Открытость
Несмотря на многочисленные уверения в обратном, лишь некоторые версии PROFIBUS являются открытыми. Фактически компания Siemens все свои сети на базе RS-485 называет PROFIBUS, несмотря на то, что некоторые из них являются частнофирменным решением Siemens. С другой стороны, FOUNDATION fieldbus разработана в полностью открытой и нейтральной по отношению к различным производителям среде. Спецификации FOUNDATION fieldbus опубликованы и доступны всем желающим.
Кроме того, в ассоциации Fieldbus Foundation установлены такие правила, что любая часть сетевой технологии, будь то микросхемы или реализации протоколов, принимаются, только если для них существует несколько поставщиков. Различия между ассоциациями PNO и Fieldbus Foundation со всей очевидностью проявляются в структуре их руководящих органов. Совет директоров Fieldbus Foundation состоит из 11 членов, представляющих 11 различных компаний, в то время как совет директоров PNO состоит только из четырех членов, двое из которых являются сотрудниками компании Siemens. В версиях PROFIBUS, разработанных для высокоскоростного управления дискретными процессами, Siemens является единственным поставщиком необходимых высокопроизводительных микросхем.
Заключение
Хотя обе полевые шины FOUNDATION и PROFIBUS-PA могут использоваться в качестве цифровых аналогов схемы с аналоговым управлением, использующей сигналы с амплитудой 4-20 мА, архитектура FOUNDATION fieldbus, несомненно, обладает рядом преимуществ перед PROFIBUS-PA. Кроме значительно более высокого уровня комплексируемости системы, реализуемого FOUNDATION fieldbus, использование сложных компонентов пользовательского уровня позволяет перенести часть распределенного управления на уровень полевых устройств.
Вне всякого сомнения, FOUNDATION fieldbus - более открытый протокол, чем PROFIBUS-PA; стандарт FOUNDATION fieldbus разработан и поддерживается организацией, в состав которой входит большинство крупнейших производителей и поставщиков управляющих устройств и промышленного оборудования. И напротив, контроль над PROFIBUS-PA осуществляется одной компанией.
Хотя технология PROFIBUS-PA, вероятно, сможет полностью удовлетворить все потребности клиентов в настоящем и ближайшем будущем, эта технология, несомненно, является устаревшей по сравнению с открытой, постоянно совершенствующейся технологией FOUNDATION fieldbus, обладающей рядом уникальных возможностей.
Возможности CAN-протокола
Введение
CAN-протокол был разработан фирмой Robert Bosch GmbН для использования в автомобильной электронике, отличается повышенной помехоустойчивостью, надежностью и обладает следующими возможностями:
конфигурационная гибкость,
получение сообщений всеми узлами с синхронизацией по времени,
неразрушающий арбитраж доступа к шине,
режим мультимастер,
обнаружение ошибок и передача сигналов об ошибках,
автоматическая передача сбойных сообщений при получении возможности повторного доступа к шине,
различие между случайными ошибками и постоянными отказами узлов с возможностью выключения дефектных узлов,
работает по витой паре на расстоянии до 1 км.
Естественно, что все эти качества делают CAN-протокол весьма привлекательным для использования в производственных приложениях, тем более что он поддерживается рядом фирм-производителей микросхем, выпускающих недорогие устройства, которые аппаратно реализуют требования CAN-протокола и работают в широком температурном диапазоне.
СAN-протокол распространяется на следующие уровни:
Объектный уровень обеспечивает фильтрацию сообщений и обработку сообщений и состояний.
Транспортный уровень представляет собой ядро CAN-протокола. Он отвечает за синхронизацию, арбитраж, доступ к шине, разделение посылок на фреймы, определение и передачу ошибок и минимизацию неисправностей.
Физический уровень определяет, как именно будут передаваться сигналы,их электрические уровни и скорость передачи.
Физический уровень
Физический уровень определяется стандартом ISO11898 и характеризуется следующими возможностями.
Дифференциальное включение приемопередатчиков обеспечивает подавление синфазной помехи, при этом уровень сигналов составляет 1/3 от значения напряжения питания, причем само напряжение питания не определяется жестко. Например, типичные значения при напряжении питания +5 В приведены на рис. 1, причем доминирующим уровнем является нижний уровень, а рецессивным, соответственно, верхний

Максимальное расстояние между узлами — до 1 км.
Скорость обмена до 1 Мбит/с при длине линии 60 м.
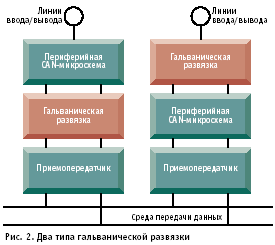
Возможность применения гальванической развязки, причем гальваническая развязка может устанавливаться либо между приемо-передающим буфером и микросхемой, обеспечивающей функции CAN, либо между микросхемой и остальной системой (рис. 2).