

35.Разбег с учетом статической характеристики двигателя
Изучение
переходных процессов начнем с рассмотрения
неуправляемого разбега
машины. Предположим сначала, что может
быть принята статическая характеристика
двигателя. Поскольку разбег является
неуправляемым, то
![]() .
Предположим также, что приведенный
момент инерции является постоянным, а
приведенный момент сил сопротивления
явно зависит от координаты
.
Предположим также, что приведенный
момент инерции является постоянным, а
приведенный момент сил сопротивления
явно зависит от координаты
![]() ; тогда уравнение движения (8.17) принимает
следующий вид:
; тогда уравнение движения (8.17) принимает
следующий вид:
![]() . (8.56)
. (8.56)
Пренебрежение
переменными компонентами
![]() и
и
![]() обычно оказывается допустимым при
исследовании переходных процессов.
обычно оказывается допустимым при
исследовании переходных процессов.
Разбегу
машины соответствует решение уравнения
(8.56) при начальных условиях
![]() ,
,
![]() .
Обозначив
.
Обозначив
![]() ,
получим дифференциальное уравнение с
разделяющимися переменными
,
получим дифференциальное уравнение с
разделяющимися переменными
![]() . (8.57)
. (8.57)
Решая его, находим
 . (8.58)
. (8.58)
Обращением
функции (8.58) получим зависимость
![]() .
Время разбега можно определить как
.
Время разбега можно определить как
 . (8.59)
. (8.59)
Однако
легко показать, что интеграл этот
расходится. Действительно, при
![]() знаменатель дроби, стоящей под интегралом,
обращается в нуль ( поскольку
знаменатель дроби, стоящей под интегралом,
обращается в нуль ( поскольку
![]() – угловая скорость в установившемся
движении, определяемая из уравнения
(8.26)); поэтому интеграл является
несобственным; он расходится, если
– угловая скорость в установившемся
движении, определяемая из уравнения
(8.26)); поэтому интеграл является
несобственным; он расходится, если
![]() , (8.60)
, (8.60)
что
является условием устойчивости режима
установившегося движения. Таким образом,
теоретически время разбега бесконечно
велико; поэтому условно за время разбега
обычно принимается время достижения
угловой скорости, близкой к
![]() ,
но меньшей ее. Чаще всего принимают, что
,
но меньшей ее. Чаще всего принимают, что
 . (8.61)
. (8.61)
Из
этой формулы видно, что время разбега
пропорционально
![]() ;
поэтому уменьшение момента инерции
машины является одним из эффективных
способов снижения времени переходного
процесса.
;
поэтому уменьшение момента инерции
машины является одним из эффективных
способов снижения времени переходного
процесса.
Разбег при линейных характеристиках машины и двигателя
Пусть
![]() ,
,
![]() , (8.62)
, (8.62)
где
![]() .
Подставив (8.62) в (8.56), получим
.
Подставив (8.62) в (8.56), получим
![]() .
.
Поделив
оба слагаемых на
![]() и учитывая, что
и учитывая, что
![]() ,
имеем
,
имеем
![]() . (8.63)
. (8.63)
Общее решение этого уравнения записывается в виде
![]() .
.
Из
начального условия
![]() находим, что
находим, что
![]() ;
отсюда
;
отсюда
 . (8.64)
. (8.64)
Полагая,
что
![]() ,
,
![]() ,
получаем
,
получаем
![]() .
.
Таким
образом, время разбега пропорционально
величине
![]() .
.
Определение
момента в передаточном механизме.
Найдем момент
![]() ,
возникающий при разбеге в передаточном
механизме. Составляя уравнение движения
ротора двигателя, имеем
,
возникающий при разбеге в передаточном
механизме. Составляя уравнение движения
ротора двигателя, имеем
![]() ,
,
где
![]() – момент инерции ротора; поскольку
– момент инерции ротора; поскольку
![]() ,
,
![]() ,
,
![]() ,
,
получаем
 , (8.65)
, (8.65)
где
![]() .
.
Н а
рис.8.8 построены возможные формы
зависимости
а
рис.8.8 построены возможные формы
зависимости
![]() при разбеге. Очевидно, что при
при разбеге. Очевидно, что при
![]() момент в передаточном механизме,
возникающий в процессе разбега, превышает
момент в установившемся режиме. Более
предпочтительным является условие
момент в передаточном механизме,
возникающий в процессе разбега, превышает
момент в установившемся режиме. Более
предпочтительным является условие
![]() ,
при котором
,
при котором
![]() не превосходит
не превосходит
![]() в течение всего переходного процесса.
в течение всего переходного процесса.
36Разбег с учетом динамической характеристики двигателя
Ограничимся рассмотрением системы с линейными характеристиками
![]()
![]()
(8.62), запишем уравнения движения машины в форме
 (8.66)
(8.66)
Определим
движущий момент
![]() из первого уравнения
из первого уравнения
![]() .
.
Подставим это выражение во второе уравнение, получим
![]()
или, после упрощений,
![]() .
.
В
дальнейшем будем предполагать, что
![]() ,
и соответствующее слагаемое в коэффициенте
при
,
и соответствующее слагаемое в коэффициенте
при
![]() может быть отброшено.
может быть отброшено.
Окончательно получаем
![]() . (8.67)
. (8.67)
Разбег описывается частным решением уравнения (8.67), соответствующим определенным начальным условиям. Одно из этих условий очевидно:
![]() ,
,
![]() .
(8.68)
.
(8.68)
В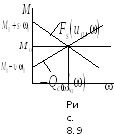 торое
начальное условие требует более подробных
объяснений. Дело в том, что в момент
включения двигателя движущий момент
равен нулю, а момент сопротивления
торое
начальное условие требует более подробных
объяснений. Дело в том, что в момент
включения двигателя движущий момент
равен нулю, а момент сопротивления
![]() (рис. 8.9). Поэтому в этот момент времени
разбег начаться не может. При неподвижном
роторе начнется возрастание момента в
соответствие с динамической характеристикой
двигателя, в которой следует положить
(рис. 8.9). Поэтому в этот момент времени
разбег начаться не может. При неподвижном
роторе начнется возрастание момента в
соответствие с динамической характеристикой
двигателя, в которой следует положить
![]() :
:
![]() .
(8.69)
.
(8.69)
Разбег
начнется в тот момент, когда частное
решение уравнения (8.69), соответствующее
условию
![]() ,
достигнет величины, равной
,
достигнет величины, равной
![]() .
Если отсчитывать время разбега от этого
момента, то в качестве второго начального
условия следует принять
.
Если отсчитывать время разбега от этого
момента, то в качестве второго начального
условия следует принять
![]() ,
,
![]() . (8.70)
. (8.70)
Разыскивая общее решение линейного неоднородного дифференциального уравнения (8.67), найдем сначала корни его характеристического уравнения
![]() .
.
Решая это уравнение, находим
![]() . (8.71)
. (8.71)
Далее необходимо рассмотреть два случая.
а).
Если
![]() ,
то корни (8.71) являются вещественными и
отрицательными. Решение уравнения
(8.67) представляется в форме
,
то корни (8.71) являются вещественными и
отрицательными. Решение уравнения
(8.67) представляется в форме
![]() .
.
Начальные
условия (8.68) и (8.70) позволяют определить
постоянные
![]() и
и
![]() :
:
![]() ,
,
![]() .
.
Разбег в этом случае является апериодическим процессом, при котором
![]() . (8.72)
. (8.72)
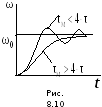
Примерная
форма графика функции
![]() показана на рис. 8.10. Угловая скорость
показана на рис. 8.10. Угловая скорость
![]() монотонно возрастает, стремясь к
монотонно возрастает, стремясь к
![]() .
Можно показать, что при всех
.
Можно показать, что при всех
![]() в этом случае
в этом случае
![]() .
.
б).
Если
![]() ,
то корни (8.71) являются комплексными
сопряженными:
,
то корни (8.71) являются комплексными
сопряженными:
![]() . (8.73)
. (8.73)
Используя начальные условия, находим
![]() .
(8.74)
.
(8.74)
Разбег в этом случае оказывается затухающим колебательным процессом (рис. 8.10). Максимальное значение угловой скорости

достигается
при
![]() .
В этом случае угловая скорость в процессе
разбега достигает значений, превосходящих
.
В этом случае угловая скорость в процессе
разбега достигает значений, превосходящих
![]() ,
что часто является нежелательным.
,
что часто является нежелательным.
Торможение машины
Рассмотрим
процесс торможения машины, при котором
двигатель выключается и включается
тормоз, создающий дополнительный момент
сопротивления
![]() ,
который будем считать постоянным по
величине. В этом случае уравнение
движения жесткой машины записывается
в виде
,
который будем считать постоянным по
величине. В этом случае уравнение
движения жесткой машины записывается
в виде
![]() . (8.75)
. (8.75)
При
линейной характеристике
![]() это уравнение принимает форму
это уравнение принимает форму
![]() или
или
![]() , (8.76)
, (8.76)
где
![]() – постоянная
времени при торможении.
Решая уравнение (8.76) при начальном
условии
– постоянная
времени при торможении.
Решая уравнение (8.76) при начальном
условии
![]() ,
находим
,
находим
![]() . (8.77)
. (8.77)
Из
условия
![]() ,
,
![]() определяем время торможения
определяем время торможения
![]() . (8.78)
. (8.78)
Пусть
![]() – момент инерции ротора двигателя, а
тормозной момент прикладывается
непосредственно к ротору. Составим
уравнение движения ротора в форме
– момент инерции ротора двигателя, а
тормозной момент прикладывается
непосредственно к ротору. Составим
уравнение движения ротора в форме
![]() ,
,
где
![]() – момент в передаточном механизме,
получаем
– момент в передаточном механизме,
получаем
![]() . (8.79)
. (8.79)
При
![]() момент
момент
![]() принимает наибольшее значение, равное
принимает наибольшее значение, равное
![]() .
Обычно стремятся к тому, чтобы
.
Обычно стремятся к тому, чтобы
![]() не превышал момента
не превышал момента
![]() ,
действующего в передаче при установившемся
движении. Тогда должно быть
,
действующего в передаче при установившемся
движении. Тогда должно быть
![]() ;
из этого условия можно выбрать величину
тормозного момента.
;
из этого условия можно выбрать величину
тормозного момента.