

I. Определение девиации по створу, магнитное направление которого известно.
В момент пересечения створа (рис. 3.11) на выбранном курсе берется отсчет компасного пеленга (КП). Наблюденная девиация вычисляется по формуле:
δ = МП − КП |
II. Определение девиации по створу, магнитное направление которого неизвестно.
При этом способе в качестве объекта для пеленгования используется створ любых неподвижных ориентиров.
При пересечении линии створа на каждом из 8 равноотстоящих компасных курсах (0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°) снимают значения компасных пеленгов створа (КП).
Рассчитывается значение магнитного пеленга (МП) по формуле:
|
№38 Магнитное склонение,девиация магнитного компаса
Угол в плоскости истинного горизонта наблюдателя между северной частью истинного и северной частью магнитного меридианов называется магнитным склонением и обозначается как d (рис. 3.3, 3.4).
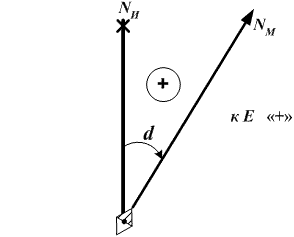

Рис. 3.3. Магнитное склонение (восточное) рис 3.4 западное
Магнитное склонение отсчитывается от NИ к востоку (Е) или западу (W) от 0° до 180°.
Если магнитный меридиан (NM) отклонен к востоку (к Е) от истинного меридиана (рис. 3.3), то магнитное склонение считается восточным и, при вычислениях, ему приписывается знак «+».
Значение магнитного склонения указывается на магнитных картах и используется для определения истинного меридиана по показанию магнитного компаса.
Девиация магнитного компаса – угол в плоскости истинного горизонта наблюдателя между северными частями магнитного и компасного меридианов (обозначается символом – δ - дельта) рис. 3.7.
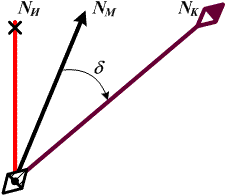
Рис. 3.7. Девиация магнитного компаса
Девиация магнитного компаса (δ) отсчитывается от северной части магнитного меридиана к Е или к W от 0° до 180°.
При вычислениях восточную (Е) девиацию принято считать положительной («+»), а западную (W) – отрицательной («–»).
Девиация магнитного компаса (δ) зависит от многих причин:
района плавания;
курса судна;
состояния корпуса судна;
работы электромеханизмов и др.
№39 Поправка магнитного компаса
Для перехода от компасных направлений по магнитному компасу к истинным направлениям и обратно служит общая поправка магнитного компаса (рис. 3.9, 3.10).
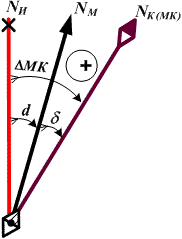
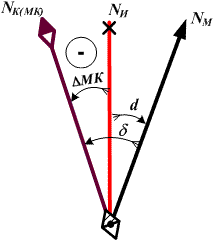
Рис. 3.9. Поправка магнитного компаса (положительная) отрицательная
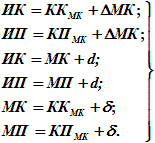
ΔМК = d + δ d – склонение, выбранное с МНК (карты) и приведенное к году плавания;
δ – девиация, выбираемая из РТШ по значению ККМК (из таблицы девиации магнитного компаса).
Поправка магнитного компаса – это горизонтальный угол в плоскости истинного горизонта наблюдателя между северной частью истинного и северной частью компасного (по магнитному компасу) меридианов.
Обозначается как ΔМК. Пределы ее измерения (изменения) от 0° до 180°.
Если компасный меридиан магнитного компаса (NKмк) отклонен к востоку (к Е) от истинного меридиана (NИ), то поправка магнитного компаса (ΔМК) считается положительной (рис. 3.9) и при вычислениях ей придается знак «+».
Если компасный меридиан магнитного компаса (NKмк) отклонен к западу (к W) от истинного меридиана (NИ), то поправка магнитного компаса (ΔМК) считается отрицательной (рис. 3.10) и при вычислениях ей придается знак «–».
№40 Исправление и перевод румбов
Переход от компасных направлений к истинным (или от компасных к магнитным) получил название – исправление румбов.(1 )Переход от одних направлений (магнитных или истинных) к другим (компасным) получил название – перевод румбов.(2)
 1*
1*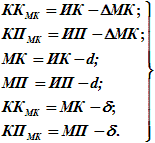 2*
2*
№41Курсоуказатели на современных судах морского флота
Типы курсоуказателей: Гирокомпасы(маятниковые,с косвенным управлением на ДНГ)-Основной ПКУ на всех конвенционных крупно- исреднетоннажных судах
2)Магнитные компасы(стрелочные,Бесстрелочные) -Резервный КУна всех конвенционных судах,на малых судах яхтах катерах
3)спутниковые компасы-Резервный КУ на конвенционны судах
основной КУ на малых судах, яхтах, катерах
4)системы инерциальной навигации(лазерные,волоконно оптические)-
Основной или резервный КУ на военных кораблях и подводных лодках
Резервный КУ на конвенционных крупно- и среднетон-нажных судах
№42 Основная еденица длины в судовождении
Для измерения расстояний в море, глубин, высот береговых ориентиров, а также скоростей судна, ветра и течения в судовождении применяются следующие единицы длины.
Морская миля(основная) — единица длины, равная длине одной минуте дуги меридиана земного эллипсоида.
1 миля = 1852 м
№43 Вспомогательные еденицы длины в судовождении
Для измерения расстояний в море, глубин, высот береговых ориентиров, а также скоростей судна, ветра и течения в судовождении применяются следующие единицы длины.
Морская миля — единица длины, равная длине одной минуте дуги меридиана земного эллипсоида.
1 миля = 1852,23 м
Кабельтов— единица длины, равная 0,1 мили, т. е. 185,2 м. В кабельтовых измеряют небольшие расстояния на море:
• расстояния между судами при оценке безопасности плавания;
• дальности, измеренные радиолокационными станциями.
Глубины морей и океанов, высоты гор и других ориентиров над уровнем моря выражаются в метрах.
При пользовании английскими картами и другими пособиями по судовождению можно встретить другие единицы длины:
сажень морская — единица длины, равная 1,83 м. Применяется для обозначения глубин на английских картах;
фут — единица длины, равная 30,48 см. Применяется для измерения высот предметов на берегу и малых глубин.
№44 Основная еденица скорости в судовождении
Основной единицей скорости, принятой в судовождении, является узел. Один узел соответствует скорости, при которой судно проходит за один час одну морскую милю: 1 уз = 1 миля/ч. В судовождении в узлах выражают скорости судов и морских течений.
№45 Класификация современных лагов
Относительные лаги.
В настоящее время на судах применяются индукционные, гидродинамические и радиодоплеровские лаги, измеряющие скорость относительно воды.
Абсолютные лаги
Под абсолютными понимаются лаги, измеряющие скорость судна относительно грунта. Разработанные в настоящее время абсолютные лаги являются гидроакустическими и делятся на доплеровские и корреляционные.
№46 Относительные лаги принцим их работы
Относительные лаги.
В настоящее время на судах применяются индукционные, гидродинамические и радиодоплеровские лаги, измеряющие скорость относительно воды.
Индукционные лаги.
Их действие основано на свойстве электромагнитной индукции. Согласно этому свойству при перемещении проводника в магнитном поле в проводнике индуктируется э.д.с., пропорциональная скорости его перемещения. С помощью специального магнита под днищем судна создаётся магнитное поле. Объём воды под днищем, на который воздействует магнитное поле лага, можно рассматривать как множество элементарных проводников электрического тока, в которых индуктируется э.д.с.: значение такой э.д.с. позволяет судить о скорости перемещения судна. С обрастанием корпуса судна индукционные лаги начинают давать заниженные показания.
Гидродинамические лаги.
Принцип действия основан на измерении гидродинамического давления, создаваемого скоростным напором набегающего потока воды при движении судна. Поправка гидродинамического лага, как правило, нестабильна. Основными причинами, обуславливающими её изменения во время плавания, являются дрейф судна, дифферент,
обрастание корпуса, качка и изменением района плавания. Рассчитать изменение поправки лага от влияния первых трёх причин не представляется возможным.
№47 Абсолютные лаги принцип их работы
Абсолютные лаги.
Под абсолютными понимаются лаги, измеряющие скорость судна относительно грунта. Разработанные в настоящее время абсолютные лаги являются гидроакустическими и делятся на доплеровские и корреляционные.
Гидроакустические доплеровские лаги (ГДЛ).
Принцип работы ГДЛ заключается в измерении доплеровского сдвига частоты высокочастотного гидро-акустического сигнала, посылаемого с судна и отражённого от поверхности дна. Результирующей информацией являются продольная и поперечная составляющей путевой скорости. ГДЛ позволяет измерить их с погрешностью до 0.1% . Разрешающая способность высокоточных ГДЛ составляет 0, 01 — 0, 02 уз. При установке дополнительной двух лучевой антенны ГДЛ позволяет контролировать перемещение относительно грунта носа и кормы, что облегчает управление крупнотоннажным судном при плавании по каналам, в узкостях и при выполнении швартовых операции. Большинство существующих ГДЛ обеспечивают измерение абсолютной скорости при глубинах под килём до 200-300 м. При больших глубинах лаг перестаёт работать или переходит в режим измерения относительной скорости, т.е. начинает работать от некоторого слоя воды как относительный лаг. Преимуществом является тот факт, что антенны ГДЛ не выступают за корпус судна. Для обеспечения их замены без докования судна они устанавливаются в клинкетах. Источниками погрешности ГДЛ могут быть: погрешность измерения доплеровской частоты; изменение углов наклона лучей антенны; наличие вертикальной составляющей скорости судна. Суммарная
погрешность по этим причинам у современных лагов не превышает 0.5%.
Корреляционные доплеровские лаги (ГКЛ).
Принцип действия ГКЛ заключается в измерении временного сдвига между отражённым от грунта акустическим сигналом, принятым на разнесенные по корпусу судна антенны. На глубинах до 200 м ГКЛ измеряет скорость относительно грунта и одновременно указывает глубину под килём. На больших глубинах он автоматически переходит на работу относительно воды. Достоинствами ГКЛ по отношению к ГДЛ являются независимость показаний от скорости распространения звука в воде и более надёжная работа на качке.
№48Поправка и коефициент лага
Поправка лага представляет собой относительную ошибку, взятую с обратным знаком и выраженную в процентах,
![]()
где S — действительное расстояние, пройденное судном; рол — разность отсчетов лага.
Однако для расчетов пройденного по лагу расстояния удобнее использовать не поправку, а коэффициент лага
КЛ = Sл/рол. (49)
Рассчитывается он с точностью до 0,01. Из выражения (49) получим
SЛ= ролКЛ. (50)
Если теперь сопоставить формулы (48) и (50), то легко можно прийти к следующим зависимостям между Δл и КЛ:
КЛ=1 + Δл/100; (51) Δл=(КЛ—1)100. (52)
При положительной поправке лага коэффициент его будет больше единицы.