

Контрольная работа № 2 по ОКТ
.doc
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра программного обеспечения информационных технологий
Факультет НиДО
Специальность ПОИТ
Контрольная работа № 2
по дисциплине «Основы компьютерной техники»
Вариант № 28
Выполнил студент: ********
группа ******
Зачетная книжка № ******-28
Электронный адрес ******@****.***
Минск 2010
Задание 2.1
Построить цифровой автомат типа Мили для ГСА на рис. 1, используя RS –триггер.

Рис. 1.
Решение:
Граф- схема алгоритма:

Объединенная кодированная таблица переходов и выходов цифрового автомата:
|
N |
Начало пути |
Конец пути |
Логич. условие |
Выход. сигнал |
Управление памятью |
|||||||
|
п.п |
A(t) |
код A(t) |
A(t+1) |
код A(t+1) |
qS1 |
qR1 |
qS2 |
qR2 |
qS3 |
qR3 |
||
|
1 |
A1 |
001 |
A2 |
010 |
1 |
|
0 |
0 |
1 |
0 |
0 |
1 |
|
2 |
A2 |
010 |
A3 |
011 |
|
|
0 |
0 |
0 |
0 |
1 |
0 |
|
3 |
|
|
A2 |
010 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
4 |
A3 |
011 |
A4 |
100 |
1 |
|
1 |
0 |
0 |
1 |
0 |
1 |
|
5 |
A4 |
100 |
A5 |
101 |
1 |
|
0 |
0 |
0 |
0 |
1 |
0 |
|
6 |
A5 |
101 |
A5 |
101 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
7 |
|
|
A5 |
101 |
|
– |
0 |
0 |
0 |
0 |
0 |
0 |
|
8 |
|
|
A6 |
110 |
|
|
0 |
0 |
1 |
0 |
0 |
1 |
|
9 |
|
|
A6 |
110 |
|
|
0 |
0 |
1 |
0 |
0 |
1 |
|
10 |
A6 |
110 |
A7 |
111 |
1 |
|
0 |
0 |
0 |
0 |
1 |
0 |
На основании составленной таблицы логические выражения для выходных сигналов и сигналов управления памятью имею вид:
![]() (1,3)
(1,3)
![]() (10)
(10)
![]() (8,9)
(8,9)
![]() (4)
(4)
![]() (1,2,3,5,6,10)
(1,2,3,5,6,10)
![]() (8,9)
(8,9)
![]() (2,5,6)
(2,5,6)
![]() (8)
(8)
![]() (2, 5, 6)
(2, 5, 6)
![]() (9)
(9)
![]() (4)
(4)
![]() (10)
(10)
![]() (4)
(4)
![]() (1,8,9)
(1,8,9)
![]() (4)
(4)
![]() (2,5,10)
(2,5,10)
![]() (1,4,8,9)
(1,4,8,9)
Логическая схема реализующая цифровой автомат Мили на базе ПЛМ:
x7 &
y2
y4






y9
y10





&
y11

x3
y12







y13

y20
y15





&
x2
y21


y27






yk































































































Q1 S TT
qS3
qR3

qS2
qR2


qS1 R 1
qR1

C


Q2
S TT




R 2
СИ C

Q3



S TT

R


C 3










Задание 2.2
Написать микропрограмму, соответствующую ГСА на рис. 1, с учетом множества микроопераций (Y=30), множества проверяемых условий (Х=31), ёмкости запоминающего устройства (ЗУ) = 1000 и начального адреса размещения микропрограммы (МП) в ЗУ = 530.
В каждом адресе запоминающего устройства может храниться 16 бит информации. Обозначение ук соответствует микрооперации, обозначающей последнюю микрокоманду в микропрограмме.
Если это допускает длина микрокоманды, использовать модификатор дисциплины перехода.
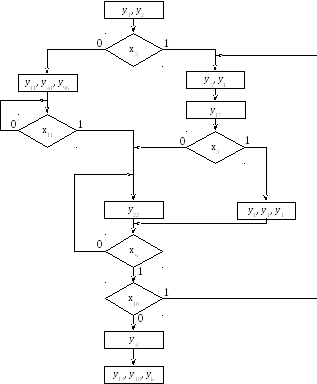
Рис. 1.
Решение:
Пронумеруем вершины

Объект управления характеризуется следующими параметрами:
множество проверяемых условий X = {x1,x2, .. x31};
множество выполняемых микроопераций Y = {y1,y2, .. y30, yk};
ёмкость памяти для записи микропрограмм Vзу= 1000;
длина ячейки памяти L = 16 бит;
начальный адрес размещения микропрограммы в памяти − Ан=530.
Исходя из характеристик управляемого, объекта следует:
– длина кода для кодирования микроопераций равна к=5, так как количество выполняемых в управляемом объекте микроопераций равно 30;
– длина кода для кодирования условий равна р = 5, так как количество проверяемых условий в управляемом объекте равно 31;
– длина кода адреса равна десяти, так как количество адресов в памяти, учитывая, что длина адресуемой ячейки равна 16 битам (т.е. двум байтам), равно 1000.
Так как все биты микрокоманды уже заняты, мы не можем включить в микрокоманду перехода модификатор дисциплины перехода. Поэтому будем использовать во всех случаях первую дисциплину перехода.
При этом адрес следующей микрокоманды Ас формируется как:
АT + 1, если хi =1;
Ас =
А, если хi =0,
где Ат - адрес текущей выполняемой команды.
Таким образом, формат микрокоманд для данного управляемого объекта имеет следующий вид:
МКО Т Y1 Y2 Y3
-
0
1………5
6………… 10
11…………15
МКП Т Х А
-
0
1……….5
6…………………………….15
Формат операционной микрокоманды (МКО) имеет длину 16 бит и включает:
– поле типа микрокоманды (T), имеющее длину в один бит, занимает 0-ой разряд микрокоманды; в этом поле для данного типа микрокоманды записано значение «1»;
– поле первой микрооперации (Y1), которое занимает разряды с 1-го по 5;
– поле второй микрооперации (Y2), которое занимает разряды с 6-го по 10;
– поле третьей микрооперации (Y3), которое занимает разряды с 11-го по 15;
Формат микрокоманды перехода (МКП) имеет длину 16 бит и включает:
– поле типа микрокоманды (Т), имеющее длину в один бит и занимающее 0-ой разряд микрокоманды; в этом поле для данного типа микрокоманды записано значение «0»;
– поле проверяемого условия (Х), которое занимает разряды с 1-го по 5;
– поле адреса (А), которое занимает разряды с 6-го по 15;
Закодируем yk как 11111, y41 как 10000 и y96 как 01001, остальные микрооперации и условия закодируем двоичным представлением их индексов.
Микропрограмма, реализующая ГСА, приведена в форме таблицы:
|
N п.п. |
N вершины |
Адрес расположения микрокоманды в ЗУ |
Код микрокоманды |
Примечание |
|
1 |
1 |
1000010010 |
1.00001.00010.00000 |
|
|
2 |
2 |
1000010011 |
0.00101. 1000011011 |
3 |
|
3 |
10 |
1000010100 |
1.00101.00001.00000 |
|
|
4 |
11 |
1000010101 |
1.10001.00000.00000 |
|
|
5 |
12 |
1000010110 |
0.00011. 1000011101 |
5 |
|
6 |
13 |
1000010111 |
1.00001.00001.00001 |
|
|
7 |
6 |
1000011000 |
0.01001. 1000011101 |
5 |
|
8 |
7 |
1000011001 |
0.01010. 1000011111 |
8 |
|
9 |
– |
1000011010 |
0.00000. 1000010100 |
10 |
|
10 |
3 |
1000011011 |
1.01011.10000.01001 |
|
|
11 |
4 |
1000011100 |
0.01011. 1000011100 |
4 |
|
12 |
5 |
1000011101 |
1.10110.00000.00000 |
|
|
13 |
– |
1000011110 |
0.00000. 1000011000 |
6 |
|
14 |
8 |
1000011111 |
1.00100.00000.00000 |
|
|
15 |
9 |
1000100000 |
1.01101.10010.11111 |
|