

Московский Государственный Авиационный Институт
(Государственный Технический Университет)
Курсовая Работа по предмету:
Основы Инженерного Творчества
Тема: Кинематика и динамика системы гонщик-велосипед
Выполнил: студент гр. 03-203
Абрамов С.В
Работу принял: преподаватель
Шлеёнкин Л.А.
Москва 2011
Оглавление:
Структура системы гонщик-велосипед
Кинематика системы в целом
Кинематика колеса
Кинетостатика системы
Система гонщик-велосипед в целом
Сравнительные оценки на основе кинетостатических зависимостей.
Динамика системы гонщик-велосипед
Структура системы гонщик-велосипед
Сама система состоит из двух объектов – управляющего и управляемого – и ряда таких внешних условий, как аэродинамические, механические и кинематические воздействия. Управляющий объект – гонщик, воспринимая информацию о состоянии дорожного покрытия, кинематических (траектория, скорость, ускорение), аэродинамических, тактико-технических и других условий гонки, формирует с помощью центральной нервной системы (ЦНС) целенаправленное воздействие на объект управления таким образом, чтобы создать наиболее эффективные условия передачи энергии от биологического двигателя – гонщика к потребителю – велосипеду в целях достижения наивысшего спортивно-технического результата.
Функция педалирования характеризуется двумя параметрами: крутящим моментом, определяемым касательной силой при педалировании, и частотой педалирования, совокупность которых является своеобразной амплитудно-частотной характеристикой гонщика. Регулятором совмещённого действия этих двух факторов является переключатель скоростей на шоссейном велосипеде или предварительно установленные звёздочки на трековом велосипеде. Такой регулятор позволяет получать рациональные передаточные отношения, с использованием которых гонщик может в экстремальные моменты гонки развивать максимальную мощность, а в остальные периоды гонки педалировать с минимальными затратами энергии. Учитывая, что шоссейные гонки продолжаются в течении нескольких часов, целенаправленное управление функциональными действиями гонщика приобретает решающее значение.
Функция управления фактически сводится к трём основным процессам: маневрированию (с учётом поддержания равновесного устойчивого движения системы), торможению и переключению скоростей. Обратная связь по каналам этой функции осуществляется с использованием параметров и характеристик трассы гонки.
В действительности все элементы рассматриваемой системы сами по себе представляют весьма сложные и недостаточно изученные объекты, между которыми осуществляются многоканальные связи, позволяющие реализовывать гармоничные и близкие к оптимальным действия гонщика по достижению наивысшего спортивно-технического результата.
Кинематика системы в целом
Траектория движения системы гонщик-велосипед ограниченна трассой – поверхностью трекового полотна, шоссе или кроссовой дороги. Во всех случаях, за исключением свободного полёта при преодолении препятствий, движение велосипеда полагает непрерывный контакт с поверхностью трассы. Именно этот контакт лежит в основе механики движения велосипеда и его управления.
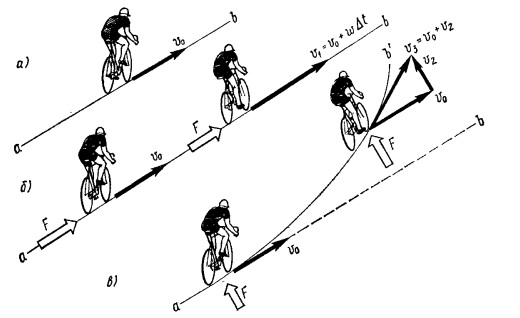
Согласно законам механики, изменения скорости и направления движения системы гонщик – велосипед не могут происходить без воздействия на неё внешних сил. При отсутствии последних система стремится сохранить состояние покоя или равномерного прямолинейного движения. В этом случае вектор скорости системы V0 совпадает с направлением движения ab, что мы и видим на рисунке. Для изменения скорости и направления движения системы необходима внешняя сила F, тем большая, чем больше масса системы m и ускорение w, которое ей требуется сообщить. Масса системы является мерой её инертности, т.е. способности сохранять неизменными параметры движения. Так, при воздействии внешней силы F со стороны дорожного покрытия в зоне контакта ведущего колеса с дорогой система получает ускорение w в течении времени дельта(T) и скорость движения становится равной V1=V0+w*дельта(T)
Действие внешней силы способно изменить не только скорость, но и направление движения. Так, под действием силы F, направленной перпендикулярно к траектории движения, система приобретает дополнительную скорость V2. Суммарная скорость V3=V0+V2, будучи суммой двух векторов, является скоростью движения системы по траектории ab’ в отличии от скорости V0 прямолинейного движения.
Т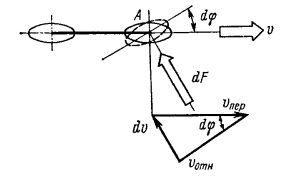 аким
образом, только наличие внешней силы
позволяет осуществить поворот велосипеда,
т.е. изменить траекторию движения
системы. Для анализа действия этой
системы будем считать, что велогонщик,
двигаясь прямолинейно со скоростью V
(как показано на схеме оценки условий,
обеспечивающих поворот велосипеда),
повернул руль в точке A
на угол dф.
Пусть этот поворот осуществлен в момент
времени t.
Можно считать, что в момент времени t+dt
переносная скорость системы Vпер
в силу закона инерции практически не
изменится ни по величине, ни по направлению.
При повороте на угол dф
абсолютная
скорость точки A
контакта колеса с дорогой уже не равна
нулю, так как переносная скорость оси
Vпер
и относительная скорость Vотн
точки A
колеса не лежит на одной прямой. Скорость
точки A
становится равной dv
и направлена
в сторону угла поворота dф.
аким
образом, только наличие внешней силы
позволяет осуществить поворот велосипеда,
т.е. изменить траекторию движения
системы. Для анализа действия этой
системы будем считать, что велогонщик,
двигаясь прямолинейно со скоростью V
(как показано на схеме оценки условий,
обеспечивающих поворот велосипеда),
повернул руль в точке A
на угол dф.
Пусть этот поворот осуществлен в момент
времени t.
Можно считать, что в момент времени t+dt
переносная скорость системы Vпер
в силу закона инерции практически не
изменится ни по величине, ни по направлению.
При повороте на угол dф
абсолютная
скорость точки A
контакта колеса с дорогой уже не равна
нулю, так как переносная скорость оси
Vпер
и относительная скорость Vотн
точки A
колеса не лежит на одной прямой. Скорость
точки A
становится равной dv
и направлена
в сторону угла поворота dф.
Для изменения скорости движения на величину dv необходимо приложить внешнее усилие, которым может быть только сила трения колеса о поверхность дороги. Следовательно, при повороте колеса появляется сила трения dF, действующая на колесо в направлении dv, чем и обеспечивается необходимое ускорение системы. Очевидно, что при отсутствии сил трения или при недостаточных их значениях контролируемый поворот становится невозможным.
Практика показывает, что одновременно с поворотом необходимо осуществить наклон велосипеда в сторону центра кривизны, чтобы компенсировать центробежные силы инерции. Требуемый угол наклона Ѱ приближенно можно определить из известного равенства:
![]()
Где [u] – допустимое значение коэффициента сцепления колеса с дорожным покрытием; R – радиус кривизны виража, v – скорость движения; g – ускорение свободного падения. Это равенство получено на основании анализа сил, возникающих в системе гонщик – велосипед при прохождении поворота с плоским дорожным покрытием, как показанно на рисунке ниже.
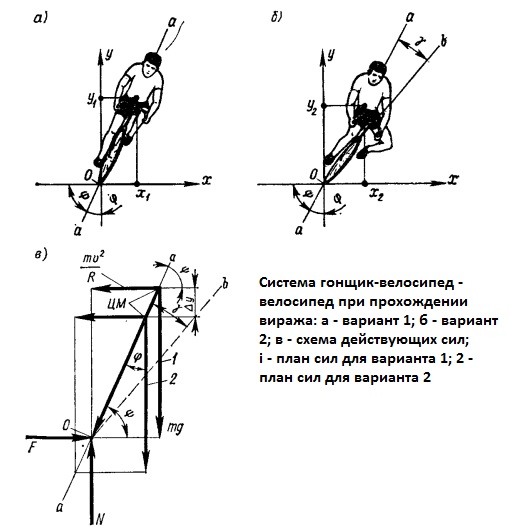
Ясно, что гонщик должен находиться вертикально, иначе он упадёт. Но его вертикаль aa не совпадает с земной Oy, она наклонена под некоторым углом ф, который не зависит от массы m гонщика, а зависит от радиуса кривизны поворота и скорости его прохождения. Однако масса системы определяет величину силы реакции N дорожного полотна на колёса велосипеда и величину силы трения F в зоне контакта колеса с дорогой. Устойчивость системы гонщик-велосипед обеспечивается балансом моментов центробежной силы F(u)=mv2/R и гравитационной силы Fг=mg.
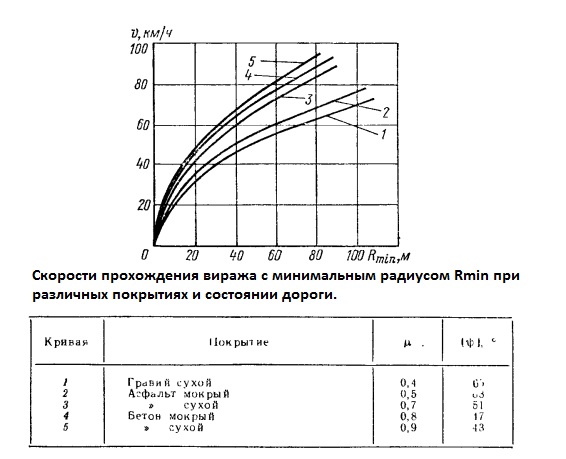
Для обеспечения предельной скорости прохождения виража, определяемой допустимым значением [u], применяют приём смещения центра масс (ЦМ) системы в сторону, противоположную центру кривизны виража. Это позволяет сместить ЦМ вниз на величину дельтаY=Y1-Y2, что, однако, не изменяет условий взаимодействия системы с поверхностью дороги, определяемых углом Ѱ. Максимально возможные скорости прохождения виражей при различных покрытиях и состоянии дороги показаны на рисунке ниже. Аналогичный анализ может быть проведён и для условий прохождения наклонных виражей велосипедного трека, что на указано на таблице, где система координат x1Oy1 полотна трека развёрнута на угол B относительно горизонта.
В
зависимости от скорости движения системы
радиус кривизны R
траектории движения ЦМ изменяется от
Rmax
при V=0
до Rmin
при V=Vmax.
Уравнение угла наклона в данном случае
требует уточнения в связи с учётом
радиуса кривизны траектории движения
ЦМ системы гонщик-велосипед. В таком
случает скорость прохождения виража в
зависимости от угла Ф выразится
уравнением![]()
Это уравнение приближенно описывает мгновенное значение скорости движения в данной точке виража. Общая картина изменения кинематических характеристик системы при прохождении виражей значительно сложнее и зависит от целого ряда параметров: таких, как радиус кривизны виража, координаты его положений, профиль виража, вид покрытия его поверхности, механические характеристики системы гонщик-велосипед.
Приёмы прохождения плоского виража существенно отличаются от приёмов прохождения наклонного виража.