

РЕФЕРАТ
Курсовой проект: 14 страниц, 2 рисунка, 2 таблицы, 11 источников, 1 приложение.
Объект проектирования и исследования – механизмы конвейера: рычажный, зубчатый, кулачковий.
Цель работы – синтез и анализ этих механизмов.
При проектировании и исследовании механизмов использованы графические и аналитические методы с использованием ЭВМ.
РЫЧАЖНЫЙ МЕХАНИЗМ, СКОРОСТИ, УСКОРЕНИЯ, МОМЕНТ, МЕТОД БРУЕВИЧА, СПОСОБ ЖУКОВСКОГО, РЕДУКТОР, ЗУБЧАТАЯ ПЕРЕДАЧА, ЭВОЛЬВЕНТА, САТЕЛИТ, КУЛАЧОК.
СОДЕРЖАНИЕ
Введение 5
1 Структурный и кинематический анализ рычажного механизма 6
1.1 Структурный анализ механизма 6
1.2 Построение планов механизма, скоростей и ускорений 8
2 Проектирование кулачкового механизма 10
2.1 Подбор минимального радиуса центрового профиля кулачка 10
2.2 Построение профилей кулачка 11
Выводы 12
Перечень ссылок 13
Приложение А: Основные параметры предохранительного клапана 14
ВВЕДЕНИЕ
Целью курсового проекта является проектирование и исследование рычажного, зубчатого и кулачкового механизмов конвейера.
От двигателя с помощью зубчатого редуктора вращательное движение передается на главный вал, на котором закреплен кулачок и кривошип. От кривошипа звеньями рычажного механизма движение передается желобу, на котором находится какой-нибудь груз. При движении желоба вправо (рабочий ход) происходит перемещение груза, движение влево – холостой ход. Кулачковый механизм преобразует вращательное движение вала редуктора в возвратно-вращательное движение толкателя.
1 Структурный анализ рычажного механизма
1.1 Структурный анализ рычажного механизма
Данная кинематическая цепь замкнутая (т.к. все звенья входят не менее чем в две кинематические пары), плоская (т.к. каждое звено относительно всех остальных звеньев совершает плоское движение) и сложная, т.к. звенья 3 и 6 входят в три кинематические пары (табл.1.1).
Таблица 1.1 – Характеристика звеньев
№ звена |
Название звена |
Вид абсолютного движения звена |
1 |
кривошип |
вращательное |
2 |
шатун |
плоскопараллельное |
3 |
коромысло |
возвратно-вращательное |
4 |
ползун |
плоскопараллельное |
5 |
желоб |
поступательное |
6 |
стойка |
неподвижная |
Анализ кинематических пар:
1-6: низшая, плоская (относительное движение вращательное), одноподвижная;
1-2: низшая, плоская (относительное движение вращательное), одноподвижная;
2-3: низшая, плоская (относительное движение вращательное), одноподвижная;
3-4: низшая, плоская (относительное движение вращательное), одноподвижная;
3-6: низшая, плоская (относительное движение вращательное), одноподвижная;
4-5: низшая, плоская (относительное движение поступательное), одноподвижная;
5-6: низшая, плоская (относительное движение поступательное), одноподвижная.
От кривошипа звеньями 2, 3 и 4 рычажного механизма (рис.1.1) движение передается желобу 5, на котором находится какой-нибудь груз.
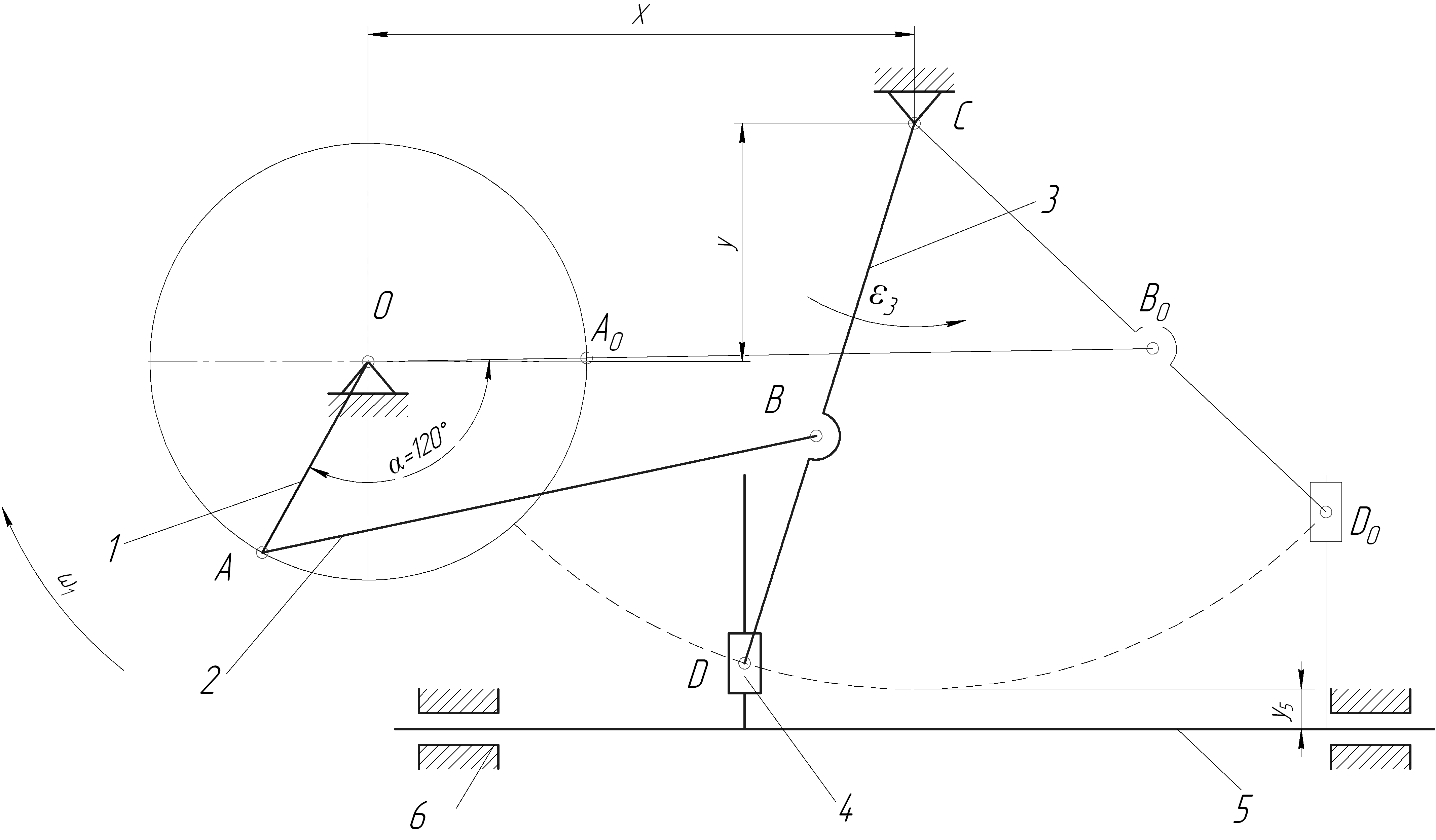
1 - кривошип; 2 - шатун; 3 - коромысло; 4 - ползун; 5 - желоб; 6 – стойка
Рисунок 1.1- Схема рычажного механизма
Так как данный механизм плоский для вычисления числа степеней свободы можно использовать формулу Чебышева [1]:
![]() ,
(1.1)
,
(1.1)
где
![]() – число степеней свободы механизма
;
– число степеней свободы механизма
;
![]() – количество
звеньев в механизме,
=6
об/мин ;
– количество
звеньев в механизме,
=6
об/мин ;
![]() – количество
одноподвижных пар,
– количество
одноподвижных пар,
![]() ;
;
![]() – количество
двухподвижных пар,
– количество
двухподвижных пар,
![]()
![]() .
.
От двигателя с помощью зубчатого редуктора вращательное движение передается на главный вал О, на котором закреплен кулачок и кривошип 1. От кривошипа звеньями 2, 3 и 4 рычажного механизма движение передается желобу 5, на котором находится какой-нибудь груз. При движении желоба вправо (рабочий ход) происходит перемещение груза, движение влево – холостой ход. Кулачковый механизм (рис.1.2) преобразует вращательное движение вала редуктора в возвратно-вращательное движение толкателя.
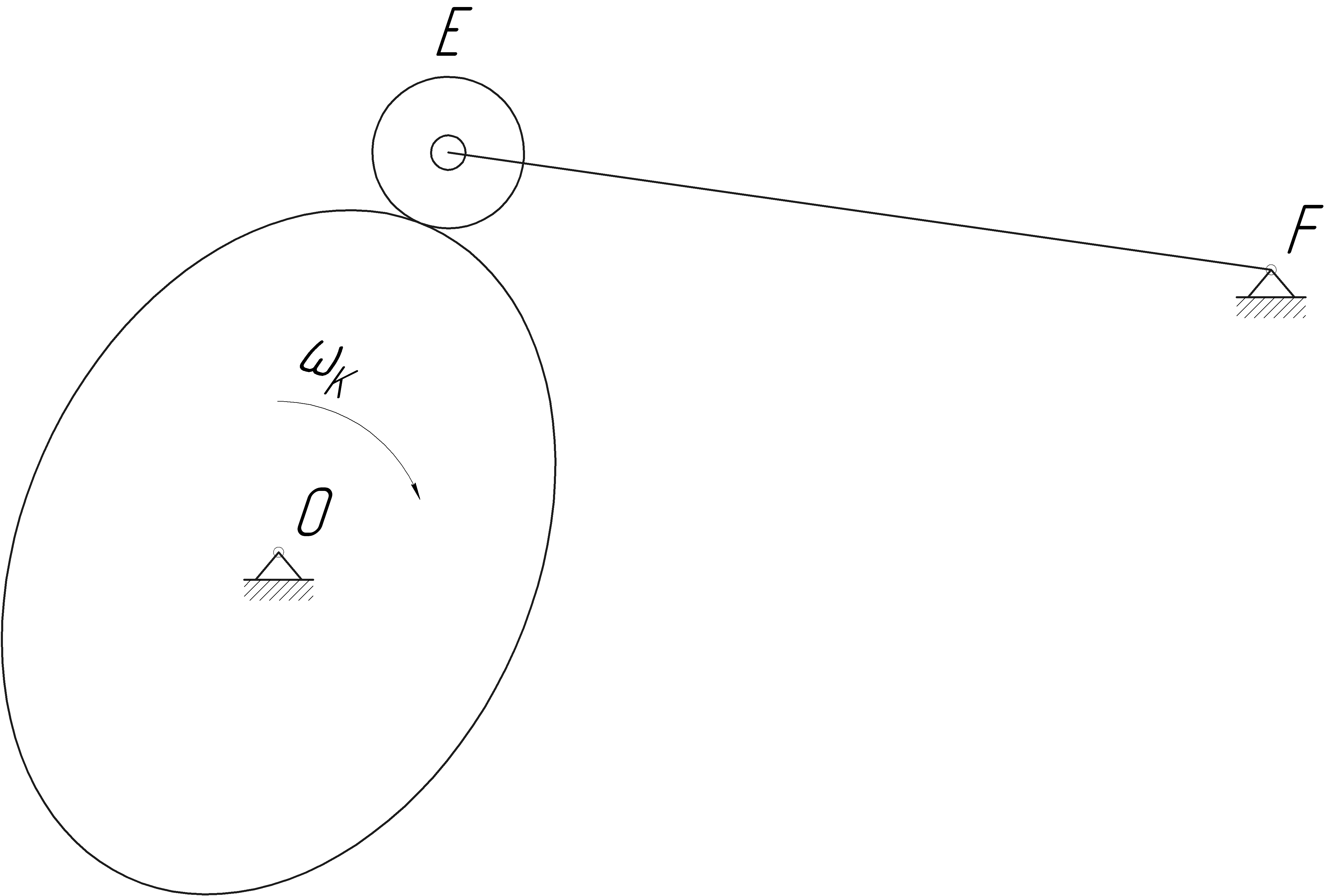
Рисунок 1.2 – Схема кулачкового механизма
1.2 Построение планов механизма, скоростей и ускорений
Строим план
скоростей. Для этого определяем угловую
скорость кривошипа 1:
![]()
(1.2)
![]()
Строим 2 положения
рычажного
механизма конвейера – нулевое и
заданное (![]() )
[1].
)
[1].
Скорость точки А:
![]() (1.3)
(1.3)
![]()
Определяем масштабный коэффициент:
![]()
![]()
![]()
Строим план ускорений в соответствии с данными и с учетом масштабного коэффициента, который равен 0,005 м/с в миллиметре чертежа.