

Практическая работа № 8
Системы автоматического управления трансмиссией.
Цель работы
Изучить назначение, основные принципы работы и конструктивные элементы электронных систем автоматического и электронного управления трансмиссией.
1. Теоретическая часть.
Сцепление служит для разъединения двигателя и силовой передачи при переключении передач и постепенного увеличения крутящего момента, передаваемого от двигателя на колеса при трогании. Сцепление позволяет соединять быстровращающийся вал с неподвижными колесами.
Автоматизация управления сцеплением упрощает работу водителя при трогании и переключении передач. В настоящее время применяются автоматизированные и автоматические системы управления. В первом случае в привод прямого действия устанавливают различного рода усилители для снижения усилия на педали сцепления. Во втором случае в сцеплении или приводе применяют систему автоматического управления. При этом отпадает необходимость в педали сцепления и, следовательно, в традиционном приводе. Автоматическое сцепление должно обеспечить возможность трогания с места с различной скоростью, осуществлять переключение передач без рывков и т.д.
При переключении передач сцепление необходимо выключать быстро. Сигналом на выключение сцепления в выполненных конструкциях является прикосновение водителя к рычагу переключения передач. Одновременно водитель снимает ногу с педали управления двигателем. По сигналу с рычага переключения передач при любых оборотах двигателя сцепление быстро выключается. По этому сигналу осуществляется воздействие на регулятор давления, вызывающее быстрое изменение давления, а следовательно уменьшение усилия на нажимном диске сцепления и его выключение.
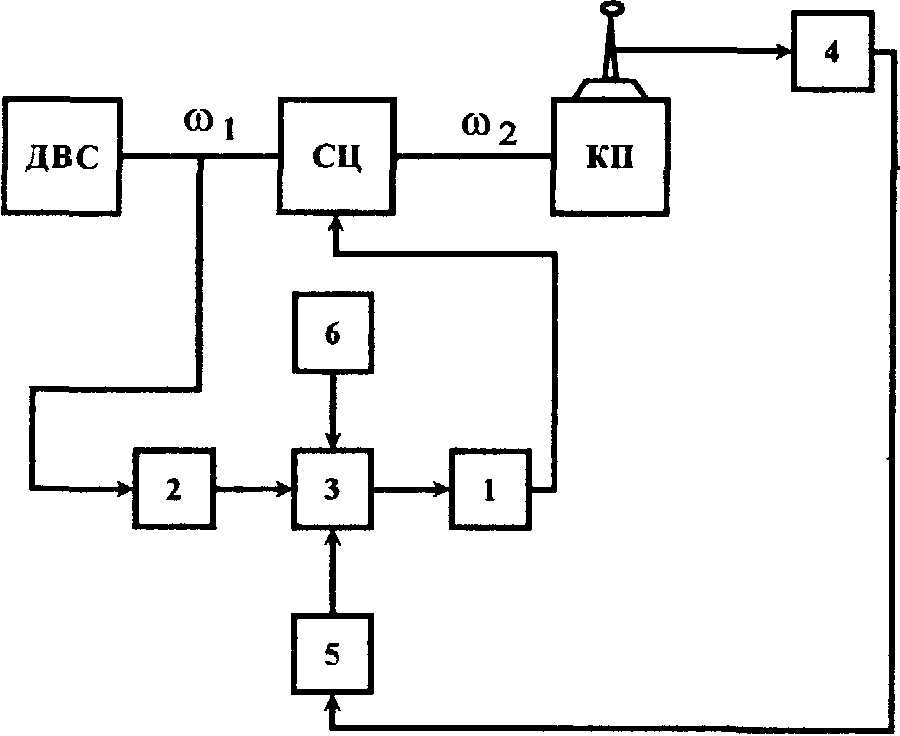
Рис.1. Функциональный состав системы автоматического управления сцеплением.
Таким образом, в состав любой системы автоматического управления сцеплением входят следующие обязательные элементы (рис. 1):
- исполнительное устройство 1, воздействующее на привод выжимного подшипника сцепления;
- измерительно-преобразующее устройство 2, обеспечивающее преобразование параметра задающего воздействия (угловой скорости вала двигателя или перемещения педали управления двигателем) в сигнал воздействия на регулятор давления;
- регулятор давления 3, обеспечивающий изменение давления рабочего тела в исполнительном устройстве в зависимости от изменения параметра задающего воздействия;
- контактное устройство 4, встроенное в рычаг переключения передач;
- устройство 5 изменения давления в приводе управления сцеплением при переключении передач;
- источник давления 6 рабочего тела в приводе управления сцеплением
Примером дальнейшего совершенствования систем автоматического управления сцеплением является микропроцессорная система управления сцеплением легкового автомобиля, управляющая подсистема которой приведена на рис. 2.
Управляющая подсистема содержит индукционные датчики частоты вращения коленчатого вала Дч в, частоты вращения ведомого вала сцепления Дсц, частоты вращения ведомого вала коробки передач Дкп, потенциометрический датчик положения дроссельной заслонки Дп.д.з, двухпозиционный датчик положения рычага переключения передач Дпр.
Сигналы с частотных датчиков через соответствующие согласующие устройства (информационные преобразователи ИнП1...ИнПЗ и преобразователи частота —код ПЧК1...ПЧКЗ) поступают через устройство ввода (порт 1) в микропроцессор МП. Сигнал с датчика Дпдз в аналого-кодовом преобразователе АКП преобразуется в код и подается в МП. Сигнал с двухпозиционного датчика Дп..р. является одноразрядным двоичным кодом и поступает непосредственно в МП. Микропроцессор выполняет функции микроконтроллера (устройства управления и обработки информации). Сформированные в микроконтроллере команды в виде кодовых сигналов поступают на усилители мощности УМ1, УМ2 и далее на электромагниты Yl, Y2 клапанов B1, В2. Исполнительным механизмом системы является вакуумная камера ВЗ с мембраной, шток которой через рычаг воздействует на механизм переключения сцепления, выполняющий функции рабочего органа. Дополнительная энергия для исполнительного вакуумного мембранного механизма поступает из выпускного коллектора двигателя, соединенного через обратный клапан В4 с вакуумным ресивером ВР. Устройства, стоящие на выходе МП, выполняют функции энергетического преобразователя и преобразуют кодовые электрические сигналы в аналоговый пневматический сигнал, который вакуумной камерой преобразуется в усилие, передаваемое на сцепление.
Энергетический преобразователь работает следующим образом. При срабатывании электромагнита Y1 открывается клапан В1 и вакуумный ресивер ВР соединяется с внутренней полостью вакуумной камеры ВЗ. При закрытии клапана В1 связь вакуумной камеры В3 с ВР прерывается. При срабатывании электромагнита Y2 открывается клапан В2, что приводит к соединению вакуумной камеры ВЗ с атмосферой. При закрытом клапане В2 эта связь прерывается.
Таким образом, при открытии клапана В1 увеличивается разрежение в полости вакуумной камеры ВЗ, а при открытии клапана В2 давление повышается. Когда оба клапана закрыты, давление в полости камеры остается неизменным.
Давление в камере определяется временем включения клапанов. В зависимости от разрежения (давления) в полости камеры изменяется положение ее штока и соответственно нажимное усилие и момент, передаваемый сцеплением.
Основной задачей системы управления является регулирование по заданному закону момента сцепления Мси в зависимости от угла открытия дроссельной заслонки, частоты вращения коленчатого вала, его ускорения (замедления) и включения в коробке передач, той или иной передачи.
Обработка информации, получаемой от всех датчиков, выполняется микропроцессором. В ППЗУ микропроцессора записывается программа, обеспечивающая выполнение алгоритма управления. ОЗУ микропроцессора используется для промежуточных вычислений текущих значений измеренных величин и других данных, требуемых для функционирования микропроцессорной системы.
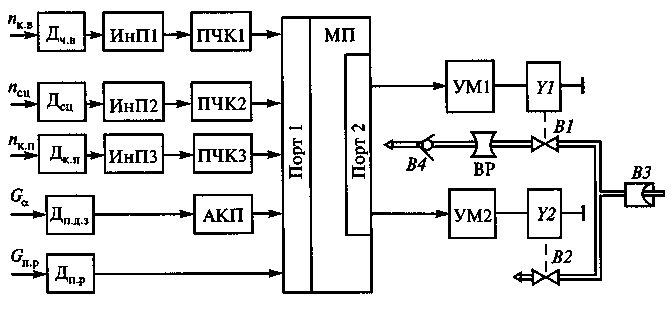
Рис. 2. Структурная схема микропроцессорной системы управления сцеплением автомобиля
Работает система в реальном масштабе времени. Для выдачи в определенное время команд управления и организации распределения команд во времени используется таймер микропроцессора. Сформированные команды в виде широтно-импульсных сигналов через устройства вывода поступают на усилители мощности и управляют работой клапанов В1 и В2.
Команду на принудительное выключение сцепления в процессе переключения передач МП вырабатывает при поступлении сигнала от датчика положения рычага переключения передач, контакты которого замыкаются, когда водитель прикладывает усилие к рычагу.
Алгоритм функционирования системы заключается в следующем. Перед троганием автомобиля с места водитель воздействует на рычаг переключения передач. При этом срабатывают контакты датчика положения рычага. По этому сигналу включается электромагнит клапана В1. Клапан открывается, полость вакуумной камеры В4 соединяется с вакуумным ресивером ВР. Сцепление выключается.
После включения передачи водитель снимает руку с рычага переключения передач и плавно нажимает на педаль управления двигателем. Сигнал с датчика положения дроссельной заслонки Дп.д.з увеличивается. Пропорционально углу поворота дроссельной заслонки МП формирует сигнал заданной частоты вращения вала двигателя п3. Заданная частота вращения сравнивается с вычисленным значением фактической частоты вращения вала двигателя пкв , в результате чего определяется сигнал ошибки управления ε = п3-пкв. С использованием сигнала ошибки управления и вычисляемого сигнала скорости изменения ошибки управления, а также положения дроссельной заслонки формируется управляющий сигнал, который преобразуется в последовательность импульсов тока, подаваемых на электромагниты Y1 и Y2. При ε > 0 общая продолжительность открытого состояния клапана В2 оказывается меньше общей продолжительности открытого состояния клапана В1, в силу чего момент Мсп, передаваемый сцеплением, уменьшается, нагрузка на двигатель снижается и частота вращения вала двигателя увеличивается, и, наоборот, при ε < 0 общая продолжительность открытия атмосферного клапана оказывается больше общей продолжительности открытия вакуумного клапана, вследствие чего момент Мсц увеличивается, нагрузка на двигатель растет, частота вращения коленчатого вала двигателя уменьшается. Для улучшения качества процесса регулирования и уменьшения общего времени включения сцепления в начале хода дроссельной заслонки, несмотря на то что ε >0, принудительно на 0,15 с включается электромагнит В2, управляющий атмосферным клапаном, за счет чего сцепление частично включается. В результате этого исключается резкое увеличение частоты вращения коленчатого вала.
Таким образом, за счет автоматического регулирования момента, передаваемого сцеплением, частота вращения коленчатого вала двигателя поддерживается на заданном уровне. Одновременно в микропроцессоре определяется разность частот вращения ведущих и ведомых частей сцепления εсц = пкв.- псц. Рассматриваемая система управления является системой автоматического регулирования по отклонению истинной частоты вращения от заданной. Причем последняя является функцией угла открытия дроссельной заслонки.
По мере уменьшения εсц увеличивается общее время включения атмосферного клапана. При εсц = 0 подается сигнал на блокировку сцепления, т.е. включается только атмосферный клапан, что вызывает перемещение штока в крайнее правое положение, соответствующее полному включению сцепления. Это уменьшает износ узлов привода сцепления.
Темп включения сцепления при переключении на высшие и низшие передачи различный. При переключении на высшие передачи разность εсц>0 и имеет небольшую величину, поэтому сцепление включается быстро. При переключении на низшие передачи εсц< 0 и достигает большой величины, особенно если переключение осуществляется через передачу. В этом случае темп включения сцепления замедляется.
Увеличение частоты вращения вала двигателя при воздействии водителя на педаль управления двигателем приводит к уменьшению разности частот вращения ведущей и ведомой частей сцепления. При εсц = 0 включается атмосферный клапан, что приводит к полной блокировке сцепления. Наличие в системе датчика частоты ведомого вала коробки передач позволяет в МП по соотношению частот вращения ведомых частей сцепления и выходного вала коробки передач определить, какую передачу включил водитель, и в зависимости от этого корректировать темп включения сцепления.
Для плавного изменения момента Мсп при его регулировании, осуществляемом открытием и закрытием клапанов В1 и В2, должны быть исключены значительные колебания разрежения в полости вакуумной камеры ВЗ. В рассматриваемой системе управления это достигается за счет непрерывно повторяющегося открытия и закрытия данных клапанов на короткие периоды. При этом увеличение момента Мсп реализуется за счет того, что общая продолжительность открытого состояния клапана В1 оказывается больше общей продолжительности открытого состояния клапана В2. Если же необходимо уменьшить момент Мси, то это обеспечивается вследствие увеличения общей продолжительности открытого состояния клапана В2 (по сравнению с клапаном В1).
После того как значение МС11 устанавливается на заданном уровне, оба клапана закрываются.
Если во время разгона автомобиля водитель постепенно увеличивает открытие дроссельной заслонки, то это приводит к повышению п3, вследствие чего и частота вращения п к в также возрастает.
При этом для повышения момента Мсп система управления по мере роста частоты вращения п кв увеличивает общее время открытого состояния воздушного клапана В1, через который полость вакуумной камеры соединяется с атмосферой. Работа клапанов корректируется также в зависимости от значения ускорений (замедления) коленчатого вала и ведущего вала коробки передач.
По мере увеличения п3 возрастает продолжительность импульсов тока, проходящего через обмотку электромагнита Y2, и уменьшается продолжительность импульсов тока, проходящего через обмотку электромагнита Y1. В результате относительная продолжительность открытого состояния воздушного клапана возрастает, а вакуумного клапана В1 — снижается, что и обеспечивает требуемое увеличение Мсц при повышении икв.
В результате поступления в процессор информации от датчиков частоты вращения ведущего и ведомого валов коробки передач система управления определяет, какая из передач включена в каждый момент времени. Это позволяет в зависимости от порядка переключения передач реализовать различный темп включения сцепления после окончания переходного процесса. Данная особенность системы управления позволяет после перехода с высших на низшие передачи уменьшить темп включения сцепления, что обеспечивает плавность движения автомобиля в процессе переключения передач.
По приведенному описанию составляется блок-схема алгоритма управления, на основе которой разрабатывается программа управления, записываемая в память микропроцессора.
Применение микропроцессорных систем управления позволяет реализовать оптимальные алгоритмы управления двигателем и сцеплением. В ранее рассмотренных системах не предусматривалось автоматическое воздействие на двигатель в процессе переключения передач. Поэтому процесс переключения передач в таких системах во многом определяется квалификацией водителя. Координация управления ДВС и сцеплением позволяет повысить качество управления.
Выравнивание частоты вращения ведущих и ведомых валов сцепления после переключения с высшей передачи на низшую с помощью регулирования ДВС снижает время буксования сцепления и уменьшает вероятность появления в момент блокировки сцепления инерционных нагрузок в трансмиссии.
Для этого определяют разность частот вращения коленчатого вала и ведомого вала сцепления. По этому сигналу формируется управляющее воздействие на привод дроссельной заслонки. В таких системах можно достичь очень небольшого времени буксования сцепления. Однако за время переходного процесса происходит отключение колес от двигателя, что приводит к снижению скорости. Для сохранения скорости на постоянном уровне при включении сцепления необходимо, чтобы оно передавало момент, равный приложенному к нему моменту сил сопротивления движению автомобиля Мс. Для этого в качестве управляемого параметра необходимо использовать момент вращения. Однако в настоящее время еще не созданы простые и дешевые датчики крутящего момента. Поэтому для реализации таких систем используют другие параметры, функционально связанные с моментом на валах агрегатов АТС.
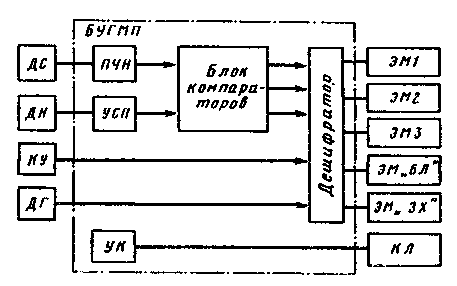
Рис. 3. Гидромеханическая передача (ГМП) с электронным управлением
Гидромеханическая передача (ГМП) с электронным управлением предназначена для применения на автобусах. Ее использование облегчает работу водителя, особенно при движении в городских условиях. Применение электронного управления упрощает конструкцию гидравлических и механических элементов передачи, повышает надежность системы в целом и позволяет оптимизировать закон переключения передач, обеспечивая тем самым снижение расхода топлива.
В ГМП входят (рис. 3):
ДС — датчик скорости, вырабатывающий сигнал переменного тока, частота которого пропорциональна частоте вращения выходного вала ГМП;
ДН — датчик нагрузки двигателя, представляющий собой связанный с топливоподающим органом двигателя ступенчатый переключатель на три положения. Первое положение соответствует нагрузке 0... 50 %, второе — 50 ... 100 %, третье — более 100 % (так называемый режим кик-даун);
КУ — контроллер управления — ступенчатый переключатель на пять положений;
ДГ— контактный датчик включения гидрозамедлителя;
БУГМП — электронный блок управления;
ЭМ1, ЭМ2; ЭМЗ, ЭМ "ЗХ", ЭМ "БЛ" — соответственно исполнительные электромагниты включения первой, второй и третьей передач, передачи заднего хода и блокировки гидротрансформатора;
КЛ — контрольная лампа индикации аварийного режима.
Сигнал датчика скорости ДС поступает в ПЧН, где преобразуется в сигнал постоянного тока, напряжение которого пропорционально частоте входного сигнала. Напряжение с выхода ПЧН подается на вход блока компараторов. Этот блок содержит три компаратора, сигнальные входы которых объединены. Опорным сигналом для компараторов является сигнал, формируемый в устройстве сдвига порогов УСП. Каждый из компараторов настроен таким образом, что при увеличении (или уменьшении) скорости автобуса происходит поочередное переключение компараторов. При срабатывании первого компаратора формируется команда на включение второй передачи. Второй и третий компараторы соответственно формируют команды на включение третьей передачи и блокировки БЛ гидротрансформатора. Отсутствие сигналов на входах компараторов будет свидетельствовать о включении первой передачи. Устройство сдвига порогов изменяет пороги срабатывания компараторов в зависимости от положения датчика нагрузки двигателя. При увеличении нагрузки переключение компараторов будет происходить при больших скоростях движения автобуса.
Команды на переключение передач с выходов блока компараторов поступают на выходы дешифратора. Сюда же подаются командные сигналы с КУ и с ДГ. В зависимости от положения контроллера управления дешифратор обеспечивает автоматическое переключение передач по командам блока компараторов, принудительное включение первой передачи, передачи заднего хода или отключение коробки передач ("Нейтраль"). При включении гидрозамедлителя обеспечивается принудительная блокировка гидротрансформатора.
Узел контроля УК обеспечивает защиту от аварийных режимов при коротком замыкании или обрыве в цепи датчика скорости и при непредусмотренных комбинациях одновременного включения двух электромагнитов. При возникновении аварийных режимов УК снимает напряжение питания с электромагнитов и включает контрольную лампу КЛ.