

2. Метрический и кинематический синтез и анализ исполнительного механизма
2.1 Длина кривошипа равна половине хода ползуна:
r = S/2 = 0,5/2 = 0,25, м.
Длину шатуна l
находим, ограничивая угол передачи
давления αmax=
[α]
= 30![]() :
:
l = r/tg [α] =0,25/tg 300 = 0,25/ 0,3 ≈ 0,8, м.
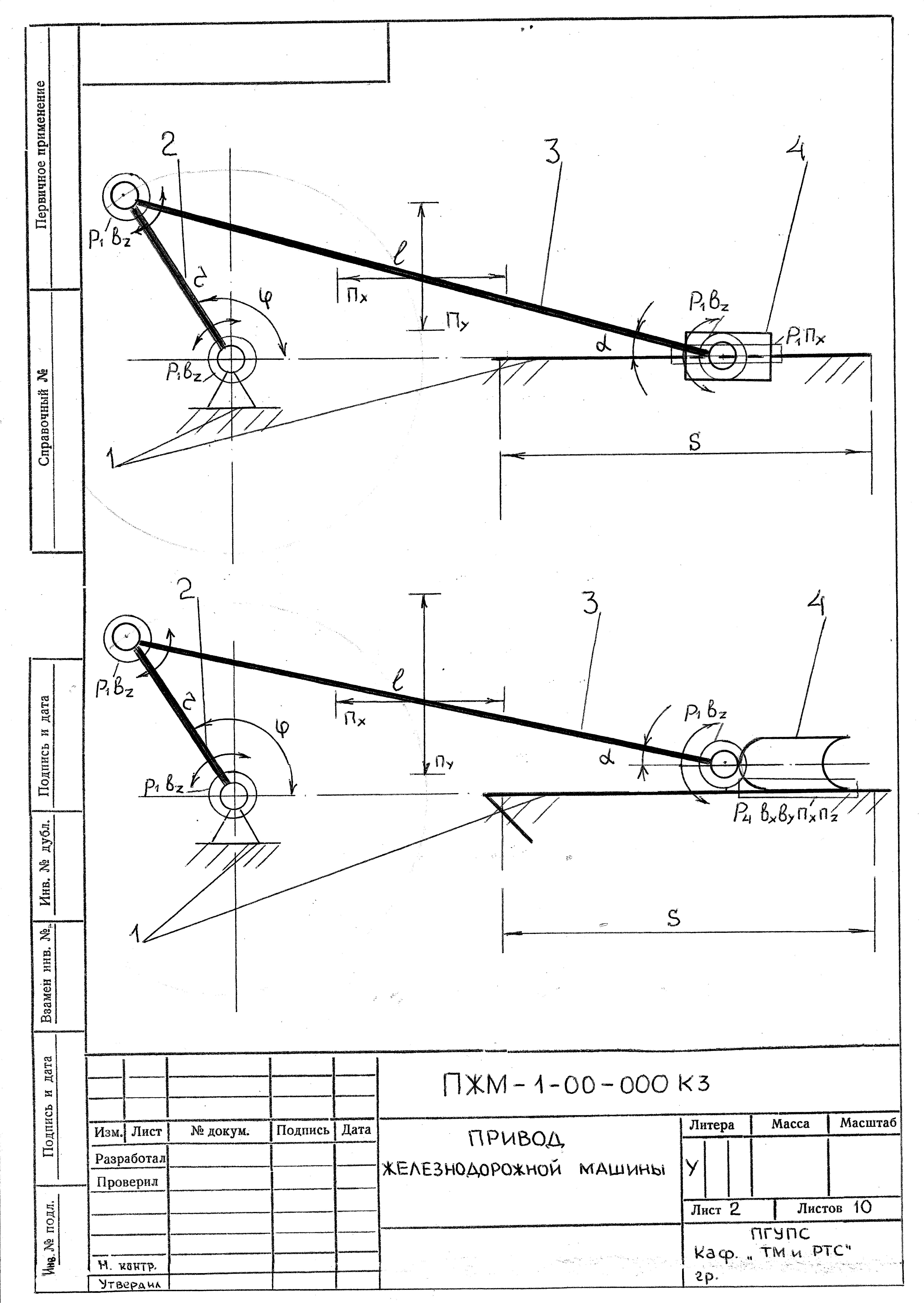
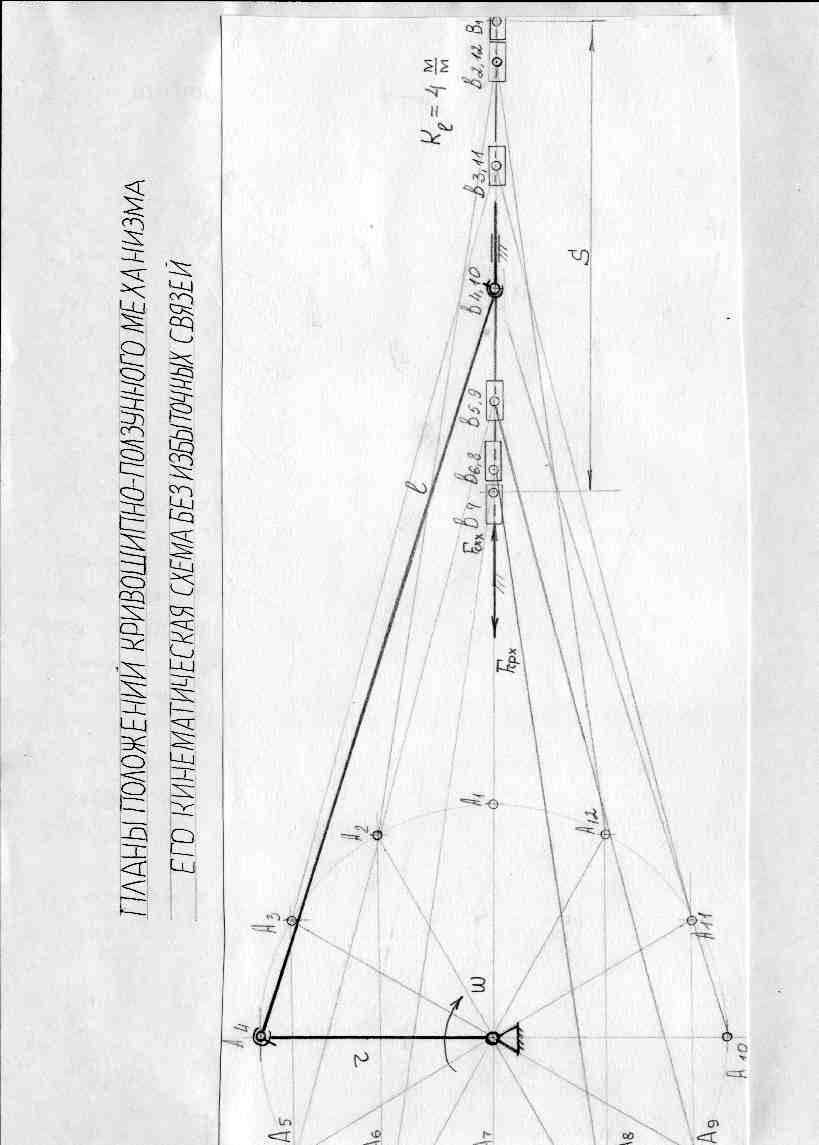
2.2 Планы положений механизма в масштабе Кl = 4 мм/мм представлены на чертеже. Здесь механизм (его кинематические схемы) при неизменном положении вершин стоек изображён при двух горизонтальных и двух вертикальных положениях кривошипа, при угле поворота кривошипа φ1, равном [α] и 1800 + [α] и ещё в шести промежуточных положениях кривошипа. При расположении кривошипа и шатуна на одной прямой линии ползун находится в крайних положениях, расстояние между которыми S = 0,5 м.
2.3 Продолжительность одного оборота кривошипа
TЦ = 2S/vС = 2∙0,5/2,32 ≈ 0,42 с.
2.4 Угловая скорость (средняя) вращения кривошипа
ω1 = 2π/T ≈ 2∙3,14/0,48 ≈ 15 1/с.
Функция положения ползуна
x = r cos φ1 + [l2 – (r sin φ1)2],
где x – расстояние от оси поворота кривошипа до центра шарнира на
ползуне;
функция скорости ползуна
v
= r
ω1[![]() φ1
+
(r/2l)
sin 2 φ1],
φ1
+
(r/2l)
sin 2 φ1],
где ω1 − угловая скорость кривошипа;
φ1 − угол поворота входного кривошипа, отсчитываемый от
горизонтальной оси по часовой стрелке, φ1 = ω1t.
Значение вычисленных скоростей при rω1 ≈ 3, 75 м/с, r/2l ≈ 0,16:
φ1, град |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
sin φ1 |
0 |
0,5 |
0,9 |
1 |
0,9 |
0,5 |
0 |
− 0,5 |
−0,9 |
− 1 |
-0,9 |
−0,5 |
sin 2φ1 |
0 |
0,9 |
0,9 |
0 |
−0,9 |
0,9 |
0 |
− 0,9 |
0,9 |
0 |
-0,9 |
−0,9 |
0,16 sin 2 φ1 |
0 |
0,1 |
0,1 |
0 |
−0,1 |
0,1 |
0 |
− 0,1 |
0,1 |
0 |
-0,1 |
−0,1 |
φ1 + 0,16 sin 2 φ1 |
0 |
0,6 |
1 |
1 |
0,8 |
0,6 |
0 |
− 0,6 |
−0,8 |
− 1 |
−1 |
−0,6 |
v, м/с |
0 |
2,3 |
3,75 |
3,75 |
2,4 |
1 |
0 |
−1 |
−2,4 |
−3,75 |
−3,75 |
−2,3 |
График изменения скорости в функции от угла поворота представлен на чертеже.
Находим средние скорости ползуна:
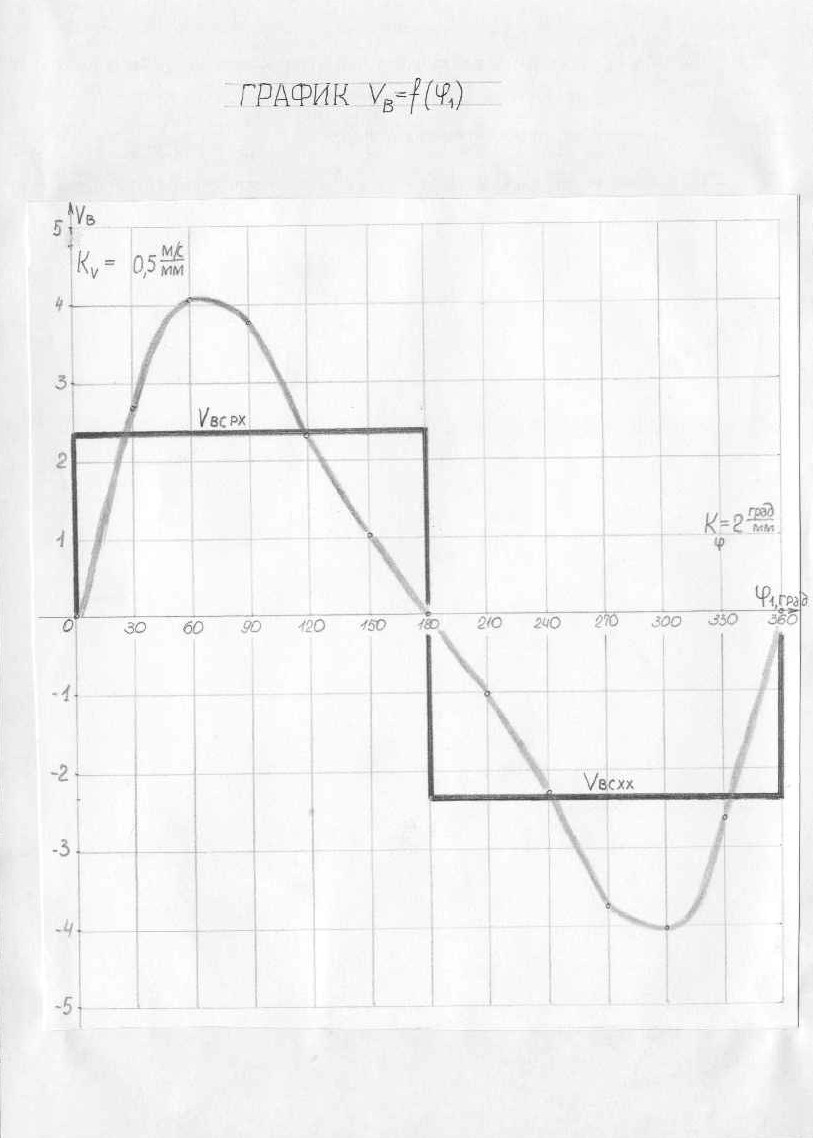
при рабочем
ходе vСРХ
=
![]() i
= 2,32 м/с;
i
= 2,32 м/с;
при холостом ходе vСХХ = i = − 2,32 м/с.
Эти скорости при прямом и обратном ходе одинаковые, совпадают с заданной скоростью и представлены в виде графика vC = f (φ1) на чертеже.
2. Подбор электродвигателя и типа редуктора
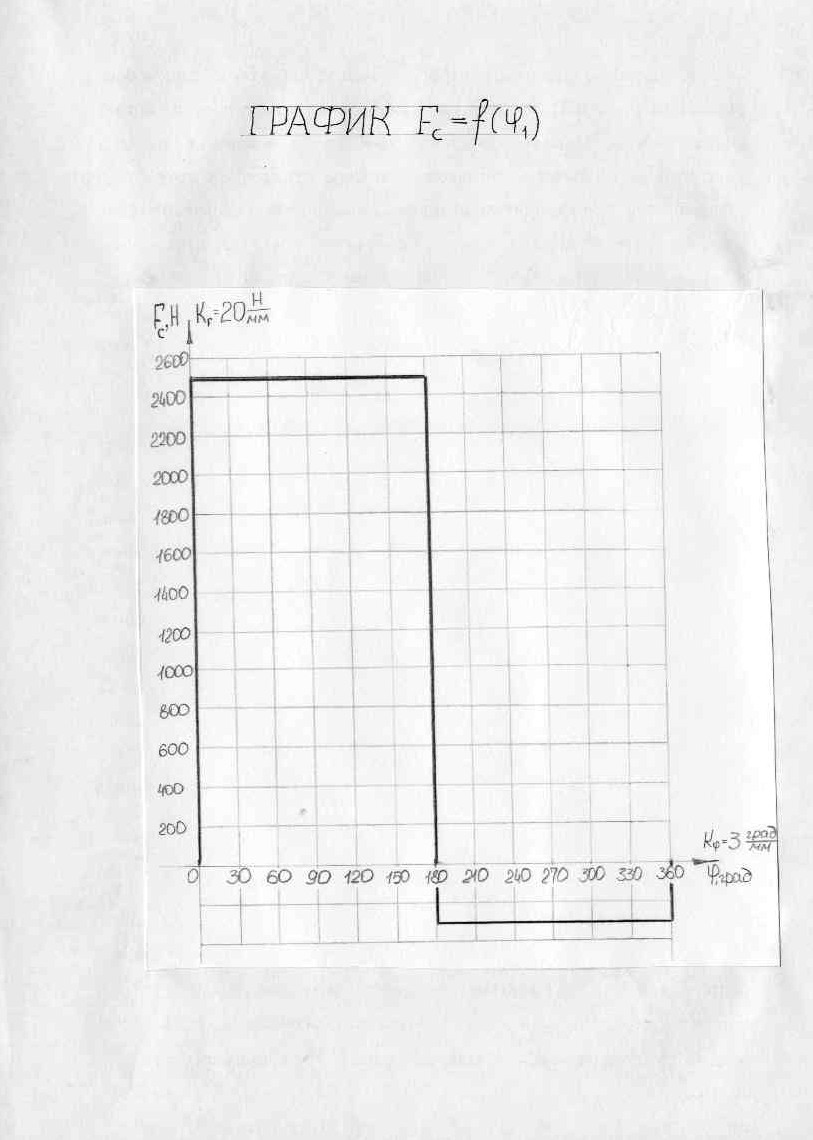
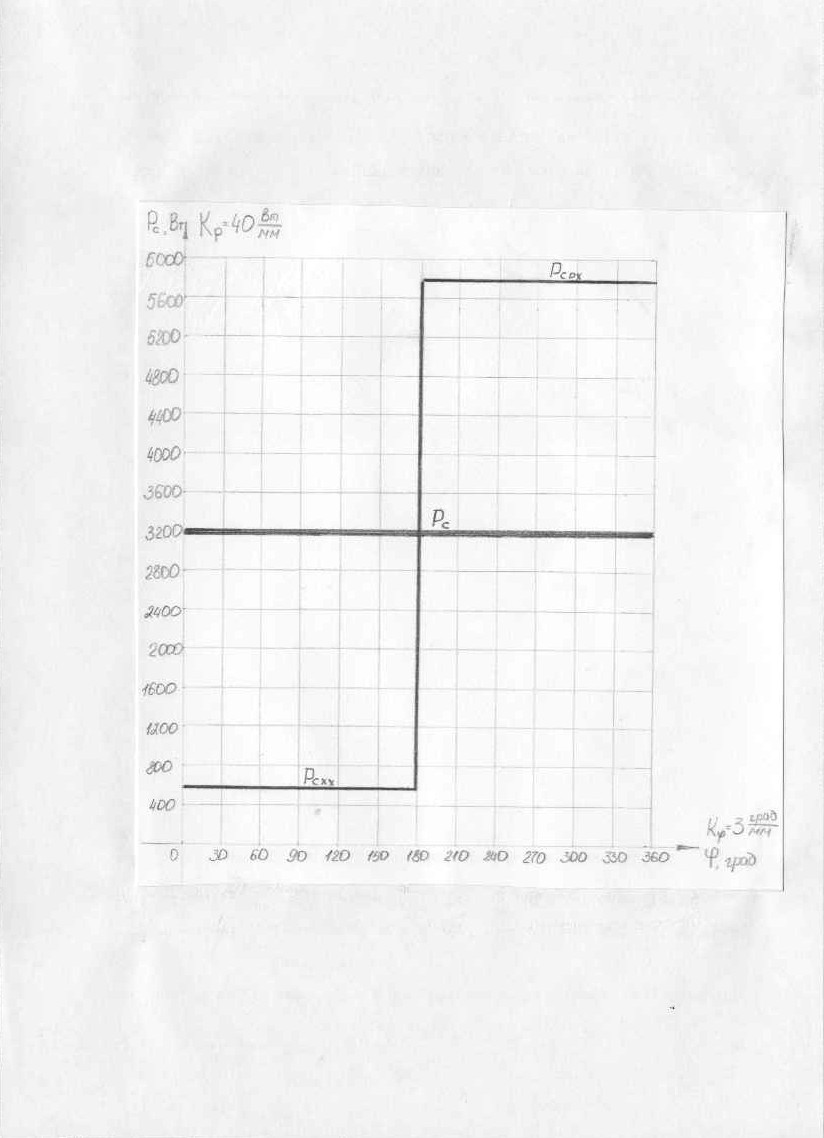
2.1 График изменения силы полезного сопротивления в функции от угла поворота φ1 кривошипа представлен на чертеже. Мощности сил полезного сопротивления перемещению исполнительного органа
на участке рабочего хода:
P![]() Вт;
Вт;
на участке холостого хода:
P![]() Вт.
Вт.
Среднее значение силы полезного сопротивления FСР = (2500 + 250)/2 = 1375 Н.
2.2 Средняя мощность силы полезного сопротивления:
P![]() Вт.
Вт.
2.3 Коэффициент полезного действия исполнительного механизма с четырьмя кинематическими парами (вращательных – качения, поступательной – скольжения) примем равным ηМ ≈ 0,99∙0,99∙0,99∙0,98 ≈ 0,95. Среднее значение мощности сил сопротивления вращению кривошипа
PК = PC/ ηМ = 3190/0,95 ≈ 3360 Вт.
Среднее значение момента сил сопротивления вращению кривошипа
TК = PC/ ω1 = 3360/15 ≈ 224 Н∙м.
Графики изменения мощностей сил полезного сопротивления в функции от угла поворота кривошипа представлены на чертеже.
2.4 В случае использования высокооборотного (ωДО = 314 1/с), среднеоборотного (ωДО = 157 1/с) и низкооборотного (ωДО ≈ 105 1/с) электродвигателя его скорость при передаче вращения на кривошип, вращающийся со скоростью 15 1/с необходимо уменьшить в u10 = 314/15 ≈ 21, в u20 = 157/15 ≈ 10 и в u30 = 105/15 ≈ 7 раз – это ориентировочное значение передаточного числа механизма-передачи, которое необходимо разместить между двигателем и кривошипом.
2.5 Возможные выполнения и компоновки зубчатых передач (редукторов), реализующих найденные передаточные числа:
при u ≈ 7…10 одноступенчатый цилиндрический внешнего зацепления; то же, внутреннего; то же, конический; то же, винтозубчатый; цилиндрический внешне-внутреннего зацепления; цилиндрический
планетарный нескольких выполнений – структурные схемы представлены на чертеже;
при u ≈ 20 одноступенчатый червячный; двухступенчатый цилиндрический внешнего зацепления; цилиндрический внешне-внутреннего зацепления; цилиндрический планетарный нескольких выполнений и др.
2.6 Для обоснованного выбора рационального выполнения редуктора исходных данных мало. Каждая из компоновок обладает своими достоинствами и недостатками. При незначительно различающихся характеристиках предпочтение отдаём компромиссному варианту – наиболее простому и дешёвому зубчатому цилиндрическому редуктору.
2.7 Максимально возможный коэффициент полезного действия одноступенчатого зубчатого цилиндрического редуктора ηР ≈ 0,97. При этом необходимая мощность двигателя составит величину:
PД = PК/ ηР = 3360/0,97 ≈ 3400 Вт.
2.8 По каталогу выбираем среднеоборотный электродвигатель переменного тока трёхфазный асинхронный единой серии А с двумя парами полюсов с ближайшей к Рд мощностью:
марка 4А100S4У3;
номинальная мощность РДН = 3000 Вт (перегрузка не превышает допустимых 12,5 %);
номинальная частота вращения nДН = 1435 об/мин, угловая скорость ωДН = π nДН/30 ≈ 150 1/с;
маховый момент ротора GD2 = 3,47·10-2 кгс·м2; момент инерции массы IД ≈ 8,8 ·10-4 кг·м2;
кратность пускового момента К = ТП/ТДН = 2.
2.9 Уточнённое значение передаточного числа редуктора:
uР = ωДН/ω1 = 150/15 = 10.
2.10 Необходимый движущий момент:
TД = PД / ωДН = 3400/150 ≈ 22,7.
Отношение TК/TД ≈ 224/22,7 ≈ 9,7должно равняться произведению uР на ηР, равному ≈ 10∙0,97 = 9,7, что, практически, и имеет место.