

ЛАБОРАТОРНАЯ РАБОТА № 10
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ
ИЗ КОЛЕБАНИЙ МАТЕМАТИЧЕСКОГО И ФИЗИЧЕСКОГО МАЯТНИКОВ
Принадлежности: математический и физический маятники, секундомер, линейка.
Цель работы: изучение законов колебательных движений на примере математического и физического маятников; определение ускорения свободного падения.
I. Гармонические колебания
Гармоническими колебаниями физической величины Х называется процесс изменения её во времени t по закону
![]()
где А - амплитуда колебания, Т - период колебания.
Величина
![]() носит название фазы,
носит название фазы,
![]() - начальной фазы.
- начальной фазы.
График такого колебания представлен на рис.1.
![]()

Рис.1.
Из определения гармонического колебания следует, что период колебания является наименьшим промежутком времени, по истечении которого движение в точности повторяется. Действительно,
![]()
За время t = Т совершается одно полное колебание. Амплитуда колебания А равна максимальному значению X. Величина соответствует фазе в начальный момент времени (t = 0) и называется начальной фазой.
Величина ![]()
называется круговой (циклической) частотой. Если начальная фаза
равна
=
![]() /2,
то уравнение гармонического колебания
записывается
/2,
то уравнение гармонического колебания
записывается
в виде:
Х = А cos(wt) (2)
II. Математический маятник
Математическим маятником называется колебательная система, состоящая из материальной точки, прикреплённой к концу идеально гибкой, нерастяжимой и невесомой нити, второй конец которой закреплён неподвижно в точке подвеса и находится во взаимодействиис другими телами. Исследуемый в лабораторной установке маятник схематически изображён на рис.2. Он представляет собой стальной шарик радиусом r на бифилярном подвесе: тонкая нить пропущена через центр шарика, концы нити закреплены на стойке. Длина подвеса L может регулироваться в пределах от нескольких сантиметров до 0.5 м.
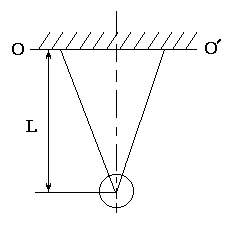
Момент инерции маятника складывается из момента инерции шарика и момента инерции нити подвеса относительно оси OO'. Пренебрегая моментом инерции нити, запишем момент инерции маятника относительно оси ОО' в виде:
Jo = Jc + mL2 = 2/5 mr2 + mL2 . (3)
Соотношение (3) следует из теоремы Гюйгенса-Штейнера, если учесть, что момент инерции однородного шара радиусом r и массой m относительно оси, проходящей через его центр, равен
Jc = 2/5 mr2 .
Рассмотрим случай, когда радиус шарика мал по сравнению с длиной подвеса: r << L .Тогда в (3) можно пренебречь слагаемым
2/5 Mr2, малым по сравнению с mL2, и положить
Jo = mL2 . (4)
В этом приближении J определяется,
очевидно, с небольшой систематической
погрешностью:
![]() (5)
(5)
которую в условиях опыта легко оценить. С учётом (4) период колебаний маятника можно записать в виде:
![]() (6)
(6)
Из формулы (6) следует, что период колебаний математического маятника не зависит от его массы m. Заметим, что формула (6) справедлива лишь для малых углов. Более точная формула для определения периода имеет вид:
![]() (6')
(6')
Длиной маятника является расстояние от центра тяжести до точки подвеса. Центр тяжести лабораторного маятника не совпадает
точно с геометрическим центром тяжести шарика, поэтому непосредственное измерение длины не представляется возможным. При определении ускорения силы тяжести рассматривают колебания маятника для разных его длин.
Если определить периоды колебаний двух маятников с различными длинами, то согласно формуле (6) можно записать:
![]() (7)
(7)
Откуда определяем
 (8)
(8)
Таким образом, для того, чтобы определить ускорение силы тяжести, достаточно знать длину математического маятника и соответствующий период колебаний в двух опытах.
III. Измерения.
а). Выполнение работы на электрофицированной установке:
1. Нижний кронштейн вместе с фотоэлектрическим датчиком установить в нижней части колонки, обращая внимание на то, чтобы верхняя грань кронштейна показывала на шкале длину не меньше 50 см. Зафиксировать фотоэлектрический датчик в избранном положении.
Поворачивая верхний кронштейн, поместить над датчиком математический маятник.
Вращая вороток на верхнем кронштейне установить выбранную длину математического маятника. Обратить внимание на то, чтобы черта на шарике была продолжением черты на корпусе фотоэлектрического датчика, стопорным винтом зафиксировать выбранную длину.
Привести математический маятник в движение, отклонив шарик на 4-5o от положения равновесия.
Нажать кнопку <СБРОС>.
После подсчёта измерителем N колебаний ( N=10_20 ) нажать
кнопку <СТОП>.
Время t измеряется не менее 5 раз и вычисляется ошибка измерений. Для данной длины отмечают положение нижнего края шарика по шкале - n1.
2. Поднять шарик на несколько см, укорачивая нить, и закрепить её стопорным винтом. По шкале определить положение нижнего края шарика - n2. Измерить период колебаний маятника Т2.
3. По формуле 9 определить периоды колебаний математического маятника для данных длин L1 и L2 .
Т = t/N (9)
4. Ускорение силы тяжести вычислить по формуле (8). Найти
ошибку определения величины g. Разность отсчётов n2 - n1 по шкале
даёт L2 - L1. Необходимо помнить, что углы отклонения маятника
должны быть малыми.
б). Выполнение работы на установке не оборудованной фотоэлектрическим датчиком:
1. Установить выбранную длину маятника.
2. Отклонить шарик от положения равновесия на угол 4-5о. Отпустить шарик, включив одновременно секундомер. После подсчета 10 - 20 колебаний, выключить секундомер. Измерение времени колебаний произвести не менее 5 раз и вычислить ошибку. Вычислить Т1.
3. Поднять шарик на несколько см., укорачивая нить. Повторить п.1-2. Вычислить Т2.
4. Ускорение силы тяжести найти по формуле (8). Определить ошибку измерений.
mex10-3.pcx 5 60
IV. Физический маятник.
Физическим маятником называется тело, укреплённое на неподвижной горизонтальной оси, не проходящей через его центр тяжести, и способное совершать колебания относительно этой оси (рис.3). Покажем, что маятник, отклонённый на малый угол a от положения равновесия, будет совершать гармонические колебания и найдем период колебаний такого маятника. Обозначим через J момент инерции маятника относительно оси О. Пусть точка C является центром тяжести. Силу тяжести F = mg можно разложить на две составляющие, одна из которых - F2, уравновешивается реакцией опоры. Под действием другой составляющей маятник приходит в движение:
Рис.3 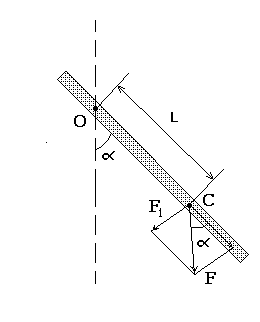
F1 = Fsinα (10)
На основании второго закона Ньютона для вращательного движения ( М = Jβ ) имеем:
Jβ = - F1L, (11)
где угловое ускорение равно:
![]()
L = CО - расстояние от точки подвеса до центра тяжести. Знак минус выбран потому, что момент силы М стремится вернуть маятник в положение равновесия, т.е. уменьшить угол a. Т.к. угол α мал, то sina ~ α и
F1 = mga . (13)
Подставляя (12) и (13) в уравнение (11) получим,
![]() (14)
(14)
Частным решением последнего дифференциального уравнения является:
α = А cos (wt), (15)
где
w =
![]() (16)
(16)
A - амплитуда колебаний маятника.
Дважды дифференцируя (15), получим:
![]() (17)
(17)
Подставляя (15) и (17) в (14), можно убедиться, что левая часть уравнения тождественно равна нулю.
Сравнивая (16) и (1), получим:
T =![]() (18)
(18)
Из уравнения (18) следует, что период колебания увеличивается с увеличением момента инерции.