

12. Уравнения линий и поверхностей. Полярная система координат. Прямая линия на плоскости. Различные виды уравнений. Взаимное расположение прямых.
Уравнения линий и поверхностей: Это такое равенство, которое можно рассматривать как запись определения линии или поверхности при помощи координат в рассматриваемой системе, например y=f(x)
Полярная система координат: Полярная система координат употребляется на плоскости и она определена, если задана точка О, называемая полюсом и исходящий из нее луч l, который мы назовем полярной осью. Положение точки фиксируется двумя числами: Радиусом r и углом φ между полярной осью и r.
Прямая линия на плоскости: Положение прямой на плоскости определяется параметрическими уравнениями линии на плоскости х=f(t) y=g(t) (1). Где t – параметр, имеющий физический смысл времени, что, однако, не является существенным. Уравнение линии есть лишь высказывание о координатах точек. То есть формулировка такова: существует такое число t , что выполняются равенства (1).
Различные
виды уравнений для прямой: 1)Направленный
вектор
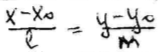 2)Две точки
2)Две точки
![]() 3)Прямая y=kx+b
4) L1=A1x+B1y+С1=0
3)Прямая y=kx+b
4) L1=A1x+B1y+С1=0
Взаимное расположение прямых: Две прямые задаются уравнениями: L1=A1x+B1y+С1=0 и L2=A2x+B2y+С2=0. Две прямые совпадают, когда A1\ A2= B1\ B2= С1\ С2, параллельны когда A1\ A2= B1\ B2 и не равно С1\ С2, перпендикулярны cosα=0 и A1 A2+ B1 B2=0. Две прямые называются скрещивающимися, если они не лежат в одной плоскости.
13. Уравнения плоскостей и прямых в пространстве.
Поверхности
и линии первого порядка: Ax+By+Cz+D=0
Уравнение первой степени или линейное
уравнение, связывающее координаты точки
в пространстве. Теорема1:В общей декартовой
системе координат в пространстве каждая
плоскость может быть задана линейным
уравнением. Теорема2:В общей декартовой
системе координат на плоскости каждая
прямая линия может быть задана линейным
уравнением. Векторное параметрическое
уравнение: r-r0=ta
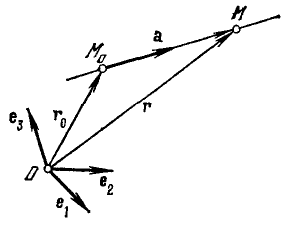
Параметрические уравнения плоскости: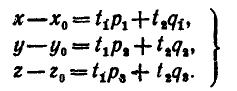
Параметрические
уравнения прямой на плоскости и в
пространстве:

Векторное
параметрическое уравнение плоскости:
![]()
Векторное
уравнение плоскости:
![]()
14. Линии второго порядка. Эллипс. Гипербола. Канонические уравнение. Фокальные расстояния. Эксцентриситеты.
Линии
второго порядка: Уравнение
линии второго порядка Ax2+2Bxy+Cy2+2Dx+2Ey+F=0.
Линия, которая в некоторой декартовой
прямоугольной системе координат может
быть задана уравнением
 называется эллипсом, а уравнение
каноническим.
называется эллипсом, а уравнение
каноническим.
 - мнимый эллипс.
- мнимый эллипс.
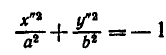
![]() - две мнимые пересекающиеся прямые.
- две мнимые пересекающиеся прямые.
![]() - гипербола и её канонической уравнение.
- гипербола и её канонической уравнение.
![]() - парабола.
- парабола.
![]() - пара параллельных прямых.
- пара параллельных прямых.![]() - пара мнимых параллельных прямых.
- пара мнимых параллельных прямых.
Эллипс: Линия, которая в некоторой декартовой прямоугольной системе координат может быть задана уравнением называется эллипсом, а уравнение каноническим.
 Оси
координат канонической системы – оси
симметрии эллипса, а центр – центр
симметрии. С2=a2-b2,
Два фокуса F1(c,0)
и F2(-c,o).
Экцентриситет e=c\a.
Расстояние от произвольной точки M(x,y),
лежащей на эллипсе до каждого из фокусов
является линейной функцией от ее абциссы
х :
Оси
координат канонической системы – оси
симметрии эллипса, а центр – центр
симметрии. С2=a2-b2,
Два фокуса F1(c,0)
и F2(-c,o).
Экцентриситет e=c\a.
Расстояние от произвольной точки M(x,y),
лежащей на эллипсе до каждого из фокусов
является линейной функцией от ее абциссы
х : Для того чтобы точка лежала на эллипсе,
необходимо и достаточно, чтобы сумма
ее расстояний до фокусов равнялось
большой оси эллипса 2а.
Для того чтобы точка лежала на эллипсе,
необходимо и достаточно, чтобы сумма
ее расстояний до фокусов равнялось
большой оси эллипса 2а.
Гипербола: Линия, которая в некоторой декартовой прямоугольной системе координат может быть задана уравнением называется эллипсом, а уравнение каноническим.
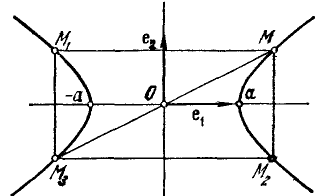 Оси координат канонической системы –
оси симметрии гиперболы, а центр – центр
симметрии. Прямые с уравнениями y=bx\a
и y=-bx\a
в канонической системе координат
называются асимптотами гиперболы.
Экцентриситет e=c\a.
C2=a2+b2
Два фокуса F1(c,0)
и F2(-c,o).
Для того чтобы точка лежала на гиперболе,
необходимо и достаточно, чтобы разность
ее расстояний до фокусов по абсолютной
величине равнялась вещественной оси
гиперболы. Касательная к гиперболе есть
биссектриса угла между отрезками,
соединяющими эту точку с фокусами.
Оси координат канонической системы –
оси симметрии гиперболы, а центр – центр
симметрии. Прямые с уравнениями y=bx\a
и y=-bx\a
в канонической системе координат
называются асимптотами гиперболы.
Экцентриситет e=c\a.
C2=a2+b2
Два фокуса F1(c,0)
и F2(-c,o).
Для того чтобы точка лежала на гиперболе,
необходимо и достаточно, чтобы разность
ее расстояний до фокусов по абсолютной
величине равнялась вещественной оси
гиперболы. Касательная к гиперболе есть
биссектриса угла между отрезками,
соединяющими эту точку с фокусами.