

ЭКЗ / tmm_chapter7
.pdf
|
|
|
|
режим оттормаживания |
|
|
|
|
N 1 |
P 0 |
N |
P |
решения не существует |
|
|
|
0 |
|
|
|
C2 cos S2 f sin |
режим самоторможения |
||
|
инверсный тяговый режим. |
|||
|
|
N 1 |
|
|
Определив реакции в высшей кинематической паре (силы N12 и F12), можно перейти к силовому расчету кулачка. Составляя уравнения кинетостатики в системе осей 01х1y1 и используя соотношение (5.14), получаем (полагая, что q 0, а центр кулачка совпадает с точкой 01):
R01x N12 sin f1 | N12 |
| cos 0, |
|
|
|
|
|
|
||
R01y N12 cos f1 | N12 |
| sin 0, |
|
|
|
|
|
(5.35) |
||
Q N |
e(cos f sin ) N |
s(sin f |
cos ) |
|
f |
R2 |
R2 |
0. |
|
|
|
||||||||
12 |
1 |
12 |
1 |
1 |
f 2 |
01x |
01y |
|
|
|
|
|
|
|
|
|
|||
где е – эксцентриситет кулачкового механизма, s – координата толкателя,
f – коэффициент трения во вращательной паре, ρ – радиус цапфы вала кулачка.
Из уравнений (5.35) можно определить реакции во вращательной паре и движущий момент Q.
Силовой расчет червячной передачи.
|
|
|
a) |
б) |
|
|
F′ |
F |
|
N |
z, z* |
|
|
N′ |
|
B |
z** |
|
|
|
|
B′ |
|
F |
|
y** |
|
|
|
|
N |
|||
|
|
|
|
|
|
|
|
|
|
|
|
α |
* |
|
|
|
|
|
|
y |
|
|
γ |
α |
B |
|
y |
|
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x*, x** |
|
|
|
|
|
|
x |
|
|
Рис. 5.6
152
Угол α – угол профиля исходного контура (при α=0 виток червяка становится прямобочным).
Угол γ – угол подъема винтовой линии червяка (при γ = 0 винтовая линия обращается в кольцевую).
S = Nּcosαּcosγ – Fּsinγ =N(cosαּcosγ – f ּsignNּsinγּsign q ),
P = Nּcosαּsinγ + Fּcosγ =N(cosαּsinγ + fּsignNּcosγּsign q ), (5.16) T = Nּsinα.
z, z* |
|
|
|
|
N y** |
|
z** |
|
P |
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
T F |
|
α |
|
|
|
y* |
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|
|
|
B |
|
|
S |
|
y |
|
|
|
|
||||
γ |
|
|
|
|||
|
|
|
|
|
||
x*, x** |
|
|
|
|
|
|
x |
Рис. 5.7 |
|
|
|
|
|
|
|
|
|
|
||
Червячная передача содержит одну высшую пятиподвижную кинематическую пару, динамическая модель которой представляется уравнениями
(5.16), и две вра-
щательные пары. Пренебрежем трением во вращательных парах.
Уравнения кинетостатики для червячного колеса и червяка оказы-
S – осевая сила на червяке (окружная сила на червячном колесе);
P – окружная сила на червяке (осевая на червячном колесе);
Т – радиальная сила.
153

ваются независимыми.
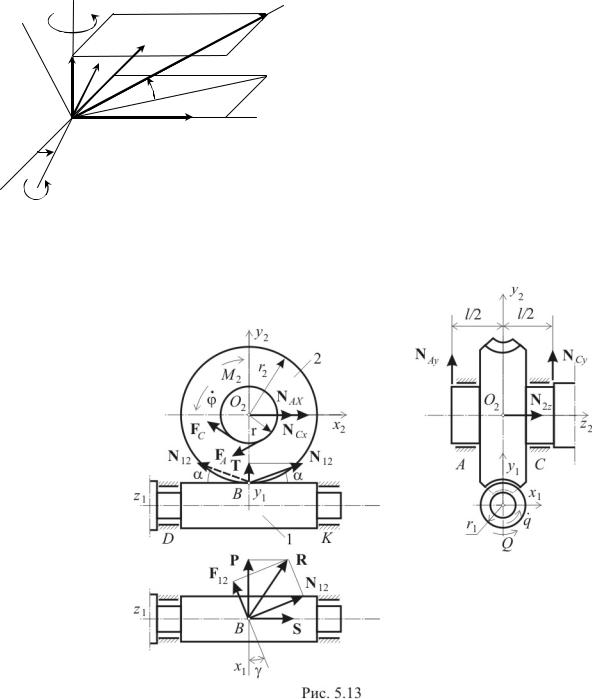
Сначала составим уравнения кинетостатики для червячного колеса. Обозначим: r2 – начальный радиус червячного колеса,
J20 – момент инерции колеса относительно оси О2z
Получаем систему шести уравнений с шестью неизвестными (NAx, NAy,
NCx, NCy, N2z, N12):
NAx NCx N12 (cos cos f sign N12 sin sign ) 0, |
|
|
|
||
|
|
|
|
|
|
NAy NCy N12 sin 0, |
|
|
|
|
|
N2 z N12 |
(cos sin f sign N12 cos sign ) 0, |
|
|
|
|
|
|
|
|
|
(5.36) |
|
|
f sign N12 cos sign |
|
0, |
|
NCy NAy 0,5 N12 (cos sin |
)r2 |
|
|||
NCx NAx 0,5 0,
J20 M2 N12 (cos cos f sign N12 sin sign )r2 0.
Пусть направление угловой скорости совпадает с показанным на рисунке: > 0 (sign
= +1). Из последнего уравнения (5.36) определим
N12:
|
|
M2 |
J20 |
|
|
|
N12 |
|
|
|
. |
(5.37) |
|
(cos cos f sin sign N12 )r2 |
||||||
|
|
|
|
|||
Формулу (5.37) иногда записывают в другом виде. Обозначив tg ч f  cos , где ψч – угол
cos , где ψч – угол
трения в червячной передаче, получим:
N |
|
|
, |
(M2 J20 )cos ч |
|||
12 |
r2 cos cos( ч) |
|
|
|
|
|
|
где знак «+» или «–» в знаменателе устанавливается в зависимости от режима движения червячной передачи.
Для пояснения приведен пример с червячной лебедкой (рис. 5. 14). В ней движущий момент Q прикладывается к червяку 1, а к червячному колесу 2 присоединен барабан с намотанным на него тросом, на котором подвешен груз. Груз с тросом создает на барабане момент М2.
Обозначим N signN12
154

|
|
|
|
«малое» трение: |
|
|
«большое» трение: |
|
||||||
|
|
|
cos cos f sin |
|
|
cos cos f sin |
|
|||||||
M 2 |
J20 0 |
|
|
|
|
M 2 |
J20 |
|
|
решения не существует |
|
|||
|
|
N12 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
cos cos f sin r |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
режим самоторможения |
|||
|
|
|
тяговый режим N 1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||
M 2 |
J20 0 |
|
|
|
|
M 2 |
J20 |
|
|
|
два решения |
|
||
|
|
N12 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
cos cos f sin r |
|
|
M 2 |
J20 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
2 |
|
|
N12 cos cos f sin r |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
инверсный тяговый режим. |
|
|
2 |
|
||||||||
|
|
|
|
|
|
N |
1 |
|
|
|
M 2 J20 |
|
||
|
|
|
|
|
|
|
|
|
|
N12 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
cos cos f sin r |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
режим оттормаживания |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
N 1 |
|
|
Для инверсной передачи Q является моментом сопротивления, а М2 движущий момент. Для определения реакций необходимо записать уравнения кинетостатики червяка (последняя структурная группа). Ограничимся записью уравнения моментов:
|
|
J |
10 |
q Q N |
12 |
cos sin |
N f cos r 0 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
Q J10q |
|
|||||
|
|
|
|
|
|
|
N12 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
cos sin N f cos r |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
«большое» трение: |
|
|||||||||
|
|
|
«малое» трение: |
|
|
|
|||||||||||
|
|
cos sin f cos |
|
|
cos sin f cos |
|
|||||||||||
Q J10q 0 |
|
|
|
|
|
|
|
Q J10q |
|
|
решения не существует |
|
|||||
|
N12 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||
|
cos sin f cos r |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
режим самоторможения |
|||
|
|
тяговый режим N 1 |
|
|
|||||||||||||
|
|
|
|
|
|
два решения |
|
||||||||||
Q J10q 0 |
|
|
|
|
|
|
|
Q J10q |
|
|
|
|
|
||||
|
N12 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
cos sin |
f cos r |
|
|
|
Q J10q |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
N12 cos sin f cos r |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
инверсный тяговый режим. |
1 |
|
||||||||||||||
|
|
|
|
|
|
|
N |
1 |
|
|
|
|
|
|
Q J10q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N12 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos sin f cos r |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
режим оттормаживания |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 1 |
|
155