41), (47),
(44), (46);
.
При этом для вертикальной схемы (рис.
8) используем зависимости (42), (41), (40),
(44), (46). Для горизонтальной схемы (рис.
9) используем зависимости (48), (41), (47),
(44), (46);
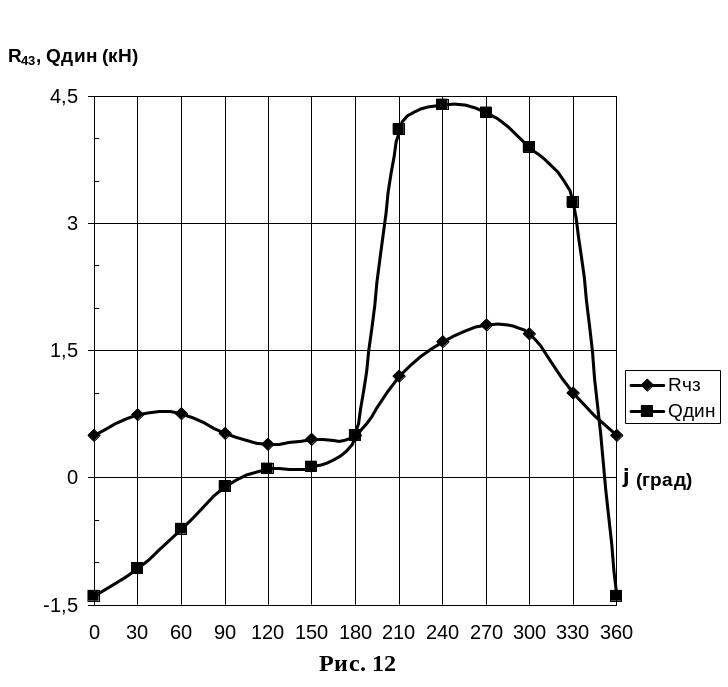
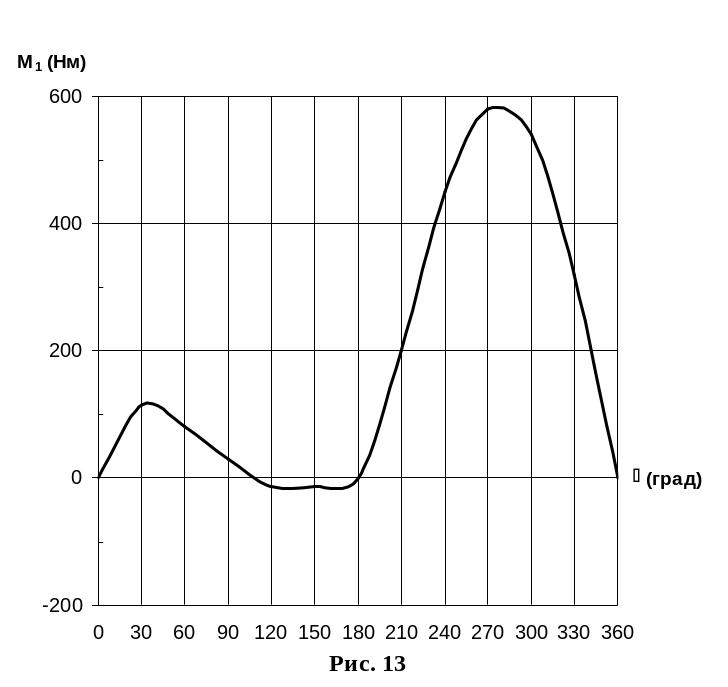
в) по результатам расчетов построить годограф реакции (рис. 11) и графики и , в зависимости от угла поворота кривошипа (рис. 12; 13). Следует отметить, что характер графиков зависит от величин исходных данных работы и может отличаться от приведенных на рис. 11, 12, 13;
г) в положении механизма построить проверочный план сил для ползуна (рис. 14). Должно выполняться условие равновесия сил:
![]() .
(51)
.
(51)