

 Міністерство
транспорту та зв’язку України
Міністерство
транспорту та зв’язку України
Українська державна академія залізничного транспорту
Кафедра МПМ
Дослідження та проектування механізмів кривошипно-повзунного преса
Пояснювальна записка та розрахунки
до курсового проекту з теорії механізмів і машин
КПМ.ТММ.03.546.01.ПЗ
Керівник проекту
Ас. В.С. Тіщенко
Розробив
В.В. Кириченко
ст. гр. 3-ІІ-Лс
2010
 Зміст
Зміст
Вступ 3
1 Дослідження механізмів кривошипно-повзунного пресу 4
Вихідні дані 5
Структурний аналіз механізму 5
Кінематичний аналіз механізму 5
Силовий розрахунок 10
Проектування прямозубої циліндричної передачі 14
Синтез кулачкового механізму 21
Список літератури 24
 Вступ
Вступ
Курсовий проект є комплексним і включає розділи з дослідження важільних механізмів та проектування механізмів з вищими кінематичними парами.
Теорія машин і механізмів – це наука, що вивчає загальні методи структурного та динамічного аналізу і синтезу різних механізмів, механіку машин. Важливо підкреслити, що викладені в теорії машин і механізмів методи придатні для проектування будь-якого механізму і не залежить від його механічного призначення, а також фізичної природи робочого процесу машини.
Дисципліна Теорія механізмів і машин дозволяє визначення функціональних можливостей механізмів, шляхом проведення структурного і кінематичного аналізу, а також включає проектування механізмів з вищими кінематичними парами.
А також дисципліна розробляє основи динамічного удосконалення механізмів і машин.
В курсовому проекті реалізуються сучасні компютерно-активізовані технології навчання, які передбачають багатопланове застосування ЕОМ на всіх етапах курсового проектування.
В курсовому проекті виконується розробка кривошипно-повзунного механізму повітряного компресора, прямозубої циліндричної зубчатої передачі та синтез кулачкового механізму
1 Дослідження та проектування механызмыв кривошипно-повзунного преса
Проектована установка являє собою одноступеневий поршневий компресор простої дії, який приводиться в дію від електродвигуна зубчастим редуктором.
Основним механізмом компресора є кривошипно-повзунний механізм (далі КПМ), який складається з кривошипа 1, шатуна 2, поршня 3 і блока 4 (рисунок 1).
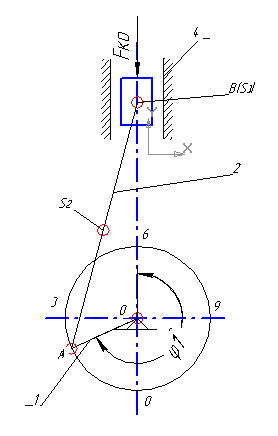
Рис.1 – План КПМ одноступеневого повітряного компресора
 Принцип
роботи такий: коли поршень 3 рухається
вниз, в циліндрі компресора створюється
розрядження, внаслідок чого відкривається
втягуючий клапан і відбувається забір
повітря з атмосфери.
Принцип
роботи такий: коли поршень 3 рухається
вниз, в циліндрі компресора створюється
розрядження, внаслідок чого відкривається
втягуючий клапан і відбувається забір
повітря з атмосфери.
Рух поршня у зворотному напрямку стискує повітря в циліндрі. При цьому втягуючий клапан закривається і при досягненні заданого тиску відкривається нагнітаючий клапан і стиснуте повітря потрапляє в повітряний забірник. Робочий цикл компресора здійснюється за один оберт кривошипа.
 Вихідні
дані
Вихідні
дані
До основних розділів дослідження важільних механізмів відносяться: структурний аналіз,кінематичний аналіз та силовий розрахунок.
Початкові дані:
Частота обертання початкової ланки, n1=54 хв-1
Довжина початкової ланки (радіус кривошипа), lOA=0,168 м
Співвідношення довжин ланок, lАВ/lОА=3,8
Вага шатуна, G2=560 Н
Вага поршня, G3=720 Н
Положення центра ваги шатуна, lАS2/lАВ=0.5
Максимальна тиск у циліндрі, Рмах=12000 МПа
Координата
розрахункового положення механізму,![]() =60˚
=60˚
Структурний аналіз
Головним завданням структурного аналізу механізмів є визначення числа його рухомих ланок,числа і класу кінематичних пар,ступеня рухомості механізму,виявлення кількості класу структурних груп,нашарування яких цей механізм утворений,а також визначення класу і порядку механізму.
Структурний аналіз передує і дозволяє встановити послідовність кінематичного та силового дослідження механізму.
Як приклад розглянемо структурний аналіз кривошипно-шатунного механізму ( рисунок 1 ). До складу механізму входять 3 рухомі ланки:1-кривошип ОА;2-шатун АВ;3-повзун;одна не рухома ланка 4-стояк та 4 кінематичні пари 4-1;1-2;2-3;3-4. Всі кінематичні пари належать до5-го класу. Ступінь рухомості механізму визначається за формулою Чебишева.
W=3n-2p5-p4 (1)
Для досліджуваного механізму число рухомих ланок n=3;число кінематичних пар 5-го класу p5=4; число кінеатичних пар 4-го класу p4 =0
W=3*3-2*4-0=1
Досліджуваний механізмутворний шляхом нашарування до механізму 1-го
класу ( стояк-кривошип ОА) структурної групи ( шатун 2-повзун 3 ) другого
класу, другого порядку, другого виду. Тому механізм, що розглядається, є
механізмом 2-го класу 2-го порядку.
1.3 Кінематичний аналіз
Метою кінематичного дослідження є побудова планів і траєкторій, що описують точки ланок, а також визначення швидкостей та прискорень точок і ланок механізму.
Для визначення швидкостей та прискорень використовуємо графоаналітичний метод або метод планів.
Визначаємо швидкість точки А кривошипа
VA=lOA![]()
![]() (2)
(2)
VA=0,168 5,65=0,9495 м/c,
де кутова швидкість кривошипа
![]() дорівнює
дорівнює
=![]() n1
(3)
n1
(3)
=(3,14 54)/30=5,652 рад/с
Від
полюса плану швидкостей PV
відкладаємо вектор
![]()
![]() ,
перпендикулярний до кривошипа в
даному положенні і направлений в сторону
його обертання. Масштаб
плану швидкостей:
,
перпендикулярний до кривошипа в
даному положенні і направлений в сторону
його обертання. Масштаб
плану швидкостей:
![]() V=VA/PV
a
(4)
V=VA/PV
a
(4)
V=0,9495/80=0,0119 м c/мм
 Вектор
приймаємо 80 мм
Вектор
приймаємо 80 мм
Далі переходимо до структурної групи 2-3. Для визначення швидкості точки B скористаємось векторними рівняннями
![]()
Для визначення дійсних значень швидкостей необхідно довжини відповідних векторів у міліметрах, взятих з плану швидкостей, помножити на масштаб V.
VB=![]() V
(5)
V
(5)
VBA=![]() V
(6)
V
(6)
VS2=![]() V
(7)
V
(7)
Визначаємо кутову швидкість шатуна
![]() 2=VBA/LBA
(8)
2=VBA/LBA
(8)
Напрямок 2 визначаємо шляхом переносу вектора ВА відносної швидкості VBA у точку В і розглядаючи рух точки В відносно А у напрямку VBA .
Отримані результати розрахунку швидкостей шатуна зведено в таблиці 1.1
Визначення лінійних прискорень виконуємо у тій же послідовності, що і визначення лінійних швидкостей. Прискорення точки А кривошипа ОА , що здійснює рівномірний обертальний рух , включає тільки нормальну складову
аА=
![]() lOA
(9)
lOA
(9)
Прискорення аА зобразимо вектором PBA, де PA –полюс плану прискорень. Вектор PAa направлений по ланці ОА до центра обертання, тобто до точки О. Масштаб плану прискорень
а
=
аА/![]() (10)
(10)
а=5,36/80≈0,067(м/c2)/мм
Вектор
РА
а приймаємо 80
мм.
 Для
визначення прискорення точки В
складаємо векторні рівняння
Для
визначення прискорення точки В
складаємо векторні рівняння
![]() ;
аВ=а3-4
;
аВ=а3-4
Таблиця 1.1 – Швидкості руху шатуна
-
№
,˚
S2, мм
VS2, м/с
VB, м/с
VBA, м/с
2 ,с-1
0
0
2,7
0,48
0,95
0
0
1
30
4,482
0,58
0,34
0,83
1,3
2
60
3,834
0,8
0,71
0,47
0,74
3
90
2,754
0,48
0,95
0
0
4
120
2,808
0,89
0,91
0,49
0,77
5
150
5,238
0,66
0,56
0,8
1,25
6
180
2,7
0,48
0,95
0
0
7
210
5,238
0,66
0,56
0,8
1,25
8
240
2,808
0,89
0,91
0,49
0,77
9
270
2,754
0,48
0,95
0
0
10
300
3,834
0,8
0,71
0,47
0,74
11
330
4,482
0,58
0,34
0,83
1,3
12
360
2,7
0,48
0,95
0
0
Нормальна складова прискорення
а![]() =
=![]() lAB
(11)
lAB
(11)
а =5,652 0,168=5,36 м/c2
Вектор
![]() направлений
уздовж ланки АВ
від точки В до
А. Вектор
направлений
уздовж ланки АВ
від точки В до
А. Вектор
![]() направлений
перпендикулярно ланці АВ,
а
направлений
перпендикулярно ланці АВ,
а
![]() -
вертикально (за напрямком руху повзуна).
Для
розв’язання
векторних
рівнянь (визначення модулів векторів
та
)
з точки РА
плану прискорень
паралельно АВ
у напрямку від точки В
до точки А
відкладаємо вектор
-
вертикально (за напрямком руху повзуна).
Для
розв’язання
векторних
рівнянь (визначення модулів векторів
та
)
з точки РА
плану прискорень
паралельно АВ
у напрямку від точки В
до точки А
відкладаємо вектор
![]() ,що
зображає прискорення
.
Довжина цього
вектора
,що
зображає прискорення
.
Довжина цього
вектора
=
![]() /
а
(12)
/
а
(12)
Через точку п2 проводимо пряму перпендикулярно АВ (напрямок вектора ), а через полюс плану прискорень проводимо вертикальну пряму. Ці прямі перетнуться у точці b. Зєднаємо на плані прискорень точки а і b.
Дійсні
значення прискорень визначаються як
добуток довжин відповідних векторів,
взятих з плану прискорень,
на масштаб плану прискорень. Для
робочого положення (![]() 1=120°)
отримуємо наступні значення:
1=120°)
отримуємо наступні значення:
аВ=![]() а
(13)
а
(13)
аS2=![]() а
(14)
а
(14)
а![]() =
=![]() а
(15)
а
(15)
Визначаємо кутове прискорення шатуна.
Е2=а /lAB (16)
Напрямок Е2
визначаємо шляхом переносу вектора а2b
прискорення
а
у точку В ланки 2.
Розрахунки лінійних прискорень руху наведені в таблиці 1.2
Таблиця 1.2 – Прискорення шатуна
№ |
,˚ |
, м/с2 |
an ,м/с2 |
аВ, мм |
а ,м/с2 |
Е2 ,с-2 |
0 |
0 |
0 |
0 |
2,7 |
0 |
0 |
1 |
30 |
1,08 |
20 |
3,834 |
2,754 |
16,39 |
2 |
60 |
0,35 |
6,5 |
3,294 |
4,698 |
27,964 |
3 |
90 |
0 |
0 |
2,7 |
0 |
0 |
4 |
120 |
0,38 |
7 |
1,998 |
4,698 |
27,964 |
5 |
150 |
1 |
18,5 |
5,4 |
2,538 |
15,107 |
6 |
180 |
0 |
0 |
2,7 |
0 |
0 |
7 |
210 |
1 |
18,5 |
5,4 |
2,538 |
15,107 |
8 |
240 |
0,38 |
7 |
1,998 |
4,698 |
27,964 |
9 |
270 |
0 |
0 |
2,7 |
0 |
0 |
10 |
300 |
0,35 |
6,5 |
3,294 |
4,698 |
27,964 |
11 |
330 |
1,08 |
20 |
3,834 |
2,754 |
16,39 |
12 |
360 |
0 |
0 |
2,7 |
0 |
0 |