

1 Синтез и анализ рычажного механизма
Исходные данные
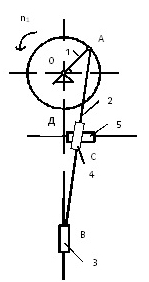
Кинематическая схема заданного механизма приведена на рисунке 2.
Геометрические
размеры и другие заданные постоянные
параметры приведены в таблице 1.1. Согласно
рекомендациям в заданиях вес звена 5
принят
![]()
 Рисунок
2 - Кинематическая схема рычажного
механизма
Рисунок
2 - Кинематическая схема рычажного
механизма
Таблица 1.1 - Заданные параметры механизма
L0A, м |
LAB, м |
L0Д, м |
n1, об./мин |
|
0,06 |
0,24 |
0,1 |
400 |
45 |
1.2 Построение планов положений
Для построения планов положений механизма принимают масштаб
![]() .
.
Заданные размеры механизма Li в принятом масштабе ks изображаются чертежными размерами li, определяемые по выражению;
![]() (1.2.1)
(1.2.1)
Чертежные размеры механизма, определенные по формуле (1.2.1), приведены в таблице 1.2.
Таблица 1.2 - Чертежные размеры звеньев
механизма, мм.
OA |
AB |
OД |
60 |
240 |
100 |
Используя найденные чертежные размеры, на листе 1 проекта построены крайние и заданное положение механизма.
 1.3
Структурный анализ
1.3
Структурный анализ
Структурная схема механизма приведена на рис. 2, где подвижные звенья обозначены арабскими цифрами (1 - кривошип, 2 и 4 - шатуны, 3 - коромысло, 5 - ползун). Кинематические пары V класса обведенными кружками.
Поскольку механизм плоский, его степень подвижности определяется по формуле П.Л.Чебышева:
W = 3n-2pV-pIV, (1.3.1)
где n = 5 - количество подвижных звеньев,
pv = 7 – количество кинематических пар V класса,
PIV = 0 — количество кинематических пар IV класса.
Таким образом, степень подвижности рассматриваемого механизма
![]()
Механизму необходимо одно начальное звено для полной определенности его движения. В качестве начального принято звено 1, закон его движения - вращение с частотой n1 = const.
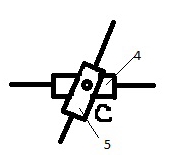
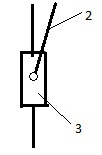
Структурно в состав механизма входят (рисунок 3):
а)
 б)
б)
 в)
в)
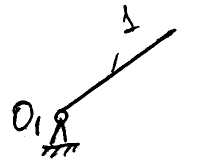
Рисунок 3 - Структурные элементы механизма
а) группа Асcура 2-го класса 2-го вида (рисунок3, а);
б) группа Асcура 2-го класса 1-го вида (рисунок 3, б);
в) механизм первого класса (рисунок 2, в).
Таким образом, формула строения механизма имеет вид:
I(1) II1 (2,3) II2 (4,5). (1.3.2)
Поскольку наивысший класс групп Ассура, входящих в состав механизма - второй, то и механизм в целом относится ко второму классу.
1.4 Кинематический анализ методом планов
Поскольку
одним из свойств групп Ассура является
их кинематическая определимость, то
кинематический  анализ
проводится последовательно по группам
Ассура, причем порядок их рассмотрения
совпадает с направлением стрелок в
формуле строения (1.3.2).
анализ
проводится последовательно по группам
Ассура, причем порядок их рассмотрения
совпадает с направлением стрелок в
формуле строения (1.3.2).
1.4.1 Построение плана скоростей
Механизм I класса (звено 1).
Угловая скорость кривошипа:
![]()
Вектор скорости точки А перпендикулярен звену 1 и направлен в соответствии с направлением ωι. Модуль скорости
![]()
На плане скоростей этот вектор изображается отрезком ра = 60мм. Тогда масштаб плана скоростей:
![]()
Группа АссураII1 (2,3)
Внешними точками группы являются точки А и О3, внутренней – точка В. Составляется система векторных уравнений, связывающих скорость внутренней точки со скоростями внешних точек:
![]() ;
;
![]()
По этой системе строится план скоростей, замеряются длины найденных отрезков (pb = мм, ab = мм) и определяются модули скоростей:
VB=(pb)·kV= 50·0,04 = 2 м/с;
VBА=(аb)·kV = 60·0,04= 2,4 м/c.
Скорость точек S2, C и S3 находятся с помощью теоремы подобия. Составляются пропорция, связывающая чертежные размеры звена 2 (АВ, AS2) c отрезками плана скоростей:
![]()
откуда определяется длина неизвестного отрезка
![]()
Этот
отрезок откладывается на отрезке ab
плана скоростей. Точка S2
является концом вектора
![]() ,
начала всех векторов – в полюсе р.
Поэтому отрезок ps2=
55 мм (определено замером) изображает
вектор
.
Модуль вектора
,
начала всех векторов – в полюсе р.
Поэтому отрезок ps2=
55 мм (определено замером) изображает
вектор
.
Модуль вектора
=(ps2)·kV =55·0,04 = 2,2 м/с.
Скорости точек S3 и С определяются аналогично по принадлежности звену 3.
Определяются величины угловых скоростей звеньев 2 и 3:
![]() ;
;
![]()
 Для
определения направления 2
отрезок ab плана скоростей устанавливается
в точку В, а точка А закрепляется
неподвижно; тогда становится очевидным,
что 2
направлена по часовой стрелке. Для
определения направления 3
отрезок рb плана скоростей устанавливается
в точку В, точка О3
неподвижна, поэтому 3
также направлена по часовой стрелке.
Для
определения направления 2
отрезок ab плана скоростей устанавливается
в точку В, а точка А закрепляется
неподвижно; тогда становится очевидным,
что 2
направлена по часовой стрелке. Для
определения направления 3
отрезок рb плана скоростей устанавливается
в точку В, точка О3
неподвижна, поэтому 3
также направлена по часовой стрелке.
Группа Ассура II2 (4,5)
Внешними точками группы являются точки С и D0 (точка D0 принадлежит стойке, внутренней – точка D, принадлежащая звеньям 4 и 5 (в дальнейшем обозначается без индексов).
По
принадлежности точки D звену 5 вектор
ее скорости известен по направлению:
![]() II
x-x. Поэтому для построения плана скоростей
для данной группы Ассура достаточно
одного векторного уравнения:
II
x-x. Поэтому для построения плана скоростей
для данной группы Ассура достаточно
одного векторного уравнения:
![]()
В результате построения плана скоростей определяются отрезки pd=110 мм, cd=37 мм. Модули скоростей:
VD=(pd)·kV=110·0,04 = 4,4 м/с;
VDC=(cd)·kV=37·0,04 = 1,48 м/с.
Скорость точки S4 определяется по принадлежности звену 4 аналогично определению скорости точки S2 по теореме подобия
Звено 5 совершает поступательное движение, поэтому скорости всех точек звена одинаковы и равны скорости точки D.
Величина угловой скорости звена 4 определяется аналогично предыдущему:

![]() .
.

Для определения направления 4 отрезок cd плана скоростей устанавливается в точку D, а точка С закрепляется неподвижно; тогда становится очевидным, что 4 направлена по часовой стрелке.
1.4.2 Построение плана ускорений Механизм I класса (звено 1).
Точка А кривошипа 1 совершает вращательное движение вокруг О, поэтому ее ускорение есть сумма нормального и тангенциального ускорений:
![]() ,
,
![]() =0,
т.к. n1 = 0;
=0,
т.к. n1 = 0;
Модуль ускорения.
aA = aA n =12·LOA = 29,32·0,1=85,849 м/c2.
На плане ускорений это вектор изображается отрезком a=171,698мм, направленным от А к О1. Масштаб плана ускорений:
![]() .
.
Группа Ассура II1 (2, 3)
Составляется система векторных уравнений, связывающих ускорение внутренней точки В с ускорениями внешних точек А и О3 на основании уравнений (2.4):
![]()
![]()
В этой системе модули нормальных ускорений
![]() ;
;
![]() .
.
На
плане ускорений векторы
![]() и
и
![]() изображается отрезками
изображается отрезками
![]() ;
;
![]() .
.
В результате построения плана ускорений определяются отрезки nBAb=135 мм, nВО3b=110 мм, b=115 мм и определяются модули ускорений:
аB=(b)·ka=115∙0,5 =57,5 м/с2;
аВA=(nBAb)·ka=135∙0,5=67,5 м/с2;
аВO3=(nBO3b)·ka=110∙0,5=55 м/с2.
Ускорение точки S2 определяются с помощью теоремы подобия, на основании которой составляется пропорция, связывающая чертежные длины звена 2 с отрезками плана скоростей:
откуда определяется длина неизвестного отрезка:
![]() .
.
Этот отрезок откладывается на отрезке ab плана ускорений. Соединением полюса с точкой S2 получается отрезок S2= 140 мм (определено замером). Модуль ускорений точки S2
aS2=(s2)·ka=140∙0,5 =70 м/с2.
Ускорения точек S3 и С определяются аналогично.
Определяются величины угловых ускорений звеньев 2 и 3:
 ;
; 
Для определения 2 отрезок nBAb плана ускорений устанавливается в точку В, а точка А закрепляется неподвижно. Для определения направления 3 отрезок nBО3b устанавливается в точку С.
Группа Ассура II2(4, 5).
По принадлежности точки D звену 5 вектор ее ускорения известен по направлению: II x-x. Поэтому для построения плана ускорений для данной группы достаточно одного векторного уравнения:
![]()
В этом уравнении модуль нормального ускорения
aDСn = 42·LCD = (2,96)2∙0,25=2,19 м/с2,
на плане это ускорение изображается отрезком
В результате построения плана ускорений определяются отрезки d = 82 мм и nDCd =91 мм и определяются модули ускорений:
aD = (d)·ka=82∙0,5=41 м/с2;
аDC= (nDCd)·ka=91∙0,5=45,5 м/с2.
Ускорение точки S2 находится по теореме подобия.
Величина углового ускорения звена 4:


Для определения направления 4 отрезок nDCd плана ускорений устанавливается в точку D, а точка С закрепляется неподвижно. Поскольку звено 5 совершает поступательное движение, то 5 = 0.
1.5 Силовой расчет
1.5.1 Определение инерционных факторов
Инерционные силовые факторы – силы инерции звеньев Риi и моменты сил инерции Миi определяются по выражениям:

![]()
![]() (1.5.1)
(1.5.1)
![]() (1.5.2)
(1.5.2)
Расчет инерционных силовых факторов сведен в таблице 1.4.
Таблица 1.4 - Определение инерционных силовых факторов механизма
Звено(i) |
1 |
2 |
3 |
4 |
5 |
Gi, H |
100 |
146 |
180 |
50 |
60 |
Isi, кгм2 |
0.05 |
3.89 |
7.29 |
0.16 |
0 |
аsi, м/с2 |
0 |
70 |
0 |
58.5 |
41 |
εi, 1/c2 |
0 |
92.47 |
137.5 |
182 |
0 |
Pиi, Н |
0 |
1022 |
0 |
292.5 |
246 |
Миi, Нм |
0 |
359.7 |
1002.4 |
29.12 |
0 |
Силовой расчет проводится в последовательности, противоположной направлению стрелок в формуле строения (1.3.1).