

2.41. Частотная характеристика системы первого порядка.
Системы второго порядка
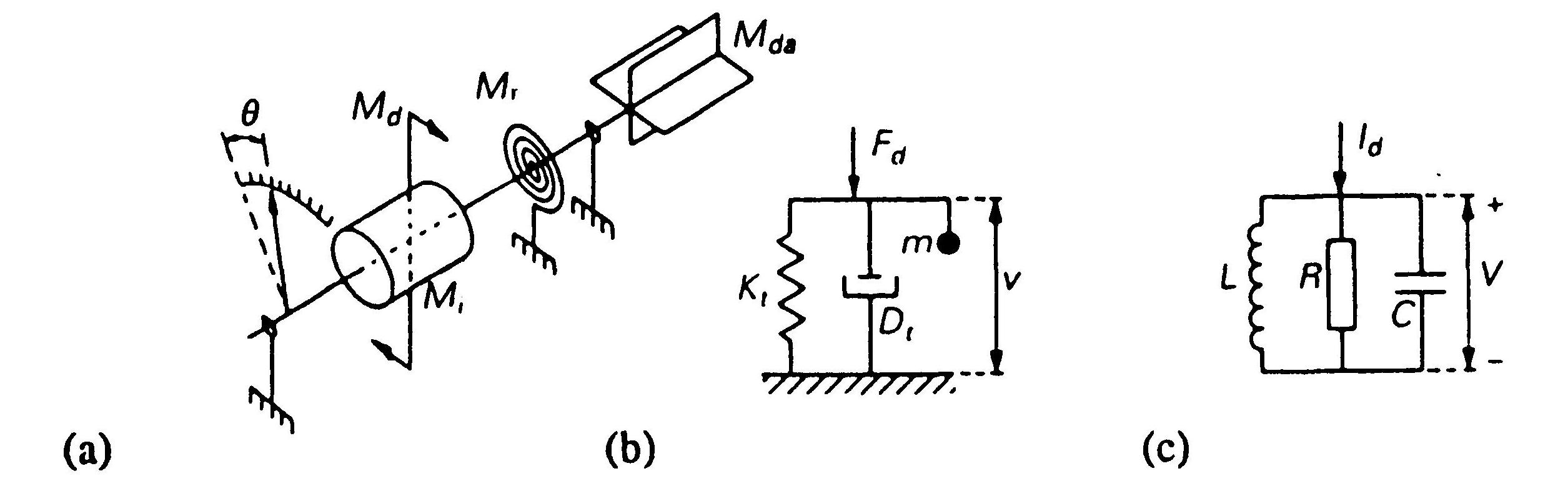
В качестве примера системы второго порядка мы воспользуемся конструкцией стрелочного прибора (в частности, измерителя с подвижной катушкой), которая представляет собой вращающуюся механическую систему. Каждая из следующих четырех механических пар сил оказывает воздействие на вращающуюся часть измерителя, создавая вращающий момент (рис. 2.42(a)):
- Отклоняющее воздействие. Это
воздействие вызывает отклонение стрелки
на угол
Отклоняющее воздействие. Это
воздействие вызывает отклонение стрелки
на угол
![]() .
Момент этого воздействия
пропорционален измеряемой величине
(току). Мы обозначим этот момент Md.
.
Момент этого воздействия
пропорционален измеряемой величине
(току). Мы обозначим этот момент Md.
Рис. 2.42. Системы второго порядка: (а) механическое вращение; (b) механическое поступательное движение; (с) параллельный электрический контур.
- Возвращающее воздействие. Это воздействие оказывает противодействие отклонению стрелки. В данном примере оно создается спиральной пружиной; вращающий момент этого воздействия обозначается Мr. Когда достигается установившееся состояние, отклоняющий момент и возвращающий момент равны: Md = Мr. Обычно бывает так, что возвращающий момент пропорционален углу отклонения , то есть Мr = Кr , где Кr — коэффициент упругости (жесткость пружины).
- Демпфирующее воздействие. Это воздействие также противодействует отклоняющему моменту. Демпфирующий момент пропорционален угловой скорости стрелки, так что Mda = Dr d / dt. Здесь Dr — постоянная затухания вращающейся конструкции. Затухание линейно зависит от угловой скорости d / dt.
Демпфирование применяют для того, чтобы предотвратить проскакива-ние стрелки за конечное значение и колебания стрелки вокруг него. Для этого используют те или иные крыльчатые приспособления и поршни (воздушное демпфирование), а также индукцию вихревых токов в металлической пластине в случае движущихся систем (демпфирование за счет токов Фуко).
- Инерционность. Инерция вращающейся конструкции измерителя приводит к возникновению еще одного противодействующего момента, который пропорционален угловому ускорению стрелки, так что
![]() ,
,
где J — момент инерции вращающейся конструкции относительно оси вращения.
Динамическое поведение измерителя определяется его уравнением движения; в любой момент времени отклоняющий момент уравновешивается суммой всех других моментов:
M + Mda + Мr = Md
или
![]() .
.
В результате, как и следовало ожидать, мы пришли к линейному дифференциальному уравнению второго порядка.
Чтобы сделать более ясной
аналогию с другими системами, указанными
на рис. 2.42, перепишем полученное уравнение,
введя новую переменную
![]() :
:
![]() =
Md
=
Md
Отклоняющий момент Md является I-величиной (см. приложение А.4), а угловая скорость — V-величиной. Вращающаяся механическая система аналогична системе с поступательным движением, изображенной на рис. 2.42(b). Эта последняя состоит из груза массы т, пружины с коэффициентом упругости Kt и демпфера с постоянной затухания Dt Если на систему действует сила Fd, то скорость v груза по отношению к земле удовлетворяет равенству
![]() .
.
Поскольку v
=dx
/ dt,
мы снова приходим к тому же самому
линейному дифференциальному уравнению
второго порядка, что и полученное ранее.
Наконец, обе механические системы — с
вращательным и с поступательным
движениями — аналогичны электрической
системе, показанной на рис. 2.42(c).
На этот параллельный электрический
контур действует I-величина:
по нему течет ток I![]() .
Мы хотим определить
V-величину,
являющуюся решением уравнения:
.
Мы хотим определить
V-величину,
являющуюся решением уравнения:
![]() =
I
.
=
I
.
Это уравнение эквивалентно обоим уравнениям, полученным выше. Все различие может состоять в том, что I -величины и V-величины поменяются местами. Структура системы остается одной и той же, когда мы переходим от J к m или С, одновременно заменяя Dr на Dt или 1 / R, а также Кr - на Kt или 1 / L (см. приложение А.4). Принимая во внимание, что
V=L![]() ,
,
последнее уравнение можно переписать в виде:
![]() ,
,
где I представляет собой ток, текущий по катушке L.
Мы видим теперь, что дифференциальное уравнение, описывающее линейную систему второго порядка, в общем случае содержит две постоянные а и b:
![]() .
.
Здесь х — это величина входного воздействия х(t), а у — выходная величина y(t), нормализованная по отношению к чувствительности по постоянному току S(0), так что
у = y(f)
/ S(0).
Благодаря нормализации
третья постоянная в дифференциальном
уравнении отсутствует. Чтобы сделать
запись более наглядной, введем две
другие постоянные: относительное
затухание z
и угловую частоту
![]() свободных незатухающих
колебаний в системе, и перепишем
общее уравнение с использованием этих
констант:
свободных незатухающих
колебаний в системе, и перепишем
общее уравнение с использованием этих
констант:
![]() .
.
В случае системы с вращением переменные и параметры, входящие в это уравнение, имеют вид:
x=![]() ,
y=
,
,
y=
,
![]() =
=![]() и
и
![]() ,
,
а в случае системы с поступательным движением —
x=![]() ,
y=x,
=
,
y=x,
=![]() и
и
![]() ,
,
Для электрической цепи имеем:
X=I
,
y=I,
=![]() и
,
и
,
Соответствующее уравнение в операторной форме выглядит так:
![]() ,
,
и корни его равны
![]() .
.
Необходимо различать следующие три характерных случая: z < 1, z = 1 и z>l.
Недостаточное демпфирование (z < 1)
Можно показать, что отклик системы y(t) на входной сигнал, имеющий форму скачка величины х0 , происходящего в момент t = 0, равен
 .
.
где
![]() ; при выводе этого
выражения предполагается, что начальные
значения у(0) и
(dy
/ dt)t=0
равны нулю. Конечное
значение, достигаемое в установившемся
режиме, равно
; при выводе этого
выражения предполагается, что начальные
значения у(0) и
(dy
/ dt)t=0
равны нулю. Конечное
значение, достигаемое в установившемся
режиме, равно
![]() .
.
Непосредственно вслед за
входным скачком возникают затухающие
колебания с частотой
![]() ,
наложенные на конечное
значение (см. рис. 2.43). Мы видим, что с
ростом z
затухание колебаний
происходит все быстрее. Поэтому z
называют относительной
скоростью затухания. Если
z
= 0, то колебания в
системе продолжаются и их частота равна
; система
находится в режиме свободных
колебаний. Таким
образом,
—
это резонансная частота системы, в
которой затухание отсутствует полностью.
,
наложенные на конечное
значение (см. рис. 2.43). Мы видим, что с
ростом z
затухание колебаний
происходит все быстрее. Поэтому z
называют относительной
скоростью затухания. Если
z
= 0, то колебания в
системе продолжаются и их частота равна
; система
находится в режиме свободных
колебаний. Таким
образом,
—
это резонансная частота системы, в
которой затухание отсутствует полностью.
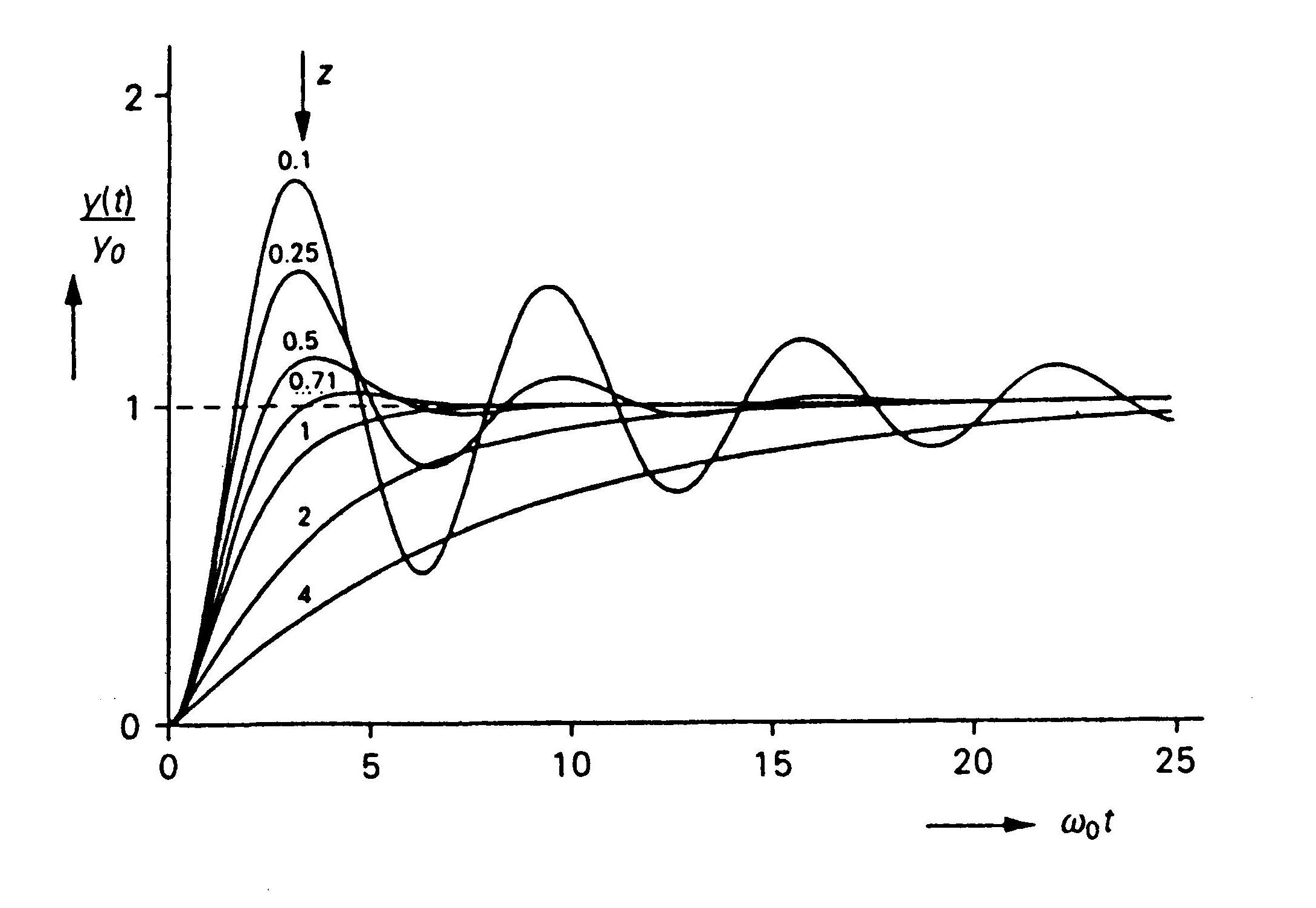
Рис. 2.43. Переходные характеристики системы второго порядка при различных значениях относительного коэффициента затухания z.
Критическое демпфирование (z = 1)
Предполагая снова, что
начальные условия являются нулевыми,
то есть у(0)
= 0 и (dy/dt)![]() = 0, а величина скачка на входе в момент
t
= 0 равна х
,
получаем следующее выражение для
переходной характеристики системы
второго порядка при z
= 1:
= 0, а величина скачка на входе в момент
t
= 0 равна х
,
получаем следующее выражение для
переходной характеристики системы
второго порядка при z
= 1:
![]() .
.
Как и ранее, конечное значение у0 равно х0, но теперь на выходе нет затухающих колебаний (см. рис. 2.43).
Обычно измерители с подвижной катушкой бывают сконструированы таким образом, чтобы демпфирование у них было не точно критическим, а слегка недостаточным (z = l/ ). Из-за этого происходит небольшое проскакивание стрелки (4%). Достоинство такого подхода состоит в том, что наблюдатель яснее видит, когда стрелка устанавливается на конечном значении. У такого значения коэффициента затухания z применительно к измерительным системам есть и другое достоинство: при z 0,7 амплитудно-частотная характеристика оказывается горизонтальной в возможно более широком диапазоне частот (этот вопрос рассмотрен ниже; см. рис. 2.45).
Избыточное демпфирование) (z > 1)
При тех же начальных условиях, что и выше, но с коэффициентом затухания z больше единицы, переходная характеристика y(t) как реакция на входной скачок величины х0 в момент t = 0 имеет вид:
 ,
,
где![]() .
В данном случае выходная величина будет
постепенно приближаться («ползти») к
конечному значению у0
= х0
(см. рис. 2.43).
.
В данном случае выходная величина будет
постепенно приближаться («ползти») к
конечному значению у0
= х0
(см. рис. 2.43).
Постоянная времени прибора или его время установления (готовности) ts зависит от коэффициента затухания z, периода T0, соответствующего частоте свободных колебаний (T0 = 2 / ), и, естественно, от допустимой относительной ошибки в конечной величине y / y (см. рис. 2.44). У кривых на этом графике имеются разрывы при z < 1, обусловленные тем, что при заданных значениях Т0 и относительной погрешности (скажем 0,1%) время готовности ts увеличивается скачками при непрерывном уменьшении коэффициента затухания z. Причина скачков заключается в том, что время готовности каждый раз увеличивается на один период затухающих колебаний.
Частотную характеристику системы второго порядка легко найти, рассматривая RLC -аналог такой системы, показанный на рис. 2.42(c):
=![]() .
.
Амплитудно-частотная характеристика имеет вид:
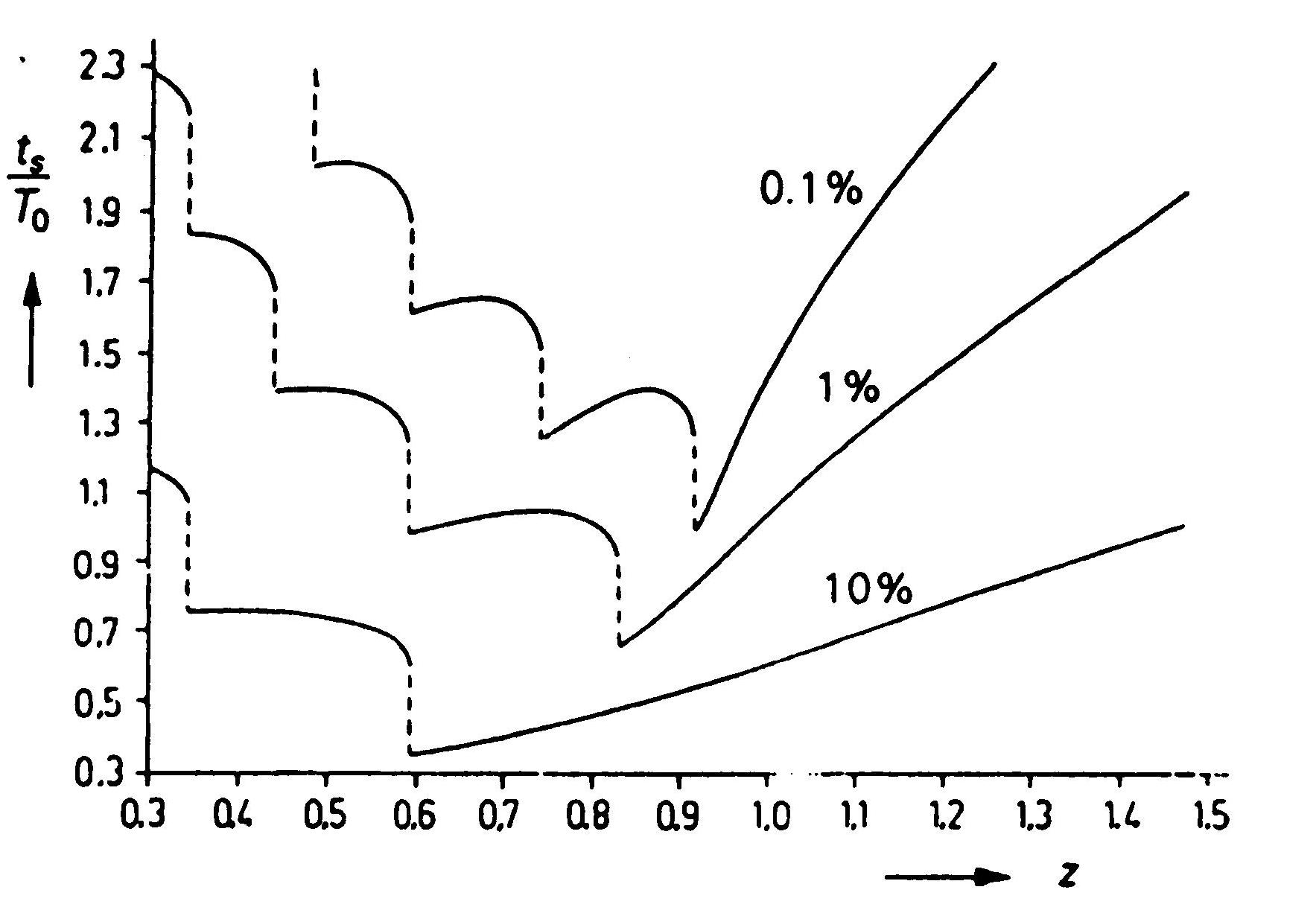
Рис.2.44. Время установления (готовности) ts системы второго порядка при различных значениях допустимой относительной ошибки у0 / у0 в конечном результате yQ. . TQ — период свободных колебаний,,a z — относительный коэффициент затухания системы.
|
|=![]() ,
,
а для фазовой характеристики справедливо соотношение:
Arg
=
-arctg![]() .
.
Подставляя z2 = L/4R2C и =1 / LC , можно написать эти выражения в общей форме. Дифференцируя | | по , находим, что максимум | | достигается при
тгх
=
![]() и значение |
|
в
максимуме равно
и значение |
|
в
максимуме равно
|![]() |=
|=![]()
(при z![]() ).
).
Частотная характеристика
оказывается плоской в возможно более
широ-ком диапазоне частот, если |
|
= |![]() |=1,
то есть в случае, когда z
=
/2.
При этом ширина полосы
системы равна f0
=
/ 2
-,
где t
— частота свободных
колебаний. В точке
=
фазовый сдвиг равен
—90°. На очень высоких частотах сдвиг
по фазе стремится к —180°, но никогда не
превышает этого значения, а величина
сигнала на выходе системы при этом почти
равна нулю. Если z
=
/2,
то амплитудно-частотная
характеристика имеет пик на частоте
затухающих колебаний (см. рис.2.45
(а) и (b)).
|=1,
то есть в случае, когда z
=
/2.
При этом ширина полосы
системы равна f0
=
/ 2
-,
где t
— частота свободных
колебаний. В точке
=
фазовый сдвиг равен
—90°. На очень высоких частотах сдвиг
по фазе стремится к —180°, но никогда не
превышает этого значения, а величина
сигнала на выходе системы при этом почти
равна нулю. Если z
=
/2,
то амплитудно-частотная
характеристика имеет пик на частоте
затухающих колебаний (см. рис.2.45
(а) и (b)).
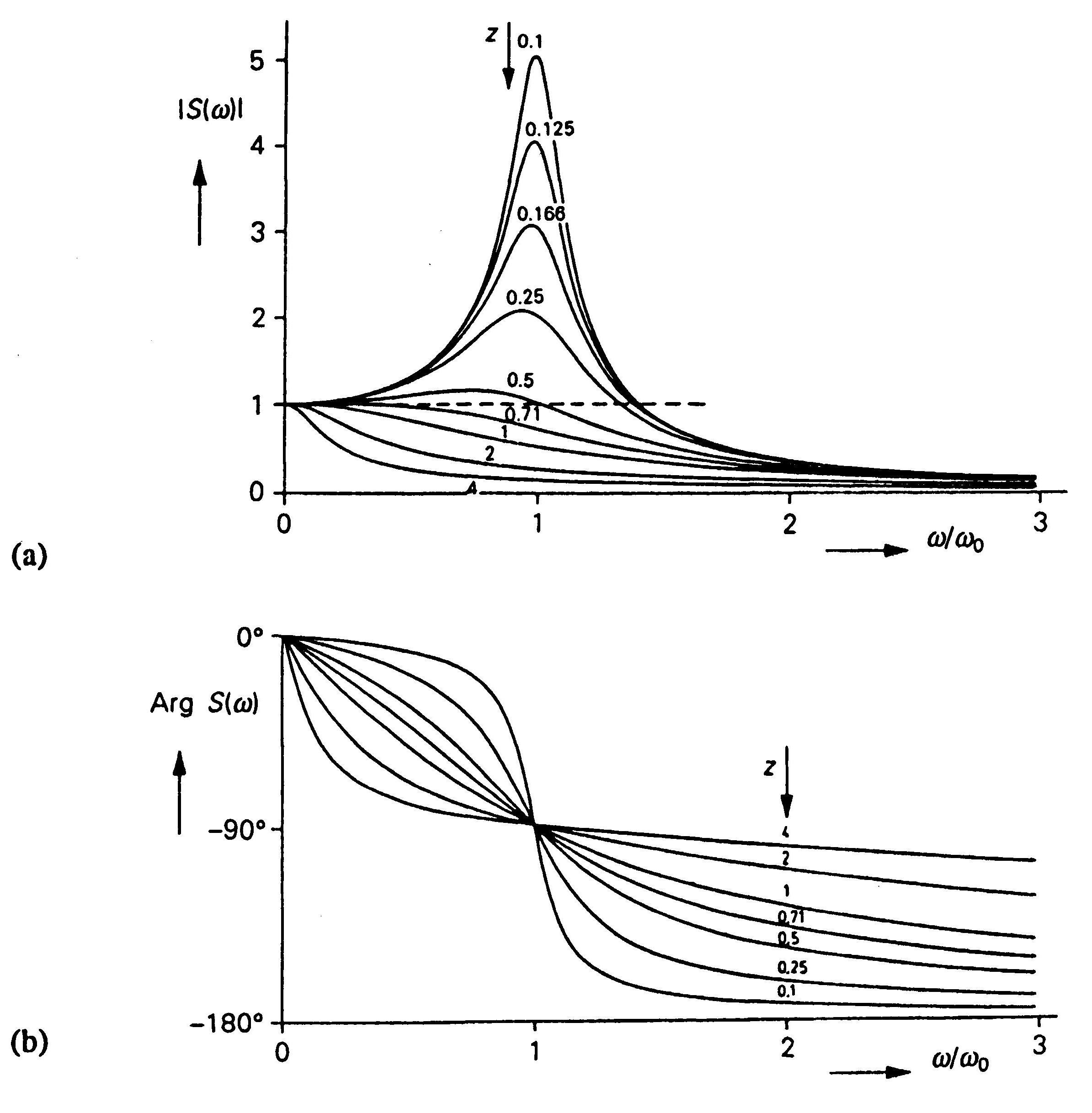
Рис. 2.45. (а) Амплитудно-частотная и (b) фазо-частотная характеристики системы второго порядка при различных значениях коэффициента затухания z.