

Питання №58
Цифрові частотоміри середнього значення частоти.
В цифрових частотомірах, вимірюючих середнє значення частоти за час Тц., кількість періодів невідомої частоти fx підраховуються за невідомий проміжок часу Тц. структурна схема цифрового частотоміра, вимірюючого середнє значення за Тц значення частоти, показаний на рисунку 2.11.
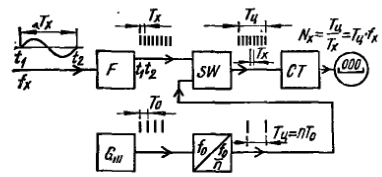
Рисунок 2.11 – Структура цифрового частотоміра з вимірюванням середнього за час Тц значення частоти
Розглянемо призначення кожного елемента цієї схеми. Формувач Ф перетворює вхідну напругу частоти fx в послідовність імпульсів з періодом повторень Тц=1/ fx. Час Тц. встановлюється генератором імпульсів з періодом повторень То. і дільником частоти імпульсів з відповідним коефіцієнтом ділення n. На виході дільника частоти отримуємо імпульси з періодом повторень Тц.-nТ0.. Ці імпульси управляють ключем SW, який відпирається на час Тц. Через відкритий ключ протягом Тц. кантуються імпульси з періодом повторень Тх. і проходять до лічильника імпульсів і підраховуються ним. Число імпульсів, підчитаних лічильником, рівне
.
 (2.34)
(2.34)
якщо Тц=1 с, тоді підставивши це значення в формулу (2.34), отримаємо :
Nx=fx.
Показання лічильника чисельно рівні середньому значенню виміряної частоти fx за час Тц .
Похибка цифрового частотоміра, вимірюющого середнє значення частоти, виникають із-за наступних причин :
Із-за нестабільності часового проміжку Тц , яка визначається нестабільністю генератора імпульсів і може бути знижена до 10-9 і менше;
Із-за квантування, так як перший або останній квантуючий імпульс, в залежності від моменту подачі старт - або стоп-імпульсів з інтервалом Тц, може не попасти на вихід лічильника.
Відносна похибка від квантування :
 (2.35)
(2.35)
При відсутності синхронізації імпульсів Тх з старт-імпульсом відносне значення середнього квадратичного відхилення похибки наступне :
 (2.36)
(2.36)
При умові синхронізації імпульсів старт-імпульсом з першим імпульсом Тх, формула (2.36) прийме наступний вигляд :

При умові, що Тц =1 с формула (2.35) матиме вигляд :

Максимальна сумарна відносна похибка рівна :

Граничне значення відносної похибки від квантування залежить від частоти :
 (2.37)
(2.37)
Цю похибку, формула (2.37), можна зменшити , якщо сукупність одиничних імпульсів помножити перед сумуванням на вагову функцію. Таким чином , при трикутній ваговій функції після усереднення отримаємо :

Похибка від квантування таким чином може біти значно зменшена , оскільки добуток Тwfx значно більше 1. Далі розглянемо і інші способи підвищення точності частотоміра з умовами дії похибок.
Похибка від квантування зменшується вдвоє, якщо підрахувати число півперіодів, тобто , якщо генерувати імпульси при переході кривої напруги через нульове значення в обох напрямках.
Отже зі зменшенням частоти похибка вимірювання збільшується. За низьких частот для зменшення похибки можна збільшити Тц, але при цьому збільшиться час вимірювання, що не завжди допустимо. Крім цього, при зміні fх під час збільшення Тц призводить до збільшення динамічної похибки.
Верхня границя вимірювання частоти обмежується максимальною швидкістю лічби лічильника імпульсів, яка досягає декількох гігагерц. При Тц=1 с ємність лічильника імпульсів Nи повинна бути не менше 1010.
Розширення частотного діапазону цифрових частотомірів, вимірюючи безпосередньо частоту в сторону більш високих частот, виконується, наприклад, відніманням з fx відомої частоти f0 за допомогою змішувача і наступного вимірювання різниці частоти. Сигнал з потрібною частотою f0 зазвичай отримується від вмонтованого синтезатора частот, працюючого за принципом множення частоті генератора квантуючих імпульсів за допомогою схеми ФАПЧ або формуванням гармонік за допомогою нелінійного кола з наступною фільтрацією перебудованих або перемкнутих фільтрів.
Нижня границя вимірювання обмежується допустимою похибкою квантування, яка знаходиться за формулою :
 (2.38)
(2.38)
При δ=0,1% і Тц=1 с формула (2.38) прийме значення :
fхmin=1000 Гц.
Нижня границя вимірювання частоти можна знизити, примінивши множник або збільшуючи час Тц .
В універсальних цифрових частотомірах передбачається можливість зміни відношення двох частот fx і fy . Схема такого частотоміра приведена на рисунку 2.12.
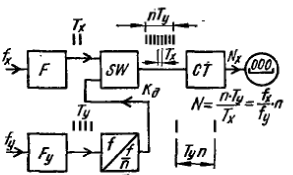
Рисунок 2.12 – Структура цифрового частотоміра маючого відношення двох частот
Розглянемо принцип його роботи . Якщо fx>>fy , то імпульсами з періодом повторення Ту після формувача Fy можна управляти ключем SW, який буде відкритий протягом інтервалу часу , рівний :

В цьому випадку цифровий відлік лічильника імпульсів, рахую чого імпульси з періодом повторень

рівний
 (2.39)
(2.39)
Якщо частоти fx і fy близькі за значенням , то імпульси після формування Fy спрямовуються в дільник частоти з коефіцієнтом ділення n. Отже маємо :

При вимірюванні низьких частот з потрібною в більшості випадків високою точністю необхідно досить значний час вимірювання. Тому виникла необхідність створення цифрового частотоміра низьких частот з малим часом вимірювання Тц . В даний час ця задача вирішена використанням цифрового дільника в мікропроцесорі взаємо-зворотнім процесом , тобто отриманням зворотної величини :

Можливий також і один з наступних способів :
Множення вимірюваною частотою fx в k раз і наступні вимірювання частоти kfx,для цього кола використовуються наступні множники частоти з k=100 або k=1000:
П
 еретворення
Тх Ux і наступних визначень цифрового
значення 1/ Ux ;
еретворення
Тх Ux і наступних визначень цифрового
значення 1/ Ux ;Визначення періоду Тх , створення проміжної частоти числове значення якого рівне числовому значенню цього періоду з наступними вимірюванням періоду Тn, числове значення якого рівне числовому значенню fx ;
Вимірювання низької частоти fx поблизу номінального значення fxн цифровим частотоміром номінальних значень ;
Вимірювання відносного відхилення вимірюваної частоти в процентах fxн цифровим процентним частотоміром.
Аналогові фазометри
Аналогові однофазні фазометри будують на основі логометричних вимірювальних механізмів електродинамічної та електромеханічної системи. На рисунку 2.13 зображена конструкція однофазного електродинамічного фазометра.
Розглянемо
складові частини цієї конструкції.
Рухлива частина складається з двох
котушок Б1 і Б2, які жорстко сполучені
під кутом
 . По цих котушках протікають струми
. По цих котушках протікають струми
 і
і
 відповідно.
– кут повороту рухливої частини.
відповідно.
– кут повороту рухливої частини.
 і
і
 – сила взаємодії нерухомої і рухливої
котушок Б1 і Б2
– сила взаємодії нерухомої і рухливої
котушок Б1 і Б2
Складові
 та
та
 створюють моменти :
створюють моменти :
 ,
,
де
 -
струм нерухомої частини ;
-
струм нерухомої частини ;
 -
взаємна індуктивність між нерухомою
котушкою А та секцією Б1.
-
взаємна індуктивність між нерухомою
котушкою А та секцією Б1.
Рисунок 2.13 - Конструкція однофазного електродинамічного фазометра.
Стан рівноваги моменту наступає тоді коли виконується умов а, що :
 ,
,
а також при виконанні умови,

Загальне рівняння моменту матиме вигляд:
 (2.40)
(2.40)
де
–
струм навантаження
 ,
який проходить через котушку А.
,
який проходить через котушку А.
 – струми
рухливих котушок
– струми
рухливих котушок
 ;
;
– кут, під яким закріплені ;
 –
кут
відхилення.
–
кут
відхилення.
У правій частині об'єднані геометричні параметри, а в лівій частині – електричні. У загальному випадку можна сказати, що :
 .
.
Розглянемо тепер використання електродинамічного логометра для зрушення фаз.
Як ми вже згадували вище, рівняння логометра має вигляд :
Ліва частина – електричні параметри, права – геометричні. Для виміру зрушення фаз необхідно виконати наступні умови:
Рівність похідних
 .
.
 .
.
Електричний кут між струмами має дорівнювати геометричному куту .
При вимірі частоти з'являється частотна похибки. Крім того, напруга може бути рівною.
Схема включення електромагнітного логометра для вимірювання зображена на рисунку 2.14.
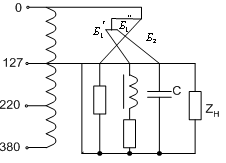
Рисунок 2.14 - Схема включення логометра для вимірювання здвигу фаз
Принци
її роботи полягає в наступному. Котушка
 включена у вигляді двох секцій
включена у вигляді двох секцій
 і
і
 . При збільшенні частоти, струм секції
зменшується, зменшується кут повороту.
В той же час струм секції
збільшується і компенсується зміна
частоти.
. При збільшенні частоти, струм секції
зменшується, зменшується кут повороту.
В той же час струм секції
збільшується і компенсується зміна
частоти.
Технічні характеристики:
Клас точності: 0,5; 0,2.
Номінальна частота 50Гц.

Рухлива
частина не має котушок, до яких приводиться
 . Слабкий захист від зовнішніх полів,
так само як і в ЕДП. Способи захисту:
екранування, астазування.
. Слабкий захист від зовнішніх полів,
так само як і в ЕДП. Способи захисту:
екранування, астазування.
Обертальний момент :
 (2.41)
(2.41)
де - струм нерухомої котушки ;
 –
індуктивність
котушки.
–
індуктивність
котушки.
Використовуючи формулу (2.41) можна знайти обертальний момент за формулою :

А також :

На рисунку 2.15 зображена принципова схема однофазного фазометра. Нерухомі котушки А-а включені в ланцюг послідовно і обтікаются струмом I, що створює магнітний потік Ф.
У коло рухливої котушки Б1 включене активний опір R, а в ланцюг котушки Б2 індуктивності L. Ці опори і рухливі котушки, сполучені усередині приладу за вказаною на малюнку схемою, складають паралельний ланцюг фазометра.
Рисунок 2.15– Принципова схема однофазного електродинамічного фазометра.
На рисунку 2.16 приведена векторна діаграма такого приладу.
Рисунок 2.16– Векторна діаграма однофазного фазометра
В цій діаграмі U - вектор прикладеної до паралельного ланцюга напруги; I-вектор струму в послідовному ланцюзі, що відстає від напруги на кут γ, величина і знак якого залежать від характеру навантаження приймача;Ф- вектор потоку нерухомих котушок, співпадаючий по фазі з вектором струму І (діаграма справедлива для електродинамічного вимірювального механізму, що не має стали, але не для феродинамічного, в якому наявність сталі обумовлює зрушення по фазі між векторами струму І і потоку Ф). Вектор струму І1 в котушці Б1, збігається по фазі з напругою U, оскільки індуктивним опором цієї котушки в порівнянні з активним опором всьому ланцюгу можна нехтувати, а вектор струму І2 відстає від вектора U на кут β, близький до 90°, з огляду на те, що в ланцюг котушки Б2 включений великий індуктивний опір ωL. Якщо покласти, таким чином, з чималим наближенням, що кут β = 900, а також, що кут γ між плоскістю котушок Бl і Б2зроблений рівним 900, то, можна написати :

якщо I1=I2 , то
 =
= .
.
З вираження виходить, що просторове положення рухливої частини приладу визначається виключно величиною кута зрушення фаз в ланцюзі навантаження між струмом і напругою і не залежить від значень струму і напруги; отже, такий прилад може служити фазометром. Шкалу фазометра зазвичай наносять в одиницях значень φ або COS(φ) ; у першому випадку шкала рівномірна, а в другому - нерівномірна. Для здобуття більш рівномірної шкали в одиницях COS(φ) удаються до різних способів, наприклад: котушки Б1 і Б2 скріпляють під кутом, меншим 900, або підбирають параметри їх ланцюгів так, щоб І1≠ І2; У всіх цих випадках залежність між відхиленням рухливої частини і кутом зрушення між струмом і напругою має складніший вигляд. Наявність в ланцюзі рухливої котушки Б2 великого індуктивного опору ωL робить показання приладу залежними від частоти, оскільки при цьому змінюються струм І1 і кут β. Тому, як правило, фазометри градуюють при певній частоті.
У деяких фазометрах в ланцюг котушки Б1, для усунення погрішності від змін частоти, вводять регулює мий активний опір, значення якого керують при вимірах відповідно до частоти струму в ланцюзі.
З вираження виходить, що при зміні знаку кута φ (індуктивний або ємкісною характер навантаження) змінюється і знак кута відхилення рухливої частини. Тому електродинамічні фазометри будують з двосторонньою шкалою з нулем по середині, а характер навантаження наголошується на його шкалі знаками "інд." або "ємн. ", або "генератор" і "двигун" .