

3 Определение параметров элементов динамической модели
трансмиссии
Определению
подлежат параметры инерционных элементов
,
упругих элементов
![]() ,
диссипативных элементов
,
диссипативных элементов
![]() и трансформаторных элементов
и трансформаторных элементов
![]() .
.
Значение соответствует моменту инерции двигателя, определяемому в основном величиной момента инерции его маховика. При отсутствии данных значение определяют по эмпирическим зависимостям:
для бензиновых двигателей грузовых автомобилей
![]() ;
(1)
;
(1)
для бензиновых двигателей легковых автомобилей
![]() ;
(2)
;
(2)
для дизельных двигателей грузовых автомобилей
![]() .
(3)
.
(3)
Значение соответствует приведенному моменту инерции ведомых дисков сцепления и вращающихся деталей коробки передач. Приближенная величина параметра может быть определена по эмпирической зависимости
![]() .
(4)
.
(4)
Значение
![]() зависит от массы автомобиля
зависит от массы автомобиля
![]() и моментов инерции колес и вычисляется
по формуле
и моментов инерции колес и вычисляется
по формуле
![]() ,
(5)
,
(5)
где ![]() – момент инерции i-го
колеса относительно его оси вращения,
кг·м2;
– момент инерции i-го
колеса относительно его оси вращения,
кг·м2;
![]() – количество колес
автомобиля.
– количество колес
автомобиля.
При отсутствии
данных по
вычисляют приведенную массу автомобиля
![]() по формуле
по формуле
![]() ,
(6)
,
(6)
где
![]() – коэффициент приведенной массы,
учитывающий влияние моментов инерции
колес на кинетическую энергию автомобиля.
– коэффициент приведенной массы,
учитывающий влияние моментов инерции
колес на кинетическую энергию автомобиля.
Значение приближенно может быть вычислено по эмпирической формуле
![]() .
(7)
.
(7)
Принимают
![]() .
С учетом
формула (5) преобразуется к виду
.
С учетом
формула (5) преобразуется к виду
![]() .
(8)
.
(8)
Значение
можно принять из соотношения
![]() .
.
Значение
![]() зависит от конструкции механизмов
трансмиссии и от номера включаемой
передачи. В первом приближении можно
принять
зависит от конструкции механизмов
трансмиссии и от номера включаемой
передачи. В первом приближении можно
принять
![]() .
(9)
.
(9)
Значения коэффициентов
жесткости упругих элементов трансмиссии
![]() и
и
![]() можно приближенно найти из следующих
соотношений:
можно приближенно найти из следующих
соотношений:
для автомобилей с бензиновыми двигателями
![]() ;
;
![]() (10)
(10)
для автомобилей с дизельными двигателями
![]() ;
;
![]() .
(11)
.
(11)
Определение
параметров трансформаторных элементов
![]()
![]() осуществляется по кинематической схеме
трансмиссии, которую необходимо привести
в проекте. Значения
и
осуществляется по кинематической схеме
трансмиссии, которую необходимо привести
в проекте. Значения
и
![]() относятся к коробке передач, а
и
относятся к коробке передач, а
и
![]() – к главной передаче. Вычисление их
значений осуществляется по известным
формулам.
– к главной передаче. Вычисление их
значений осуществляется по известным
формулам.
При определении коэффициентов демпфирования (сопротивления) диссипативных элементов и используются парциальные системы, приведенные на рисунке 2.

Рисунок 2 – Парциальные системы
Значение
![]() определяется по формуле
определяется по формуле
![]() ;
(12)
;
(12)
где ![]() – относительный коэффициент затухания
колебаний (безразмерная величина);
– относительный коэффициент затухания
колебаний (безразмерная величина);
![]() – приведенный
момент инерции, кг·м2;
– приведенный
момент инерции, кг·м2;
![]() – парциальная
частота, рад/с.
– парциальная
частота, рад/с.
Приведенные моменты
инерции
![]() и
и
![]() для рассматриваемых парциальных систем
определяются по формулам:
для рассматриваемых парциальных систем
определяются по формулам:
 ;
(13)
;
(13)
 .
(14)
.
(14)
Парциальные частоты
![]() и
и
![]() вычисляют по формуле
вычисляют по формуле
 .
(15)
.
(15)
При определении
![]() можно принять следующие значения
можно принять следующие значения
![]() :
:
![]() ;
;
![]() .
.
4 Орграф моделируемой системы
Характерной особенностью моделируемой динамической системы является переменность ее структуры, обусловленная наличием фрикционных элементов, которые могут находиться в одном из двух возможных состояниях: состоянии скольжения или в замкнутом состоянии. Кроме того, замыкание сцепления приводит к уменьшению числа степеней свободы системы на единицу. При этом изменяется взаимодействие элементов динамической системы, отображаемое фазовыми координатами типа потенциала. Это внутренние потенциалы системы (моменты упругих элементов, моменты трения фрикционных элементов), а их воздействие на сосредоточенные массы отображается на орграфе посредством соответствующих ветвей. Орграф моделируемой системы представлен на рисунке 3.
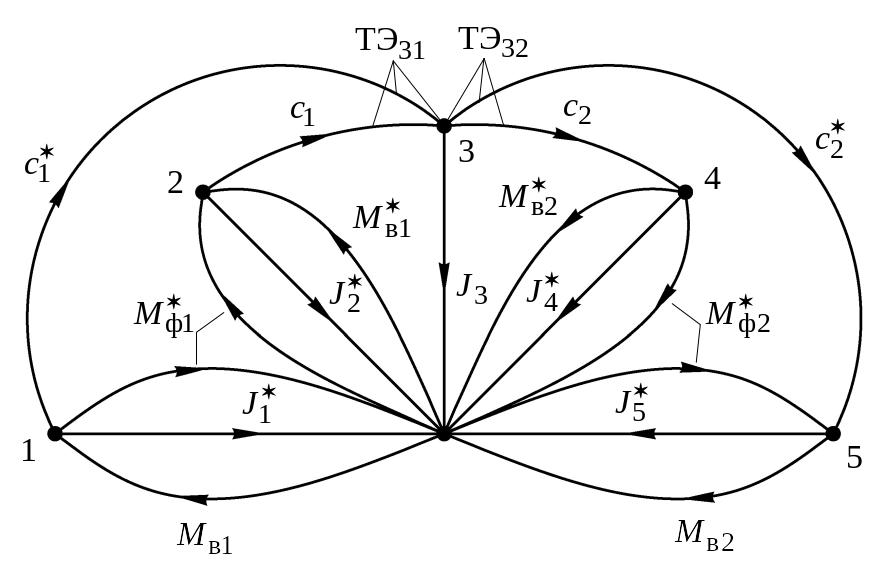

Рисунок 3 – Орграф динамической модели трансмиссии
Если воздействие
какого-либо потенциала на данную
сосредоточенную массу может возникать
или исчезать при изменении режима
фрикционного элемента, то такая ветвь
называется виртуальной, а ее потенциал
на орграфе помечается звездочкой.
Например, при скольжении сцепления
на сосредоточенную массу 1 действует
потенциал внешнего воздействия
,
потенциал фрикционного элемента
![]() и потенциал
и потенциал
![]() инерционного элемента, параметром
которого является
инерционного элемента, параметром
которого является
![]() ,
а после его замыкания действуют потенциалы
,
и потенциал
,
а после его замыкания действуют потенциалы
,
и потенциал
![]() первого упругого элемента с параметром
первого упругого элемента с параметром
![]() (см. рисунки 1 и 3). Следовательно, после
включения сцепления
вместо момента трения фрикционного
элемента
на сосредоточенную массу 1 действует
момент первого упругого элемента
,
поэтому на орграфе параметр этого
элемента помечен звездочкой
.
Кроме того, изменяется также параметр
инерционного элемента, поэтому он тоже
помечен звездочкой
.
Действительно, на режиме скольжения
сосредоточенные массы 1 и 2 разделены
сцеплением
,
и параметры инерционных элементов
соответствуют
и
,
а после замыкания сцепления обе
сосредоточенные массы объединяются, и
параметры инерционных элементов
оказываются одинаковыми, равными сумме
параметров обоих элементов, т.е.
(см. рисунки 1 и 3). Следовательно, после
включения сцепления
вместо момента трения фрикционного
элемента
на сосредоточенную массу 1 действует
момент первого упругого элемента
,
поэтому на орграфе параметр этого
элемента помечен звездочкой
.
Кроме того, изменяется также параметр
инерционного элемента, поэтому он тоже
помечен звездочкой
.
Действительно, на режиме скольжения
сосредоточенные массы 1 и 2 разделены
сцеплением
,
и параметры инерционных элементов
соответствуют
и
,
а после замыкания сцепления обе
сосредоточенные массы объединяются, и
параметры инерционных элементов
оказываются одинаковыми, равными сумме
параметров обоих элементов, т.е.
![]() .
.
Ветви диссипативных элементов на орграфе не показаны с целью упрощения рисунка. Эти ветви расположены аналогично ветвям упругих элементов.
Описание воздействий потенциалов на остальные сосредоточенные массы с учетом виртуальных ветвей должно быть выполнено студентом в пояснительной записке к курсовой работе.