

Федеральное агентство по образованию
Новосибирский технологический институт
Московского государственного университета дизайна и технологии
(филиал)
АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
Методические указания к выполнению контрольных работ
и расчетно-графических работ по дисциплине
«Теория механизмов и машин»
для всех специальностей
Новосибирск 2007
Разработчик доц., к.т.н. Ермолаев В.Ф.
Рецензент проф., д.т.н. Подгорный Ю.И.
Работа выполнена на кафедре механики НТИ МГУДТ (филиал)
1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Рассмотрим в качестве примера плоский рычажный шестизвенный механизм (рисунок 1), параметры которого приведены в таблице 1.

Таблица 1 - Параметры плоского шестизвенного механизма
|
Направление вращения звена 1 |
Положение
|
Размеры звеньев, м |
||||||
АВ |
ВC |
СD |
DE |
EF |
a |
b |
|||
191 |
+ |
120o |
0,06 |
0,140 |
0,120 |
0,080 |
0,160 |
0,080 |
0,04 |
Число степеней свободы плоских механизмов рассчитывают по формуле [1]:
![]() ,
(1)
,
(1)
где
![]() - число подвижных звеньев,
- число подвижных звеньев,
![]() - число кинематических пар пятого класса,
- число кинематических пар пятого класса,
![]() - число кинематических пар четвертого
класса.
- число кинематических пар четвертого
класса.
Для данного механизма:
![]()
К инематические
пары механизма приведены на рисунке 2.
инематические
пары механизма приведены на рисунке 2.
Вращательные и поступательные кинематические пары относятся к парам 5 класса (рисунок 2).
Любой плоский рычажный механизм, то есть механизм с низшими парами или парами 5 класса, состоит из механизма первого класса (входного звена с одной степенью свободы) и структурных групп звеньев с нулевой степенью подвижности (групп Ассура). Группа Ассура подчиняется формуле
![]() или
или
![]()
Из последнего уравнения следует, что число подвижных звеньев может быть только четным, а число пар 5 класса кратно трем. Простейшая группа Ассура состоит из двух звеньев и трех кинематических пар. По классификации И.И. Артоболевского такие группы Ассура относятся ко второму классу или двухповодковым группам [1].
Для установления класса механизма следует разложить его на механизм первого класса и группы Ассура (рисунок 3). Рассматриваемый механизм относится ко второму классу, так как содержит только группы Ассура второго класса.

2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Кинематический анализ – определение движения звеньев механизма по заданному движению начальных звеньев.
Графические и графоаналитические методы анализа наиболее наглядны и просты в исполнении, но неточны. Рассмотрим метод планов скоростей и ускорений, который относится к графоаналитическим методам.
Планом скоростей (ускорений) механизма называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям (ускорениям) различных точек механизма в данный момент.
Сформулируем свойства планов скоростей и ускорений:
1) векторы абсолютных скоростей (ускорений) направлены из полюса;
2) векторы, соединяющие концы векторов абсолютных скоростей (ускорений), есть векторы относительных скоростей (ускорений);
3) точки, у которых скорости (ускорения) равны нулю, расположены в
полюсе;
![]() 4)
векторы относительных скоростей (полных
относительных ускорений) образуют на
плане скоростей (ускорений) фигуру,
подобную жесткому контуру на плане
механизма;
4)
векторы относительных скоростей (полных
относительных ускорений) образуют на
плане скоростей (ускорений) фигуру,
подобную жесткому контуру на плане
механизма;
5) планы скоростей и ускорений позволяют определять величину и направление угловых скоростей и ускорений.
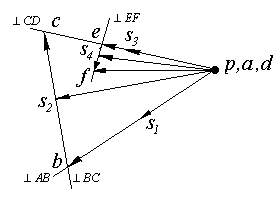
Для механизма, положение которого
определяется углом
![]() (рисунок 1), на рисунке 4 приведен план
скоростей, а на рисунке 5 – план ускорений.
(рисунок 1), на рисунке 4 приведен план
скоростей, а на рисунке 5 – план ускорений.
![]()
Рисунок 4 – План скоростей шестизвенного
рычажного механизма (![]() ).
).
Входное (ведущее) звено АВ совершает
вращательное движение c
постоянной угловой скоростью
![]() ,
модуль скорости точки В определяется
по формуле:
,
модуль скорости точки В определяется
по формуле:
![]() .
(2)
.
(2)
На поле чертежа произвольно выбирается
точка
![]() - полюс плана скоростей (рисунок 4). Из
точки
откладывается произвольной длины
отрезок
- полюс плана скоростей (рисунок 4). Из
точки
откладывается произвольной длины
отрезок
![]() в мм (в соответствии с рисунком 4
в мм (в соответствии с рисунком 4
![]() )
перпендикулярный АВ и направленный
в сторону вращения АВ. Точка А
звена АВ неподвижна и будет находиться
в полюсе
плана. Масштаб плана скорости определяется
как
)
перпендикулярный АВ и направленный
в сторону вращения АВ. Точка А
звена АВ неподвижна и будет находиться
в полюсе
плана. Масштаб плана скорости определяется
как
![]() .
.
В плоскопараллельном движении скорость точки С определяется из системы уравнений:
![]()
![]() (3)
(3)
Относительные скорости
![]() и
и
![]() направлены перпендикулярно звеньям ВС
и CD. Точка D
звена CD неподвижна и
будет находиться в полюсе
направлены перпендикулярно звеньям ВС
и CD. Точка D
звена CD неподвижна и
будет находиться в полюсе
![]() плана скоростей. Через точку
плана скоростей. Через точку
![]() плана скоростей проводим прямую
перпендикулярно звену ВС, а через
полюс
проводим прямую перпендикулярно звену
CD. Точка
плана скоростей проводим прямую
перпендикулярно звену ВС, а через
полюс
проводим прямую перпендикулярно звену
CD. Точка
![]() пересечения этих прямых будет являться
вектором абсолютной скорости точки С,
а отрезок
пересечения этих прямых будет являться
вектором абсолютной скорости точки С,
а отрезок
![]() в
масштабе
в
масштабе
![]() будет являться вектором скорости
будет являться вектором скорости
![]() .
Отрезок
.
Отрезок
![]() будет являться вектором относительной
скорости
.Модули
скоростей
и
определятся как
будет являться вектором относительной
скорости
.Модули
скоростей
и
определятся как
![]()
Скорость точки Е определяется на
основании свойств подобия (векторы
относительных скоростей образуют на
плане скоростей фигуру, подобную жесткому
контуру на плане механизма), для чего
отрезок
![]() на плане скоростей разбивается
пропорционально отрезкам СЕ и ЕD
на плане механизма:
на плане скоростей разбивается
пропорционально отрезкам СЕ и ЕD
на плане механизма:
![]() ,
откуда
,
откуда
![]() .
Модуль скорости точки Е определится
как
.
Модуль скорости точки Е определится
как
![]()
Скорость точки F определяется из следующего уравнения:
![]() .
(4)
.
(4)
Скорость
![]() при поступательном движении параллельна
направляющим ползуна, а относительная
скорость
при поступательном движении параллельна
направляющим ползуна, а относительная
скорость
![]() направлена перпендикулярно звену EF.
Скорость точки F
определяется в соответствии с уравнением
(4): из точки
направлена перпендикулярно звену EF.
Скорость точки F
определяется в соответствии с уравнением
(4): из точки
![]() проводится прямая перпендикулярно
звену EF, а из полюса
прямая параллельно направляющим ползуна.
Точка
проводится прямая перпендикулярно
звену EF, а из полюса
прямая параллельно направляющим ползуна.
Точка
![]() пересечения этих двух прямых и будет
концом вектора скорости точки F,
а отрезок
пересечения этих двух прямых и будет
концом вектора скорости точки F,
а отрезок
![]() в масштабе
будет вектором
в масштабе
будет вектором
![]() .
Отрезок
.
Отрезок
![]() будет являться вектором относительной
скорости
будет являться вектором относительной
скорости
![]() .
Модули скоростей
и
определятся как
.
Модули скоростей
и
определятся как
![]()
Скорости
центров масс звеньев определяются на
основании свойств подобия (свойство
планов скоростей и ускорений пункт 4).
Например, скорость центра масс
![]() звена 2 будет являться вектором
звена 2 будет являться вектором
![]() ,проведенным
из полюса
к середине отрезка
,проведенным
из полюса
к середине отрезка
![]() :
:
![]()
Аналогично определяются скорости центров масс других звеньев.
Построение плана ускорений (рисунок 5) производится в следующей последовательности. Ускорение точки В определится из следующего уравнения:
![]() (5)
(5)
Нормальное ускорение точки В
![]() направлено по звену АВ к центру
вращения А, а его модуль определится
по формуле:
направлено по звену АВ к центру
вращения А, а его модуль определится
по формуле:
![]() (6)
(6)
Ведущее звено АВ вращается с
постоянной угловой скоростью
![]() ,
тогда его угловое ускорение
,
тогда его угловое ускорение
![]() равно нулю. Тангенциальное ускорение
точки В определяется по формуле
равно нулю. Тангенциальное ускорение
точки В определяется по формуле
![]() ,
и также равно нулю. На поле чертежа
произвольно выбирается точка
,
и также равно нулю. На поле чертежа
произвольно выбирается точка
![]() - полюс плана ускорений. Из точки
откладывается произвольной длины
отрезок
- полюс плана ускорений. Из точки
откладывается произвольной длины
отрезок
![]() в мм (в соответствии с рисунком 5
в мм (в соответствии с рисунком 5
![]() )
параллельно АВ и направленный от
точки В к точке А. Точка А
звена АВ неподвижна и будет находиться
в полюсе
плана. Тогда в соответствии с уравнением
(6) полное ускорение точки В равно
его нормальному ускорению:
)
параллельно АВ и направленный от
точки В к точке А. Точка А
звена АВ неподвижна и будет находиться
в полюсе
плана. Тогда в соответствии с уравнением
(6) полное ускорение точки В равно
его нормальному ускорению:
![]() =
.
Масштаб плана ускорения определяется
как
=
.
Масштаб плана ускорения определяется
как
![]()

В плоскопараллельном движении ускорение точки С определяется из системы уравнений:
![]() (7)
(7)
Нормальные ускорения точки С
![]() и
и
![]() направлены из точки С параллельно
звеньям ВС и СD,
а тангенциальные ускорения
направлены из точки С параллельно
звеньям ВС и СD,
а тангенциальные ускорения
![]() и
и
![]() - перпендикулярно звеньям ВС и СD.
Модули нормальных ускорений точки С
определяются по формулам:
- перпендикулярно звеньям ВС и СD.
Модули нормальных ускорений точки С
определяются по формулам:

Ускорение точки D
равно нулю. Последовательность графических
построений по уравнениям (7) приведена
на плане ускорений (рисунок 5). Вначале
из точек
и
плана ускорений откладываются отрезки
![]() и
и
![]() ,
из концов которых проводятся линии
действия тангенциальных ускорений
,
из концов которых проводятся линии
действия тангенциальных ускорений
![]() и
и
![]() .
Точка
.
Точка
![]() пересечения этих линий и будет концом
вектора абсолютного ускорения
пересечения этих линий и будет концом
вектора абсолютного ускорения
![]() .
Линия
- план ускорений звена 2, а линия
.
Линия
- план ускорений звена 2, а линия
![]() - план ускорений звена 3.
- план ускорений звена 3.
Ускорение точки Е определяется
также на основании свойств подобия
отрезков на плане ускорений и жестких
контуров на кинематической схеме
механизма:![]() ,
откуда отрезок
,
откуда отрезок
![]() .
Модуль ускорения точки Е определится
как
.
Модуль ускорения точки Е определится
как
![]()
Ускорение точки F определяется из следующего уравнения:
![]() .
(8)
.
(8)
Ускорение
![]() при поступательном движении параллельно
направляющим ползуна. Нормальное
ускорение
при поступательном движении параллельно
направляющим ползуна. Нормальное
ускорение
![]() направлено из точки F
параллельно звену EF.
Модуль вектора
определяется по формуле
направлено из точки F
параллельно звену EF.
Модуль вектора
определяется по формуле
![]() .
.
Последовательность построений по
уравнению (8) на плане ускорений: из
полюса
проводится линия параллельно направляющим
ползуна, а из точки
![]() проводится линия параллельно звену 4,
вдоль которой (от точки F
к точке Е) откладывается отрезок
проводится линия параллельно звену 4,
вдоль которой (от точки F
к точке Е) откладывается отрезок
![]() .
Так как отрезок
.
Так как отрезок
![]() ,
изображающий вектор
,
мал по сравнению с другими, то им можно
пренебречь, и линия действия
,
изображающий вектор
,
мал по сравнению с другими, то им можно
пренебречь, и линия действия
![]() проводится из точки
.Точка
пересечения этих линий будет концом
вектора абсолютного ускорения
проводится из точки
.Точка
пересечения этих линий будет концом
вектора абсолютного ускорения
![]() .
.
Ускорение центров масс звеньев 2, 3 и 4 определяются также как и их скорости из свойств подобия.
По планам скоростей и ускорений определяются также угловые скорости и угловые ускорения звеньев:
![]()
![]()
![]() .
.
Для
определения направления угловой
скорости, например, звена 2, вектор
![]() (вектор относительной скорости точки
С при вращении звена 2 вокруг точки
В) переносится мысленно с плана
скоростей в точку С звена 2 на плане
механизма (
(вектор относительной скорости точки
С при вращении звена 2 вокруг точки
В) переносится мысленно с плана
скоростей в точку С звена 2 на плане
механизма (![]() направлено против часовой стрелки или
его направление положительное). Аналогично
определяется направление
направлено против часовой стрелки или
его направление положительное). Аналогично
определяется направление
![]() по вектору относительного тангенциального
ускорения
(
направлено также против часовой стрелки
или имеет положительное направление).
по вектору относительного тангенциального
ускорения
(
направлено также против часовой стрелки
или имеет положительное направление).
3 СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА
Задачей силового анализа механизма является определение реакций в кинематических парах механизма и уравновешивающих сил или моментов при известных внешних силах и заданном законе движения ведущих звеньев.
При решении задачи силового анализа механизмов используется принцип Даламбера, согласно которому звено механизма может рассматриваться как находящееся в равновесии, если ко всем внешним силам, действующим на него, добавить силы инерции. Уравнения равновесия в этом случае называют уравнениями кинетостатики.
Определение сил, действующих на звенья механизма
3.1.1 Определение сил тяжести звеньев
Силы тяжести звеньев рычажного типа определяются по формуле
![]() ,
(9)
,
(9)
где
![]() - масса звена;
- масса звена;
![]() - ускорение свободного падения.
- ускорение свободного падения.
Масса звеньев рычажного типа задается зависимостью:
![]() ,
(10)
,
(10)
где
-
масса звена, кг;
![]() - длина звена, мм;
- длина звена, мм;
![]() - коэффициент, величина которого задается
преподавателем в пределах от 0,001 до
0,003 кг/мм.
- коэффициент, величина которого задается
преподавателем в пределах от 0,001 до
0,003 кг/мм.
Масса ползуна задается как
![]() ,
,
где j – любое целое число, задаваемое преподавателем.
Силы полезного сопротивления
![]() прикладываются к ползунам, направляются
в сторону противоположную их движению,
численное значение задается в двадцать
раз больше силы тяжести звена АВ.
прикладываются к ползунам, направляются
в сторону противоположную их движению,
численное значение задается в двадцать
раз больше силы тяжести звена АВ.
Для рассматриваемого механизма принимаем
![]() и
и
![]() 3,
тогда
3,
тогда
![]() (Н);
(Н);
![]() (Н).
(Н).
Аналогично определяются силы тяжести других звеньев. Результаты расчета сил тяжести приведены в таблице 2.
Таблица 2 - Результаты расчета сил тяжести
|
|
||||
|
|
|
|
|
|
1,8 |
4,2 |
3,6 |
4,8 |
5,4 |
36 |