

1.3 Кинематические схемы станков и условные обозначения их элементов
Кинематическая схема станка — изображение с помощью условных обозначений (табл. 1.1) взаимосвязи отдельных элементов и механизмов, станков, участвующих в передаче движений различным органам. Кинематические схемы вычерчивают в произвольном масштабе. Однако следует стремиться вписывать кинематическую схему в контуры основной проекции станка или важнейших его сборочных единиц, добиваясь сохранения их относительного расположения.
Для станков, у которых наряду с механическими передачами имеются гидравлические, пневматические и электрические устройства, составляют также гидравлические, пневматические, электрические и другие схемы.
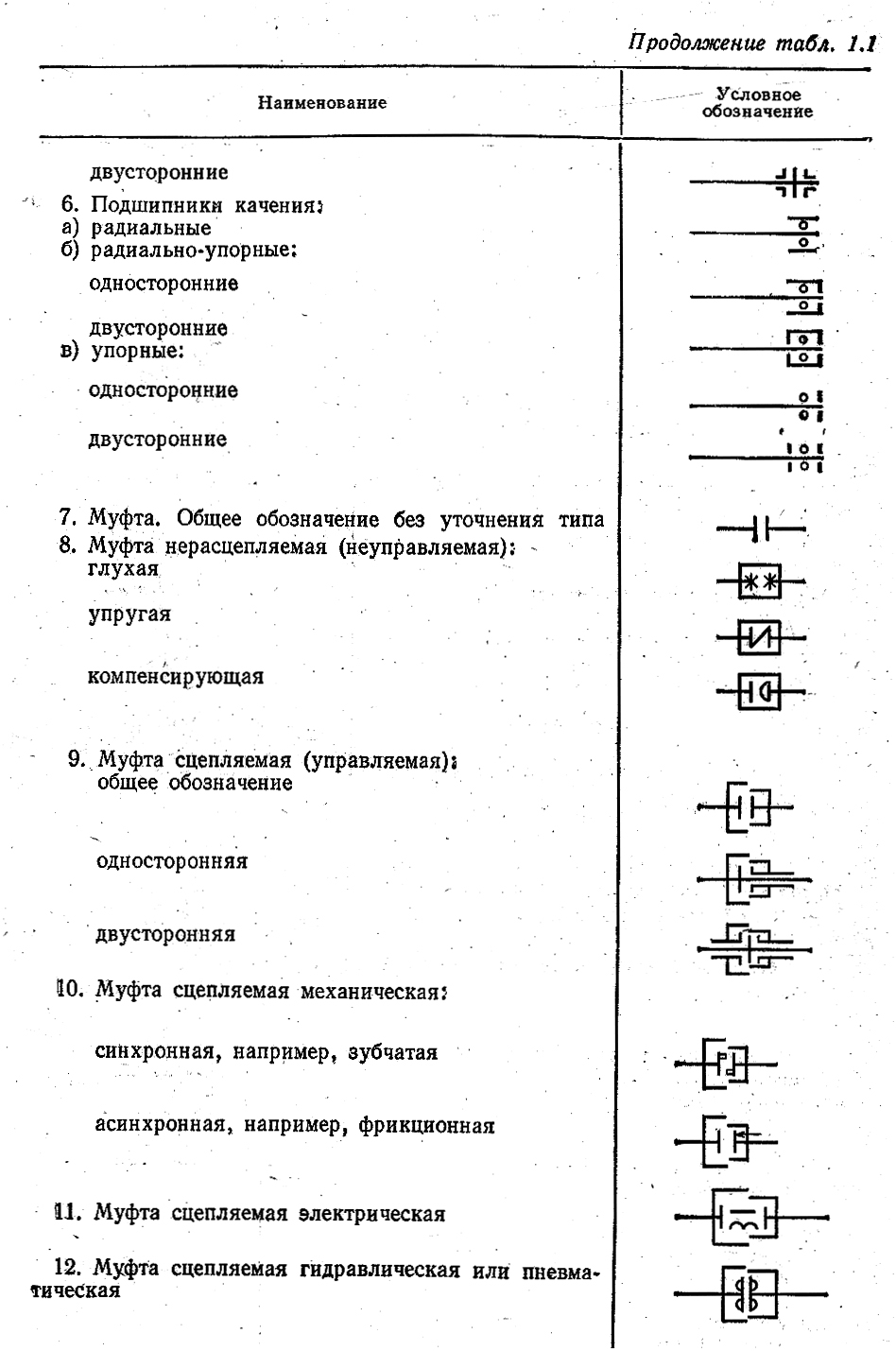
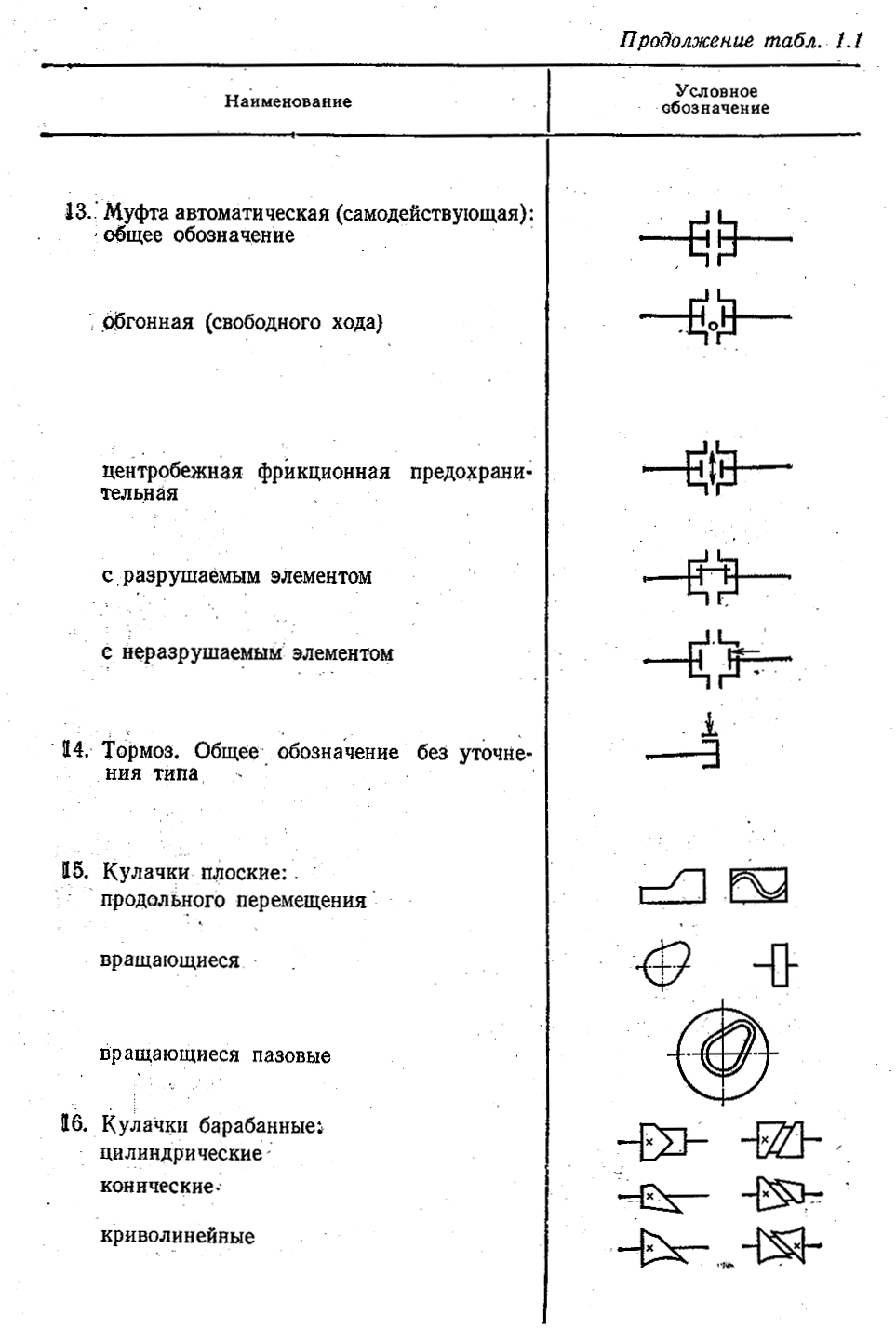
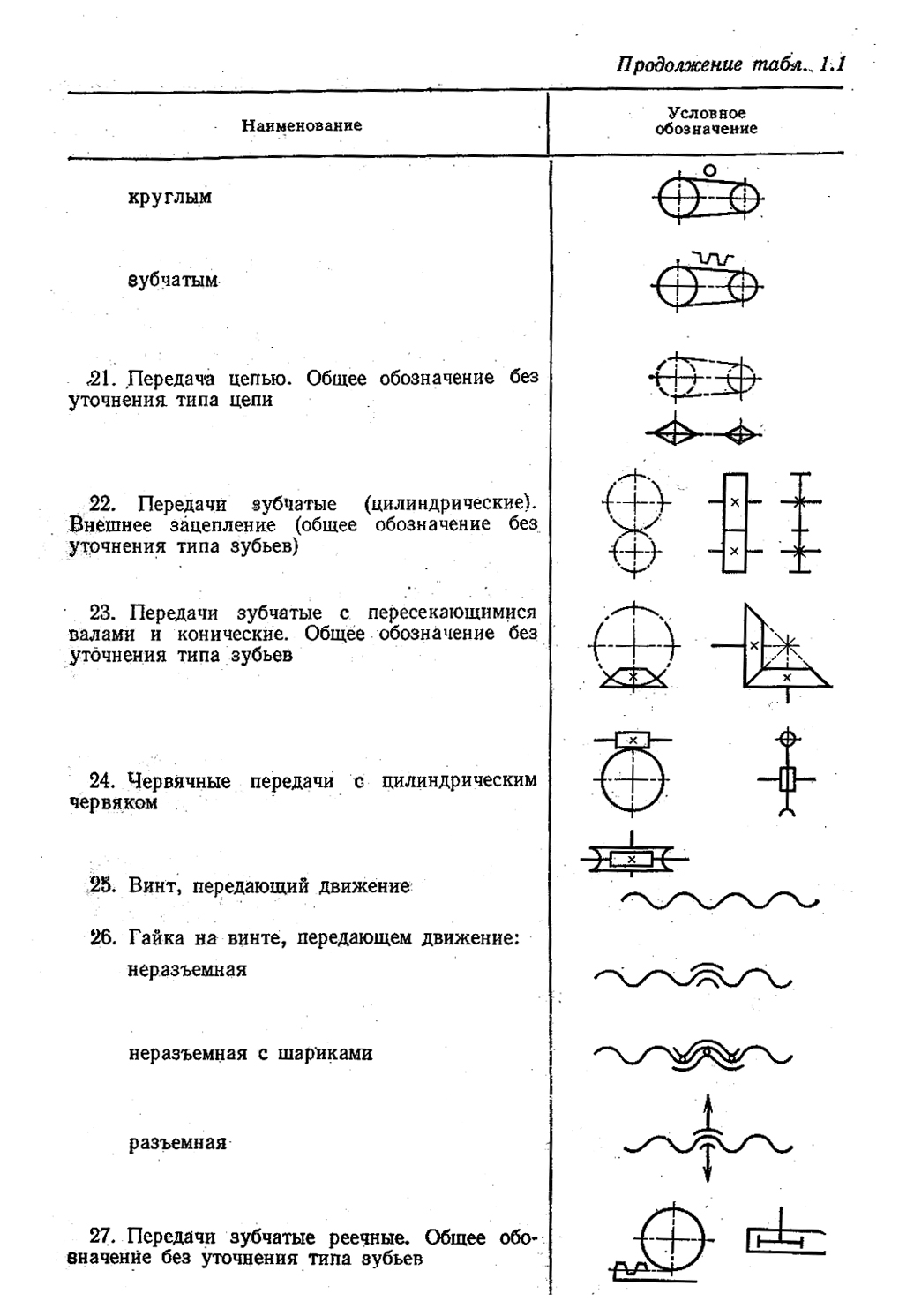
1.1. Условные графические обозначения для кинематических схем ГОСТ 2.770—68*


1.4 Определение передаточных отношений и перемещений в различных видах передач
Отношение частоты вращения (угловой скорости) n2 ведомого вала к частоте вращения п1 ведущего вала называют передаточным отношением:
i = n2/n1
Ременная передача. Передаточное отношение без учета скольжения ремня (рис. 1.1, а)
i = n2/n1 = d1/d2,
откуда
п2 = n1d1/d2
или
п1 = n2d2/d1,
где d1 и d2 — диаметры соответственно ведущего и ведомого шкивов.

Рис. 1.1 Передачи в станках
Скольжение ремня учитывают, введя поправочный коэффициент, равный 0,97—0,985.
Цепная передача. Передаточное отношение (рис. 1.1, б)
i = n2/n1=z1/z2,
откуда
п2 = n1 z1/z2
где z1 и z2 — числа зубьев соответственно ведущей и ведомой звездочек.
Зубчатая передача (рис. 1.1, в), осуществляемая цилиндрическими или коническими зубчатыми колесами. Передаточное отношение
i = n2/n1=z1/z2,
откуда
п2 = n1 z1/z2
где z1 и z2 — числа зубьев соответственно ведущего и ведомого зубчатых колес.
Червячная передача. Передаточное отношение (рис. 1.1, г)
i = n2/n1=Z/zк,
откуда
п2 = n1 Z /zк
где Z — число заходов червяка; zк — число зубьев червячного колеса.
Реечная передача. Длина прямолинейного перемещения рейки за один оборот реечного зубчатого колеса (рис. 1.1, д)
L = zp = zπm,
где р = πт— шаг зуба рейки, мм; z — число зубьев реечного зубчатого колеса; т — модуль зубьев реечного зубчатого колеса, мм.
Винт и гайка. Перемещение гайки за один оборот винта (рис. 1.1, е)
L = Zpв
где Z — число заходов винта; рв — шаг винта, мм.
1.5 Передаточные отношения кинематических цепей. Расчет частоты вращения и крутящих моментов
Для определения общего передаточного отношения кинематической цепи (рис. 1.1, ж) необходимо перемножить между собой передаточные отношения отдельных передач, входящих в эту кинематическую цепь:
iобщ=32 ×23×23×30×28×23×26 = 1
64 46 46 30 28 23 52 16
Частота вращения последнего ведомого вала равна частоте вращения ведущего вала, умноженной на общее передаточное отношение кинематической цепи:
п =950 iобщ
т. е. п = 950 1 ≈59,4 мин-1
16
Крутящий момент на шпинделе Мшп зависит от передаточного отношения кинематической цепи от электродвигателя к шпинделю. Если электродвигатель развивает момент Mдв, то
Мшп= Mдв,η/ iобщ
Мшп= 9560Nдв η/ iобщ п дв
где iобщ — передаточное отношение кинематической цепи от электродвигателя к шпинделю; Nдв и п дв — соответственно мощность (кВт) и частота вращения (мин-1) вала электродвигателя; η — КПД кинематической цепи от электродвигателя к шпинделю.