

6.2 Анализ частотных характеристик и предварительная коррекция сар
Из рисунка 7 следует, что необходимо корректировать САР. Это можно сделать путем уменьшения коэффициента усиления с тем, чтобы обеспечить необходимые запасы устойчивости:
по фазе в пределах 400 - 700 и даже более;
по амплитуде 12 – 20 дБ,
а кроме того, как известно, для статической САР следует добиться коэффициента усиления контура в 10 – 100 единиц или, что то же, 20 – 40 дБ. Последнее условие в данном случае выполнить не удастся, поскольку коэффициент усиления равный 17 дБ и так меньше нижнего предела. Поэтому обеспечим пока лишь требования к запасам устойчивости. Для этого опустим вниз ЛАЧХ. Опускать нужно настолько, чтобы запас по фазе сделать 700 , при этом запас по амплитуде станет равным 14 дБ:
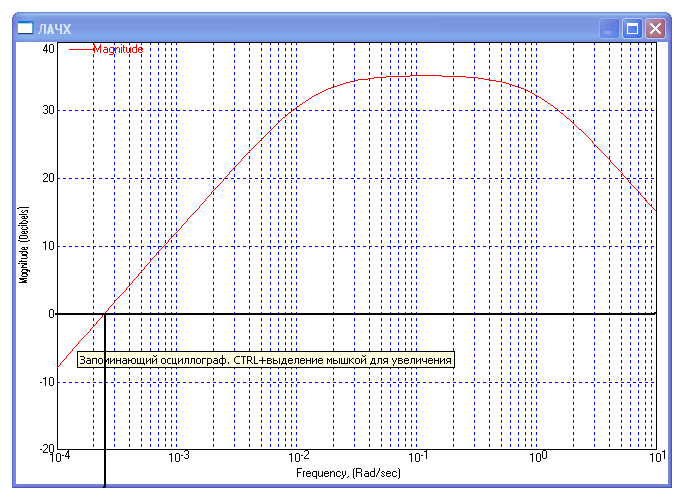
Рисунок.8-ЛАЧХ разомкнутого контура.
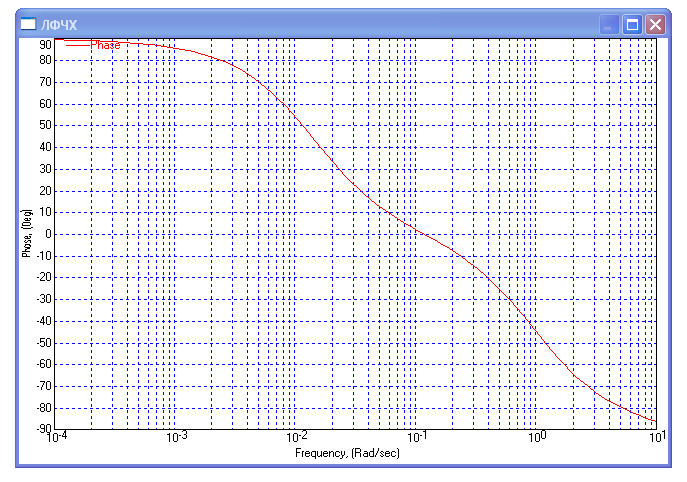
Рисунок.9.-ЛФЧХ разомкнутого контура.
7. Определение настроечных параметров пи-регулятора
Задача оптимизации сводится к нахождению настроечных параметров ПИ-регулятора: постоянной времени и коэффициента усиления. Рассмотрим определение настроек ПИ-регулятора на примере САР ЧВ ДПТ «Волна». Применительно к моей работе определение настроечных параметров ПИ- регуляторов будет проведено при выполнении дипломной работы.
Передаточная функция ПИ-регулятора имеет вид:
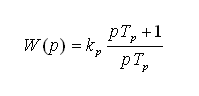
где:
kp – коэффициент усиления ПИ-регулятора;
Tp – постоянная времени ПИ-регулятора.
Ниже предлагается простой приближенный способ определения настроечных параметров ПИ-регулятора с использованием ЛАЧХ и ЛФЧХ предварительно скорректированной САР.
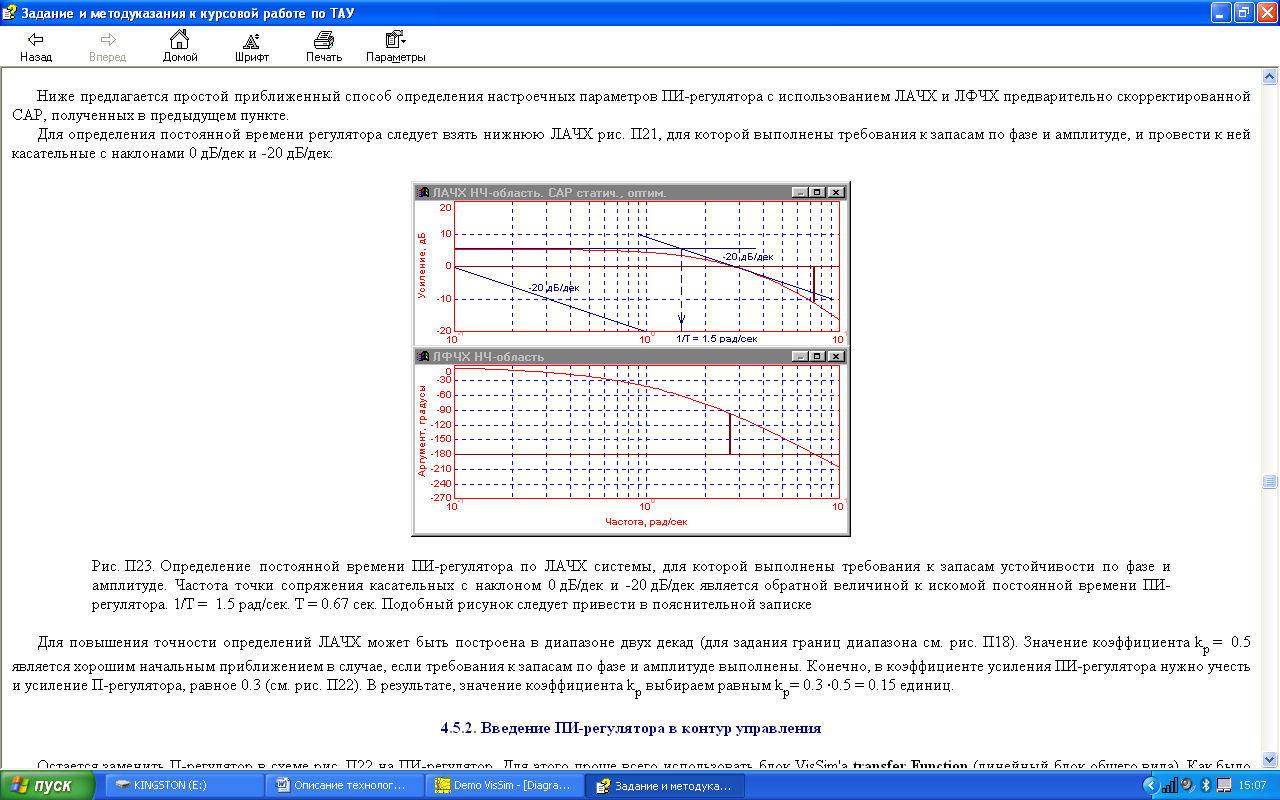
Рисунок.10.-Определение постоянной времени ПИ-регулятора по ЛАЧХ системы
Частота точки сопряжения касательных с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой постоянной времени ПИ-регулятора. 1/Т = 1.5 рад/сек. Т = 0.67 сек.
Для повышения точности определений ЛАЧХ может быть построена в диапазоне двух декад (для задания границ диапазона см. рис. П18). Значение коэффициента kp = 0.5 является хорошим начальным приближением в случае, если требования к запасам по фазе и амплитуде выполнены. Конечно, в коэффициенте усиления ПИ-регулятора нужно учесть и усиление П-регулятора, равное 0.3 (см. рис. П22). В результате, значение коэффициента kр выбираем равным kр= 0.3 ·0.5 = 0.15 единиц.
7.1. Введение пи-регулятора в контур управления
Установим ПИ-регулятор в структурную схему системы.
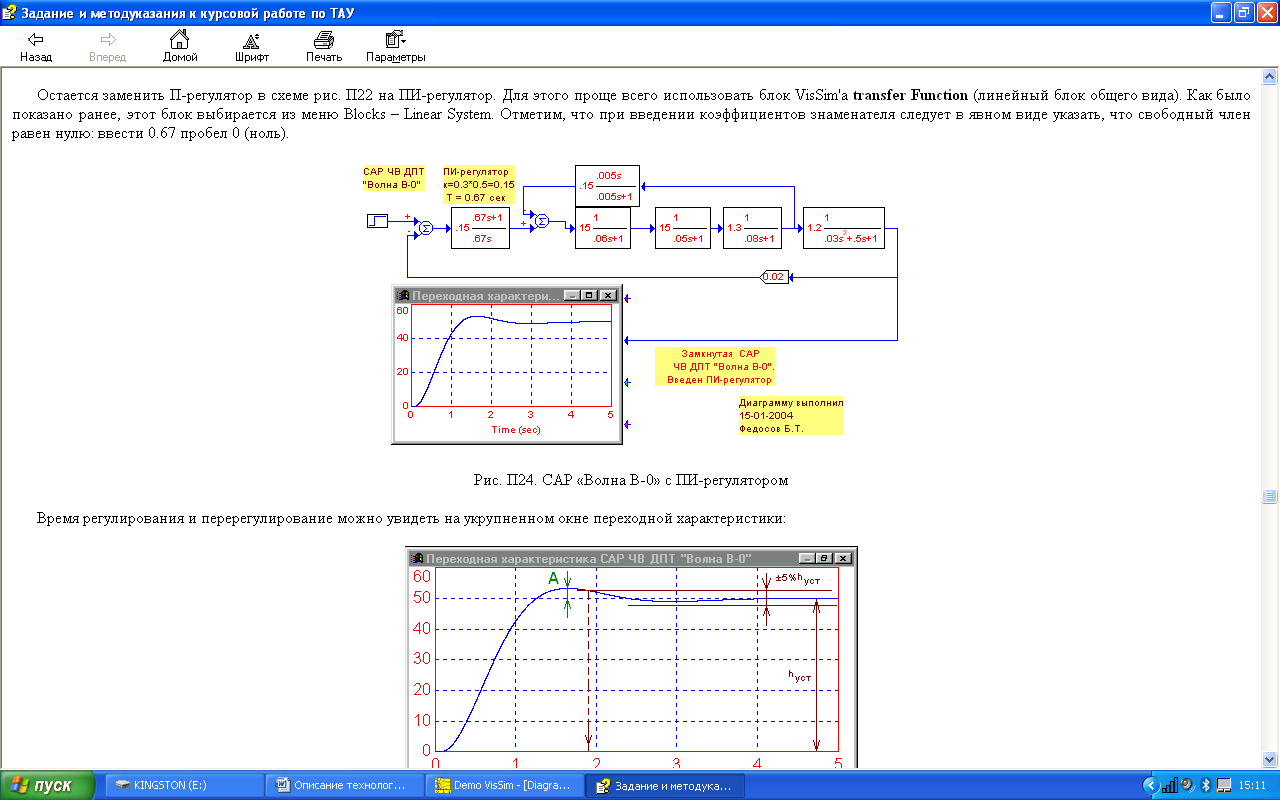
Рисунок.11.- Структура системы с ПИ-регулятором.
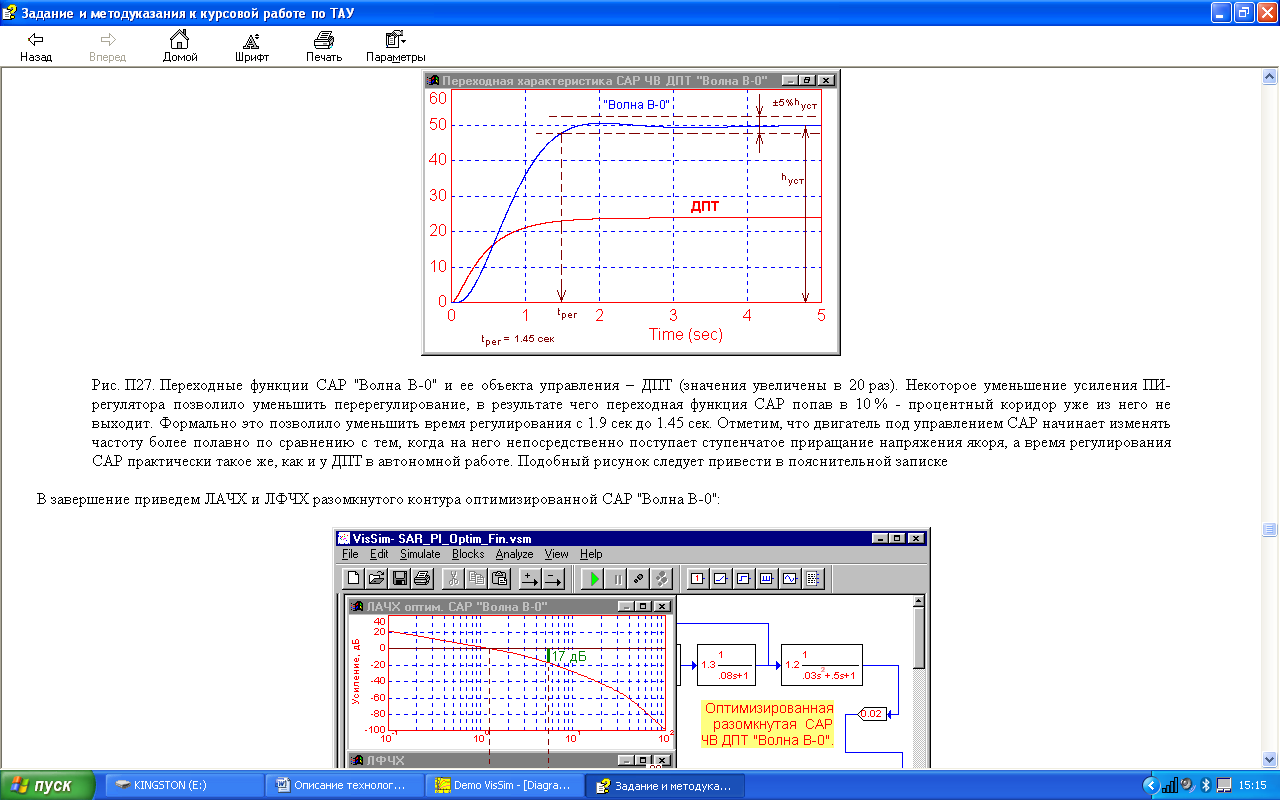
Рисунок .12.-Переходные функции САР "Волна В-0" и ее объекта управления – ДПТ
Некоторое уменьшение усиления ПИ-регулятора позволило уменьшить перерегулирование, в результате чего переходная функция САР попав в 10 % - процентный коридор уже из него не выходит. Формально это позволило уменьшить время регулирования с 1.9 сек до 1.45 сек. Отметим, что двигатель под управлением САР начинает изменять частоту более плавно по сравнению с тем, когда на него непосредственно поступает ступенчатое приращание напряжения якоря, а время регулирования САР практически такое же, как и у ДПТ в автономной работе. Подобный рисунок следует привести в пояснительной записке
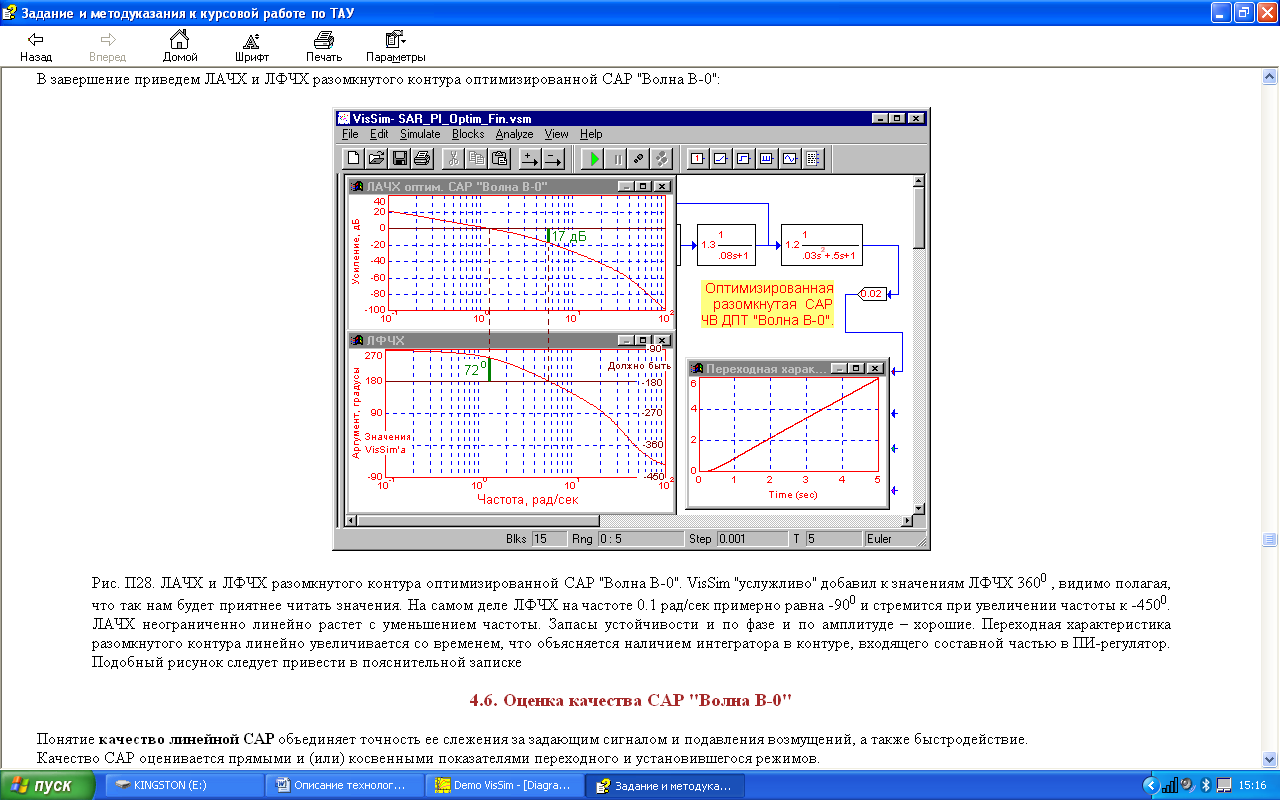
Рисунок.13.-ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР "Волна В-0".
VisSim "услужливо" добавил к значениям ЛФЧХ 3600 , видимо полагая, что так нам будет приятнее читать значения. На самом деле ЛФЧХ на частоте 0.1 рад/сек примерно равна -900 и стремится при увеличении частоты к -4500. ЛАЧХ неограниченно линейно растет с уменьшением частоты. Запасы устойчивости и по фазе и по амплитуде – хорошие. Переходная характеристика разомкнутого контура линейно увеличивается со временем, что объясняется наличием интегратора в контуре, входящего составной частью в ПИ-регулятор. Подобный рисунок следует привести в пояснительной записке
Заключение
В ходе выполнения курсовой работы была изучена работа технологического контура на основании которого была составлена функциональная схема регулирования. Для каждого из элементов функциональной схемы были определены собственные передаточные функции позволившие определить структурную схему. С учетом способа соединения звеньев была определена передаточная функция системы. Далее провели анализ системы с использованием программной оболочки VisSim для замкнутого и разомкнутого контура, соответственно. Анализ показал что при заданных условиях разомкнутый контур обладает устойчивостью так как переходный процесс является само выравнивающимся.
Рассмотрена общая методика дополнительные коррекции системы с использованием введение в контур ПИ-регулятора (на примере САР чистоты вращения ДПТ «Волна»). Данный метод параметрической коррекции САР а также оценка устойчивости системы по основным критериям будут проведены при выполнении дипломной работы.
Список источников разработки
Лукас В.А. Теория автоматического управления. – М.: Недра, 1990. – 416 с.
Топчеев Ю.И., Цыпляков А.П. Задачник по ТАУ. М.: Машиностроение, 1977.-592с.
Брюханов В.Н. и др. Теория автоматического управления. – М: Высшая школа, 2000 г.
Официальный сайт фирмы Visual Solution: http://www.vissim.com/