

2.9 Реверсивные механизмы
Направление движения в механизмах станков можно изменять с помощью различных механических, электрических и гидравлических устройств. Наиболее часто применяют реверсивные механизмы с цилиндрическими и коническими коле-ми. На рис 2.29, а—в показаны схемы реверсивных механизмов с передвижными зубчатыми колесами, а на рис. 2.31, г—е — с неподвижными колесами и муфтами. В механизме с коническими зубчатыми колесами (рис. 2.29, ж) реверсирование производится двусторонней кулачковой муфтой. Направления вращения на рисунке показаны стрелками.
В некоторых моделях зубообрабатывающих станков применяют реверсивные механизмы, показанные на рис. 2.29, з. При неизменном направлении вращения зубчатого колеса z составное колесо получает возвратно-вращательное движение.
Гидравлическое реверсирование осуществляется изменением направления потока масла в рабочий цилиндр, чаще всего с помощью направляющих гидрораспределителей, электрическое реверсирование — путем изменения направления вращения электродвигателя привода.

Рис. 2.29 Схемы реверсивных механизмов
2.10 Планетарные передачи
Планетарной называют зубчато-реечную передачу, в которой часть зубчатых колес (сателлитов) перемещается со своими осями относительно центрального колеса всеете с водилом. Звено, на котором установлены зубчатые колеса с подвижными осями, называют водилом.
Сателлит — зубчатое колесо с подвижной осью вращения, которое одновременно вращается вокруг своей оси и совершает движение вместе с водилом. При подвижном водиле сателлиты, вращаясь вокруг своих осей? в то же время вращаются вместе с ними.
Неподвижную ось, около которой вращается или может вращаться водило, называют основной. Сцепляющиеся с сателлитами зубчатые колеса, оси которых совпадают с основной осью, называют центральными. При неподвижном водиле планетарная передача превращается в простую. Планетарные механизмы, в которых подвижны все три основных звена, называют дифференциальными или дифференциалами.
Планетарные передачи позволяют получать широкий диапазон передаточных отношений (особенно больших передаточных отношений) и осуществлять сложение (алгебраическое) движений. К достоинствам планетарных передач относятся малые размеры и масса, незначительные потери на трение. Переход от обычных передач к планетарным обеспечивает снижение массы в 1,5—5 раз.
Планетарная передача с цилиндрическими колесами (рис. 2.30, а). У этой передачи зубчатые колеса z1 и z4 являются центральными, z2 и z3 — сателлитами, а звено 1 — водилом. Передача обладает возможностью передавать движение семью различными способами:
1) вал п1— ведущий, п4 — неподвижный, водило п0 — ведомое;
2) вал п1— ведомый, п4— неподвижный, водило п0 — ведущее;
3) вал п1— ведущий, п4 — ведомый, водило п0 — ведущее;
4) вал п1— ведомый, п4 — ведущий, водило п0 — ведущее;
5) вал п1 — неподвижный, п4— .ведущий, водило п0 — ведомое;
6) вал п1 — неподвижный, п4 — ведомый, водило п0— ведущее;
7) вал п1 — ведущий, п4 — ведущий, водило п0 — ведомое. Подобная планетарная передача применена, например, на горизонтально-расточном станке 2620В для осуществления радиальной подачи суппорта планшайбы. Ведущими у нее являются водило 1 и вал с зубчатым колесом z1, а ведомым — колесо z4
Для определения частоты вращения валов планетарной передачи используют формулу Виллиса:
n1- n2 = z2 z4(-1)m
n4- n0 z1 z3
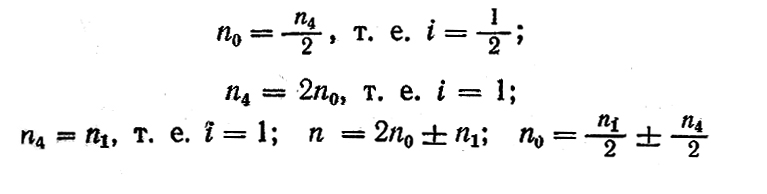
где т — число наружных зацеплений (для данного случая т = 2). По уравнению Виллиса находим следующие соотношения для указанных выше случаев:
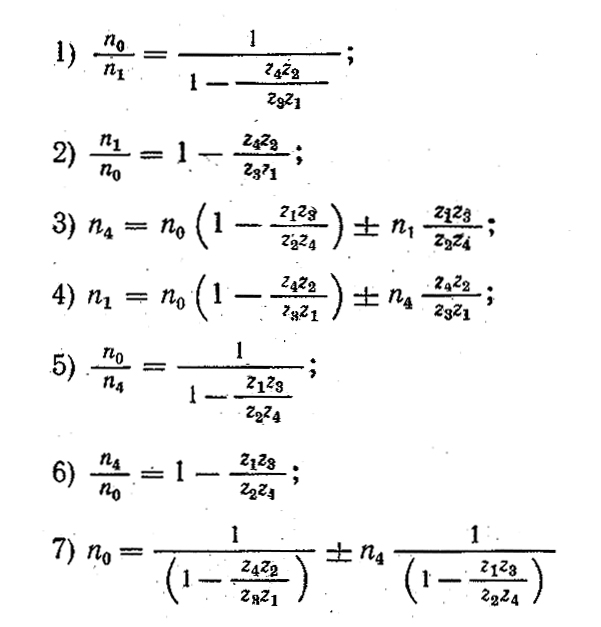
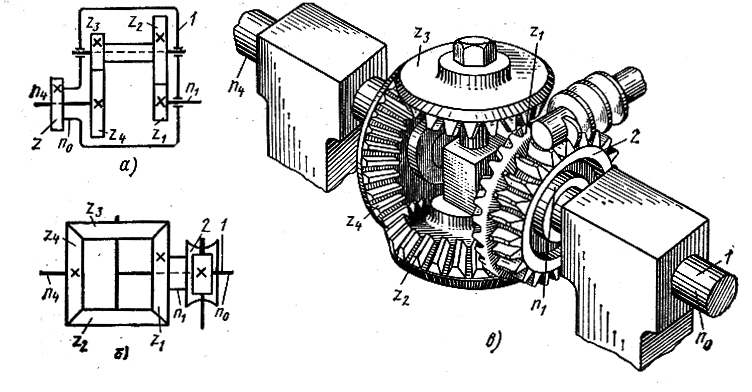
Рис.2.30 Планетарные механизмы
Планетарные передачи с коническими колесами (рис. 2.30, б и в) широко распространены в станкостроении. У этих передач из трех звеньев любые два могут быть ведущими, а третье — ведомым. Дифференциал состоит из центральных колес z 1 и z4, сателлитов z 2 и z3 и водила 1, Как правило, зубчатое колесо z4 вращается с большей частотой (основная), а колесо z1 — с меньшей (добавочная частота). Вращение колесу z1 передается от червячной пары 2.
Дифференциал может работать по следующим схемам:
а) ведущим является колесо z4, а ведомым — водило; червячная пара неподвижна;
б) ведущим является водило, а ведомым — зубчатое колесо z 4; червячная пара неподвижна;
в) ведущим является колесо z1 а ведомым — колесо z4; водило неподвижно;
г)одновременно с вращением водила вращается от червячной пары зубчатое колесо z 1 (ведомым является колесо z 4);
д) ведущими являются колеса z 4 и z1 а ведомым звеном — водило.
Передаточные отношения дифференциала для различных случаев можно определить, используя формулу Виллиса, имеющую для этой передачи (z 2 = z 3 и z1= z 4) следующий вид:
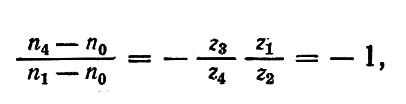
где п0— частота вращения водила; п1 и п4 — соответственно частоты вращения зубчатых колес z1 и z4.
Знак «минус» перед единицей стоит потому, что при неподвижном водиле колеса z1 и z4 вращаются в разных направлениях.
Формула Виллиса дает следующие соотношения:
В формулах знак «плюс» используют при разных направлениях вращения ведущих звеньев дифференциала, а знак «минус» — при одинаковых направлениях вращения.