

17. Электромагнитные датчики
- предназначены для преобразования перемещения в электрический сигнал за счет изменения параметров электромагнитной цепи. Эти изменения могут заключаться в увеличении или уменьшении магнитного сопротивления RM магнитной цепи датчика при перемещении сердечника. Если перемещается не сердечник, а обмотка, то происходит изменение потокосцепления обмотки. Изменения в электромагнитной цепи датчика могут быть вызваны как перемещением элемента магнитной цепи (сердечника или якоря), так и перемещением элемента электрической цепи (обмотки). В результате таких перемещений изменяется индуктивность обмотки L или ее взаимоиндуктивность М с обмоткой возбуждения - индуктивные L=f(x,. М=f(x). Так как ЭДС в выходной обмотке появляется за счет изменения коэффициента взаимоиндукции с обмоткой возбуждения -трансформаторные E=f(t). Обмотку возбуждения можно рассматривать как первичную обмотку трансформатора, а выходную обмотку — как вторичную. К генераторным относятся индукционные датчики, в обмотках которых генерируется ЭДС в зависимости от скорости перемещения: E=f(dx/dt). Изменение индуктивности и взаимоиндуктивности может происходить и под влиянием механических напряжений в сердечнике ЭД. Такие напряжения приводят к изменению магнитной проницаемости ферромагнитного материала сердечника - магнитоупругие датчики.
С помощью ЭД можно автоматически измерять механические силы, давление, температуру, свойства магнитных материалов, расход жидкостей и газов в трубопроводах.
Достоинства: простота и дешевизна конструкции, механическая прочность, высокая надежность за счет возможности съема выходного сигнала без скользящих контактов, возможность питания от промышленной сети частотой 50 Гц, возможность получения достаточно высокой мощности выходного сигнала, возможность работы как в диапазоне малых (доли мм), так и больших (метры) перемещений. Недостатки: влияние на выходной сигнал внешних электромагнитных полей и частоты питающего напряжения, возможность работы только на переменном токе.
О
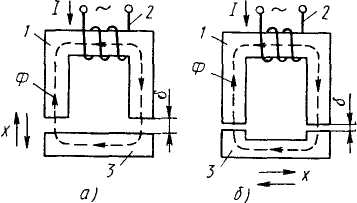
С увеличением воздушного зазора магнитное сопротивление увеличивается, а индуктивность, индуктивное и полное сопротивления уменьшаются (а). Ток в обмотке увеличивается.
Зависимость
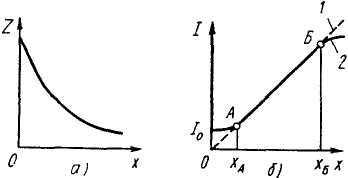
![]() имеет нелинейный характер. Участок АБ,
на
котором соблюдается прямая пропорциональность
между входным и выходным сигналами.
Этот участок называется рабочим, датчик
используется именно в диапазоне входных
сигналов от хА
до
хБ.
Следовательно, датчик всегда имеет
некоторый воздушный зазор, не меньший
хА.
имеет нелинейный характер. Участок АБ,
на
котором соблюдается прямая пропорциональность
между входным и выходным сигналами.
Этот участок называется рабочим, датчик
используется именно в диапазоне входных
сигналов от хА
до
хБ.
Следовательно, датчик всегда имеет
некоторый воздушный зазор, не меньший
хА.
В
некотором диапазоне изменения входного
сигнала
![]() статическая характеристика ИД является
линейной с постоянным коэффициентом
передачи. График статической характеристики
имеет вид прямой линии (штриховая линия
1
-
идеальная характеристика). Реальная
характеристика (сплошная линия 2)
совпадает
с идеальной на рабочем участке АБ.
Проанализируем
причины отклонения реальной характеристики
от идеальной. В зоне х
< хА
воздушный
зазор очень мал и его магнитное
сопротивление становится соизмеримым
с магнитным сопротивлением стальных
сердечника и якоря. Некоторый ток будет
протекать по обмотке, выполненной даже
на замкнутом магнитопроводе.
статическая характеристика ИД является
линейной с постоянным коэффициентом
передачи. График статической характеристики
имеет вид прямой линии (штриховая линия
1
-
идеальная характеристика). Реальная
характеристика (сплошная линия 2)
совпадает
с идеальной на рабочем участке АБ.
Проанализируем
причины отклонения реальной характеристики
от идеальной. В зоне х
< хА
воздушный
зазор очень мал и его магнитное
сопротивление становится соизмеримым
с магнитным сопротивлением стальных
сердечника и якоря. Некоторый ток будет
протекать по обмотке, выполненной даже
на замкнутом магнитопроводе.
В зоне х > хБ индуктивное сопротивление обмотки уже настолько уменьшается, что становится соизмеримым с активным сопротивлением обмотки, которое и ограничивает нарастание тока. Величину начального воздушного зазора δ0 (исходное положение якоря, при котором входной сигнал равен нулю) рекомендуется выбирать в середине линейного участка статической характеристики датчика.
С увеличением зазора чувствительность датчика резко уменьшается. Недостаток: на якорь действует сила притяжения к сердечнику. Эта сила вносит погрешность в работу датчика тем большую, чем меньше перестановочное усилие детали, перемещение которой надо измерить, диапозон изменения входного сигнла, при котором сохраняется линейность статической характеристики невелик.