

ТАУ , 12 вариант , ИИТ заочка
.docx
КОНТРОЛЬНАЯ РАБОТА

Исходные данные к контрольной работе
Структурная схема линейной САУ представлена на рис. 1, где соответствующие передаточные функции имеют вид апериодических звеньев:
Рис. 1



Параметры
Т1 = 0,05;
Т2 = 0,6;
Т3 = 0,1;
К1 = 14,5;
К3 = 1,4.
Величина коэффициента К2 выбирается далее из условия устойчивости.
Решение.
-
Передаточные функции находятся с использованием правил структурных преобразований |1, с. 27 - 34].




-
Если найдена главная передаточная функция замкнутой системы в виде
 где
где
 - общий коэффициент передачи прямой
цепи, D(s) - полином относительно s,
то характеристическое уравнение
замкнутой системы имеет вид:
- общий коэффициент передачи прямой
цепи, D(s) - полином относительно s,
то характеристическое уравнение
замкнутой системы имеет вид:


-
Определение частотных характеристик и их построение.


Рис. 2 График АФЧХ

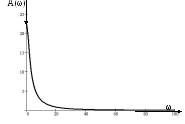
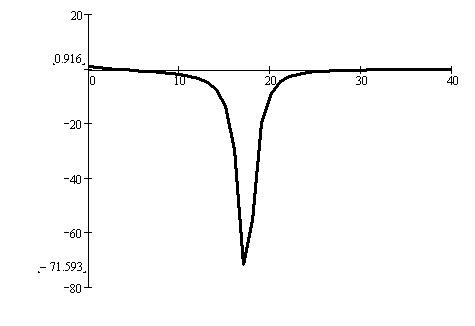
Рис. 3. График АЧХ.

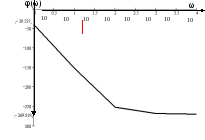
Рис. 4. График АФЧХ

ω
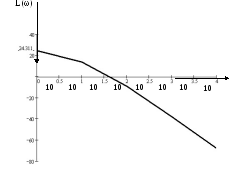
Рис. 5 График ЛАЧХ
-
Статическая ошибка:

Частота среза системы ωс определяется
но графику ЛАЧХ. Это значение частоты,
при котором
 пересекает ось абсцисс и где
пересекает ось абсцисс и где


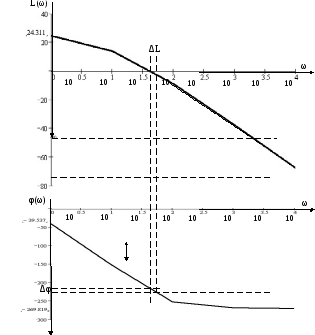
Запасы устойчивости ΔL и Δφ также находятся из логарифмических характеристик.
Рис 6. Запасы устойчивости.
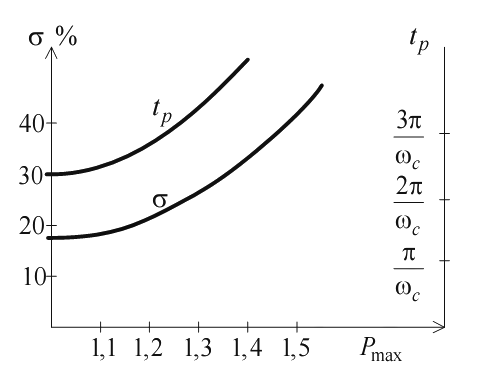
Время регулирования tр и
перерегулирование σ ориентировочно
можно оценить, используя максимальное
значение Рmax
вещественной частотной характеристики

 и частоту среза системы ωс.
и частоту среза системы ωс.

P(ω)
ω
Pmax

Рис. 7 График вещественной частотной характеристики
Показатель колебательности определяют
из графика амплитудно-частотной
характеристики замкнутой системы
 как
как
 .
.
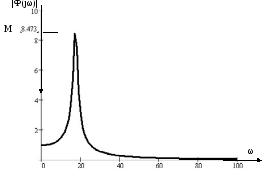
Рис.8 График амплитудно-частотной характеристики замкнутой системы
-
Зная передаточную функцию, связывающую изображения входа и выхода системы, нетрудно получить дифференциальное уравнение, связывающее входную и выходную координаты системы (f = 0):

-
По дифференциальному уравнению, полученному в предыдущем пункте, легко найти уравнения состояния в нормальной форме. Коэффициенты:





 .
.
-
При принятии решения о замене дискретной системы эквивалентной непрерывной системой необходимо сравнить значение периода дискретизации Т с рядом величин, влияющих на процессы в системе. Эквивалентирование возможно при выполнении ряда условий:
1.
 ,
где
,
где наибольшая частота возмущающих и
задающих сигналов. Обычно принимают
наибольшая частота возмущающих и
задающих сигналов. Обычно принимают
2.
 .,
где
.,
где -
время регулирования, а n
- порядок системы.
-
время регулирования, а n
- порядок системы.
3. В следящих системах с учетом динамической
точности ,
где
,
где
 - заданная ошибка слежения,
- заданная ошибка слежения,
 -
максимальное ускорение входного сигнала.
-
максимальное ускорение входного сигнала.
4. С учетом ухудшения запаса устойчивости
 ,
где
,
где - рабочая частота сигналов в системе.
- рабочая частота сигналов в системе.
5. С учетом показателя колебательности

Из всех ограничений выбирают наиболее жёсткое.