

I Исследование линейной непрерывной сау
Исходные данные
Структура исследуемой
замкнутой линейной непрерывной САУ
представлена на рис.1.1, где
![]() –
управляющее воздействие,
–
управляющее воздействие,
![]() –
возмущающее воздействие,
–
возмущающее воздействие,![]() -
сигнал ошибки,
-
сигнал ошибки,![]() -
выходной сигнал. Значения параметров
-
выходной сигнал. Значения параметров
![]() ,
,
![]() ,
,
![]() заданы в табл. 1. Размерность
заданы в табл. 1. Размерность
![]() ,
,
![]() ,
,
![]() в секундах, общий коэффициент передачи
в секундах, общий коэффициент передачи![]() имеет размерность 1/с, в табл. 1 заданы
также желаемые показатели качества
системы: максимальная ошибка по скорости
имеет размерность 1/с, в табл. 1 заданы
также желаемые показатели качества
системы: максимальная ошибка по скорости![]() при скачке по скорости
при скачке по скорости![]() и
и![]() ,
время переходного процесса
,
время переходного процесса![]() в секундах, и перерегулирование
в секундах, и перерегулирование![]() в процентах.
в процентах.
Исходные данные приведены в табл.1
Таблица 1
|
Номер варианта
|
1 |
eck |
tnn |
σ |
|
|
|
|
15 |
2,8 |
0,06 |
3,8 |
10 |
0,23 |
1 |
4,8 |

Рис.1.1
Требуемые передаточные функции находят с использованием правил структурных преобразований. Коротко сформулируем основные правила.
Передаточные функции последовательно соединенных звеньев перемножаются.
Передаточные функции параллельно соединенных звеньев складываются.
Передаточная функция системы с обратной связью – это передаточная функция замкнутой системы, которая определяется по формуле:
Например, для
системы, представленной на рис. 1.2
можно записать следующие передаточные
функции![]() :
:
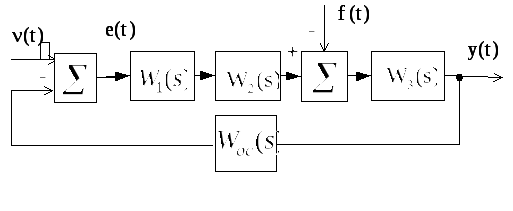
Рис.1.2
Передаточная
функция разомкнутой системы
![]() при
при![]() ,
,![]() (т.е. разомкнута главная обратная связь)
определится выражением
(т.е. разомкнута главная обратная связь)
определится выражением

где обозначено
![]() ,
,
 ,
,
![]() .
.
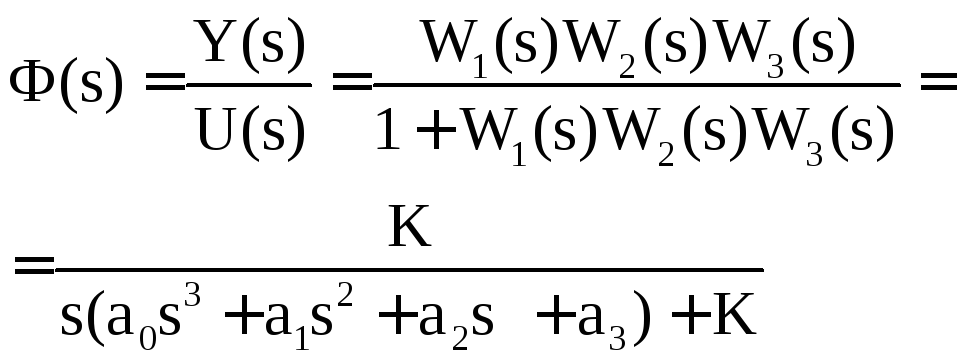
Главная передаточная
функция или передаточная функция
замкнутой системы при
![]() :
:
Передаточная
функция по ошибке при
![]() ,
которая позволяет выразить ошибку e(t)
в системе при известном входном
воздействии:
,
которая позволяет выразить ошибку e(t)
в системе при известном входном
воздействии:

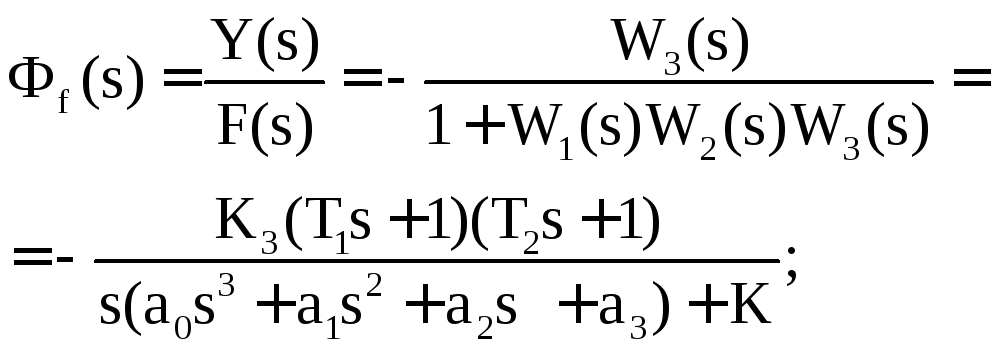
Передаточная
функция по возмущению при
![]() позволяет выразить влияние возмущения
на выходной сигнал:
позволяет выразить влияние возмущения
на выходной сигнал:
Передаточная функция разомкнутой исходной системы имеет вид
 ,
где
,
где .
Характеристическое уравнение замкнутой
системы будет
.
Характеристическое уравнение замкнутой
системы будет ,
где при заданных из таблицы исходных
данных числовых значениях
,
где при заданных из таблицы исходных
данных числовых значениях
 и
и
 коэффициенты
коэффициенты будут зависеть от параметров
будут зависеть от параметров и
и
 .
Применение критерия Гурвица к
характеристическому уравнению четвертого
порядка дает следующие условия
устойчивости:
.
Применение критерия Гурвица к
характеристическому уравнению четвертого
порядка дает следующие условия
устойчивости: .
.
Приравнивая в
написанных соотношениях правые части
нулю, найдем зависимость
![]() от
от
![]() и построим в плоскости
и построим в плоскости![]() и
и
![]() границы устойчивости, ограничивающие
некоторую область устойчивости. При
заданном параметре
границы устойчивости, ограничивающие
некоторую область устойчивости. При
заданном параметре
![]() находим граничное значение
находим граничное значение
![]() коэффициента передачи
коэффициента передачи![]() .
.
![]()
где обозначено
![]() ,
,
 ,
,
![]() ,
,
![]()
Выразим К через параметр Т2.

Зависимость К(Т2) приведена на рис.1.3.

Рис.1.3
При заданном
параметре
![]() находим граничное значение
находим граничное значение
![]() коэффициента передачи
коэффициента передачи![]() .
.
Kгр=K(T2=0.1)= 8.2746.
Полагая
 ,
записываем аналитическое выражение
для
,
записываем аналитическое выражение
для ,
, из
из при
при .
.
К=0.7Kгр= 5.7922.
Передаточную функцию разомкнутой системы можно записать в виде

где
![]()
![]()
![]()
Тогда

![]()
где
![]()
Строим графики логарифмических характеристик разомкнутой системы, с помощью MATLAB(оператор bodeилиmargin) Рис.1.4 а. Предварительно с помощью функцииpaz=tf([K],[a0 a1 a2 a3 0]) найдем
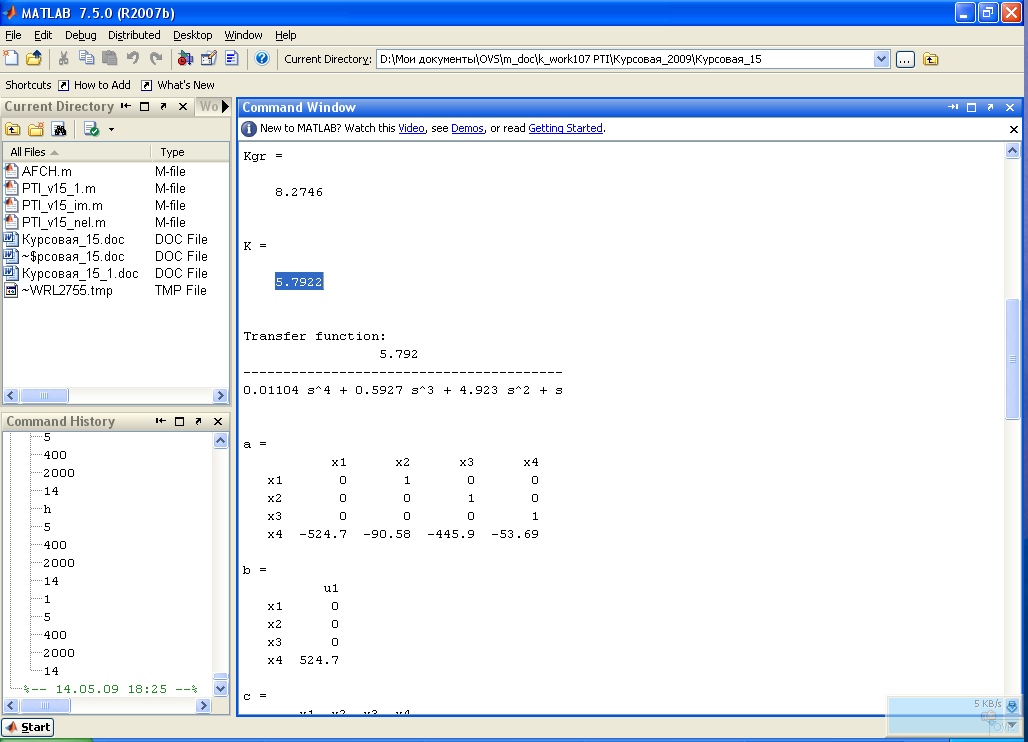
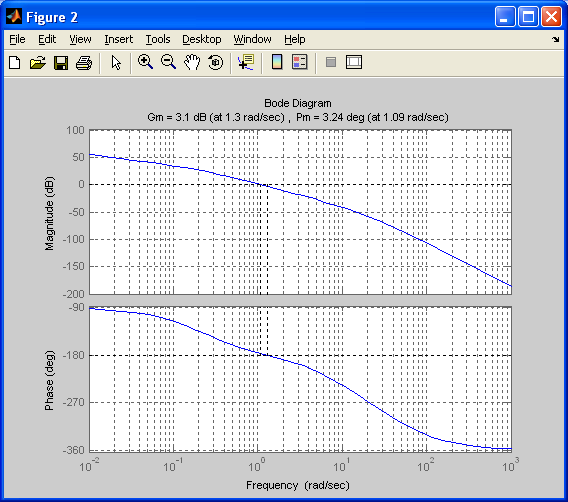
Рис.1.4 а
Вещественная часть частотной характеристики замкнутой системы

Строим график АФЧХ с помощью MATLAB(оператор nyquist) рис.1.4 б для разомкнутой системы.
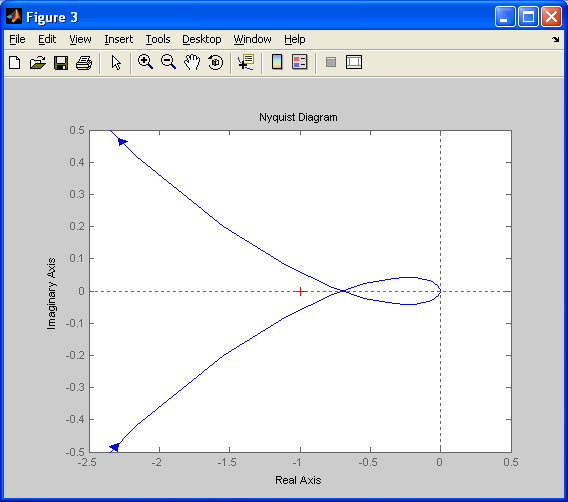
Рис.1.4 б
Запасы устойчивости
по модулю и фазе определяются по
логарифмическим характеристикам (см.
рис.1.4 а): на частоте среза ωсопределяетсязапас
по фазе – ![]() ,
азапас по амплитуде
,
азапас по амплитуде ![]() – на частоте при которой
– на частоте при которой![]() .
Таким образом,
.
Таким образом,![]() ,
что является недостаточным.
,
что является недостаточным.
Величина ошибки по скорости определяется как
 .
Для ориентировочной оценкиtnnи σ следует построить переходной процесс
.
Для ориентировочной оценкиtnnи σ следует построить переходной процесс (операторstepвMATLAB)
при
(операторstepвMATLAB)
при и по нему определитьtnnи σ.
и по нему определитьtnnи σ.
Для получения
уравнений состояний в нормальной форме
используем дифференциальное уравнение
замкнутой системы
![]() .
Если
.
Если![]() ,
то уравнение состояния имеет вид
,
то уравнение состояния имеет вид

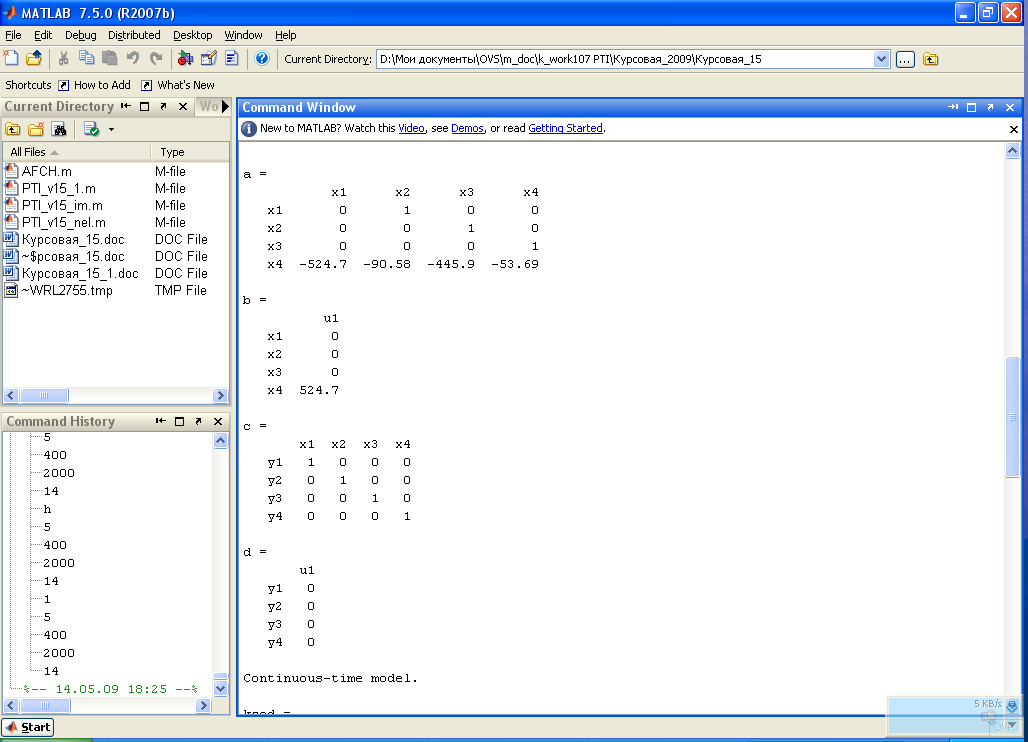
Для описания динамических систем в пространстве состояний в Matlab 7.* применяются модели подкласса ss, которые основаны на линейных дифференциальных или разностных уравнениях.
Модель непрерывной системы в подклассе ss имеет вид:
dx/dt = Ax + B;
y = Cx + D,
где: х - вектор состояния; u- вектор входа; у - вектор выхода.
Для формирования моделей в подклассе ss предназначена функция ss
sys = ss(A, В, С, D).
В результате под именем sys получаем ss-объект с числовыми характеристиками в виде четверки матриц {А, В, С, D}, которые должны иметь согласованные размеры. МатрицуDв данном случае полагаем равной 0.
Для построения
переходного процесса
![]() воспользуемся операторомstepвMATLAB.
воспользуемся операторомstepвMATLAB.
Реализация функций имеет вид:
sys=ss([0 1 0 0;0 0 1 0;0 0 01;-b4/b0 -b2/b0 -b1/b0],[0 0 0 K/b0]',eye(4),zeros(4,1));
step(sys)
В результате получим графики представленные на рис.1.5. Нас будет интересовать Out(1).
Величина ошибки
по скорости определяется как
![]() .
.
Для ориентировочной
оценки tnnи σ следует построить переходной процесс![]() (операторstepвMATLAB)
при
(операторstepвMATLAB)
при![]() и по нему определитьtnnи σ. Эти величины из графикаOut(1)
определяются следующим образом:
и по нему определитьtnnи σ. Эти величины из графикаOut(1)
определяются следующим образом:
 ,
,
Время переходного
процесса определяется с учетом следующих
соотношений: εуст=(t)/(1+K),
где![]() ,
а К=5.7922 – общий коэффициент передачи
разомкнутой системы. Тогда εуст=1/(1+1.964)=
0.15 и следовательноtnnиз графикаOut(1)
,
а К=5.7922 – общий коэффициент передачи
разомкнутой системы. Тогда εуст=1/(1+1.964)=
0.15 и следовательноtnnиз графикаOut(1)![]() .
.
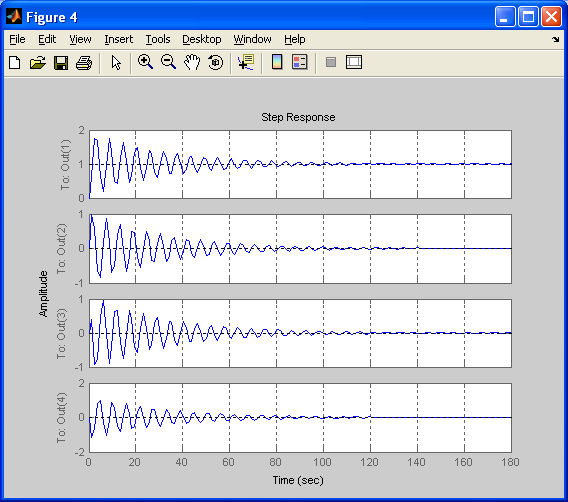
Рис.1.5
Таким образом. исходная система не удовлетворяет заданным показателям качества, ее следует скорректировать.
Если исходная система не удовлетворяет заданным показателям качества, ее следует скорректировать. В случае применения частотных методов синтеза коррекции строится желаемая ЛАЧХ
 .
В низкочастотной части желаемой ЛАЧХ
при сохранении порядка астатизма
(наличие интегратора 1/sв системе) требуемый коэффициент
усиления выбирается из соотношения
.
В низкочастотной части желаемой ЛАЧХ
при сохранении порядка астатизма
(наличие интегратора 1/sв системе) требуемый коэффициент
усиления выбирается из соотношения .
На частоте среза желательно иметь
наклон ЛАЧХ -20 дБ/дек с протяженностью
этого участка не менее одной декады.
Далее среднечастотная часть ЛАЧХ
сопрягается с низкочастотной отрезком
прямой с наклоном -40(если необходимо
-60) дБ/дек, а высокочастотная часть
желаемой исходной ЛАЧХ по возможности
должны совпадать.
.
На частоте среза желательно иметь
наклон ЛАЧХ -20 дБ/дек с протяженностью
этого участка не менее одной декады.
Далее среднечастотная часть ЛАЧХ
сопрягается с низкочастотной отрезком
прямой с наклоном -40(если необходимо
-60) дБ/дек, а высокочастотная часть
желаемой исходной ЛАЧХ по возможности
должны совпадать.
Учет требований
качества переходного процесса: tnnи σ, запасов устойчивости учитываются
при формировании среднечастотной
области![]() .
Здесь можно воспользоваться графиком
(рис.1.6).
.
Здесь можно воспользоваться графиком
(рис.1.6).

Рис.1.6
По графику рис.1.6
для заданных значений
![]() и
и![]() находят
находят![]() и затем из соотношения
и затем из соотношения![]() частоту среза
частоту среза![]() .
.
В наше случае: (как
показано на рис.1.6,а) для
![]() ,
, ,
откуда для
,
откуда для![]() ,
значение
,
значение![]() и
и![]() .
.
Сопряжение
среднечастотного участка с низкочастотным
и высокочастотным (рис. 1.7) должно быть
таким, чтобы была проще коррекция и
чтобы изломы, по возможности, были не
более чем на
![]() (протяженность участка около декады).
Тогда, выберем
(протяженность участка около декады).
Тогда, выберем![]() на частоте
на частоте![]() и
и![]() на частоте
на частоте![]() .
.
Введем обозначения:
Величину ω1
найдем из условия равенства значений![]() .
Это соотношение приводит к следующему
выражению:
.
Это соотношение приводит к следующему
выражению:
![]()
В последнем выражении обозначено:
ω'=0.1ω2
L’(ω')=50 дБ
L’(ω2)=10 дБ
L(ω3р)=L(0.2083)= 25.8695 дБ
L(ω2)=L(0.25)= 23.4214 дБ
Последние две величины находятся из выражения для Lисх(ω).
Найденное по формуле значение ω1=0.1372
ЛАЧХ с корректирующего устройства с характеристикой Lk(ω), приведенной на рис.1.7, соответствует функция (рис.1.7):
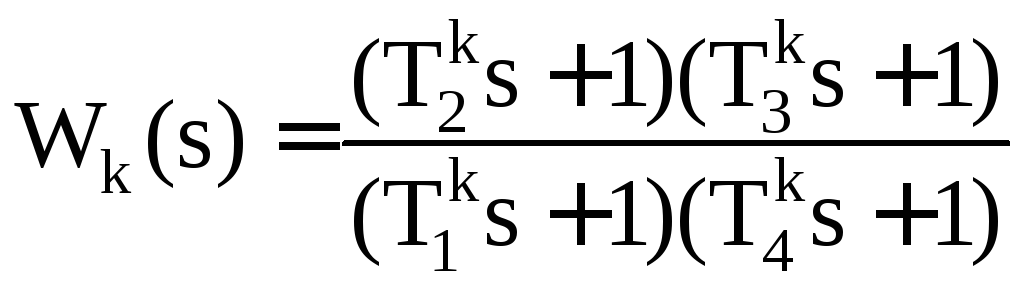
где

Рис. 1.7.
Общая передаточная функция разомкнутой системы с корректирующим звеном последовательного типа имеет вид

где
 .
.
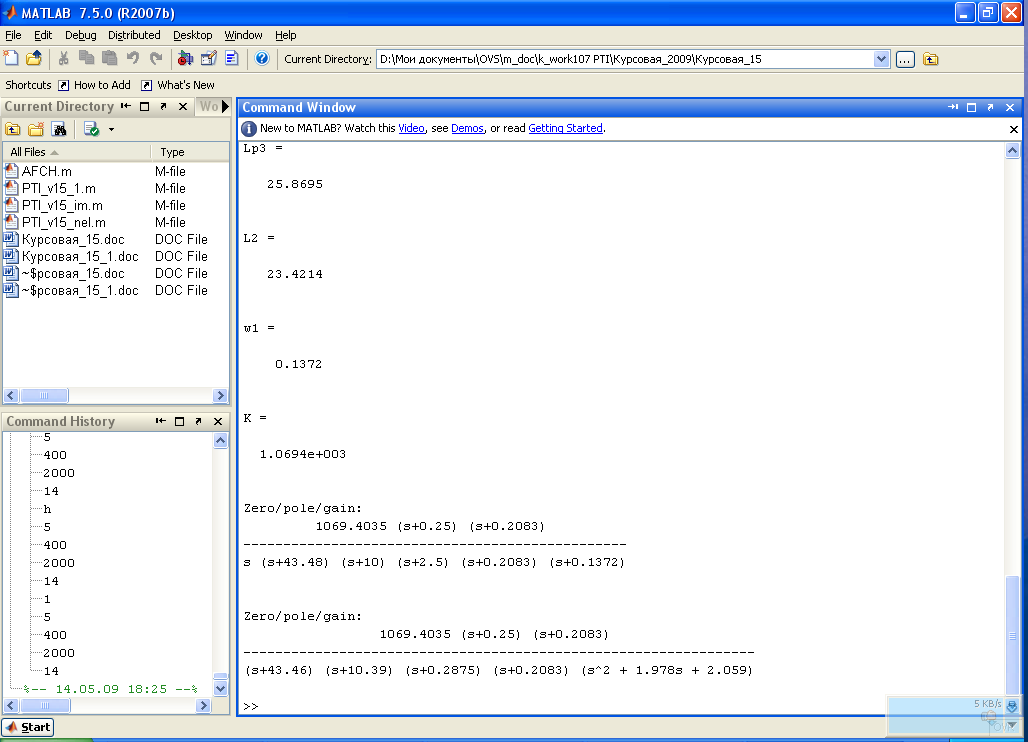
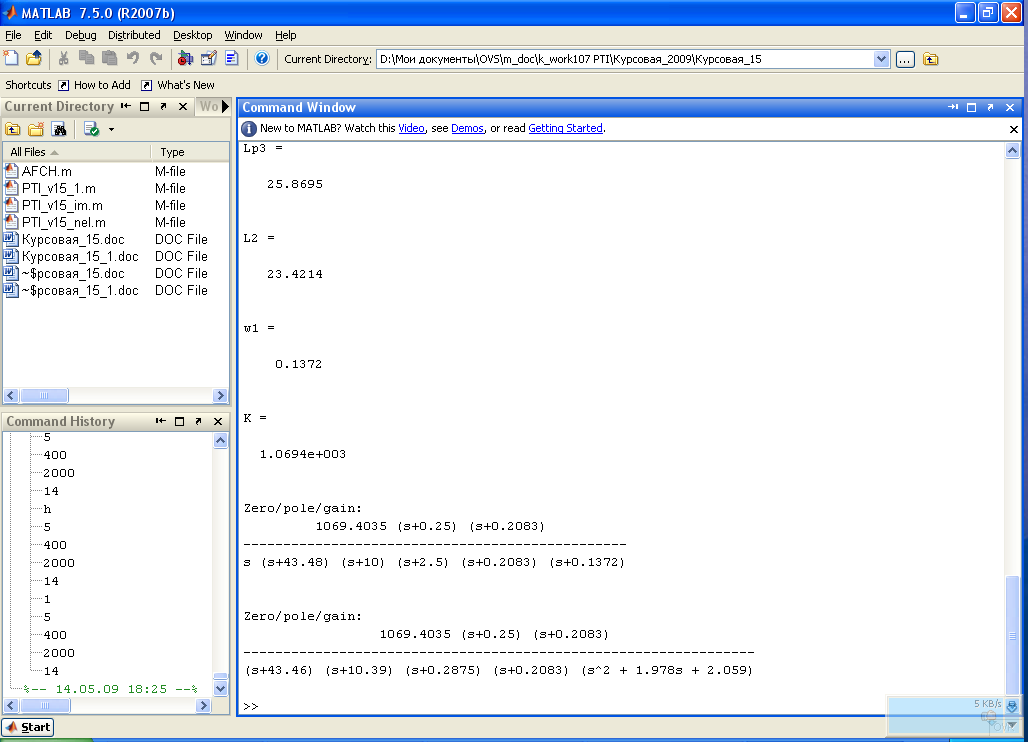
Далее воспользуемся функцией zpk(z, р, К), где z и р – векторы из нулей и полюсов, а Кd – обобщенный коэффициент передачи, sys – любое имя присваиваемое модели. Тогда запись в системе Matlab примет вид
sys1=zpk([-1/T2k -1/T3k],[0 -1/T1 -1/T2 -1/T3 -1/T1k -1/T4k],Kd)
Результат представления sys1 представлен ниже.
Диаграммы Боде (margin(sys1)) представлены на рис.1.8. На диаграмме также обозначены запасы устойчивости, которые являются приемлемыми.

Рис.1.8
Для нахождения переходных характеристик замкнутой системы с корректирующим звеном предварительно сформируем модель в пространстве состояний.
Передаточная функция замкнутой системы имеет вид
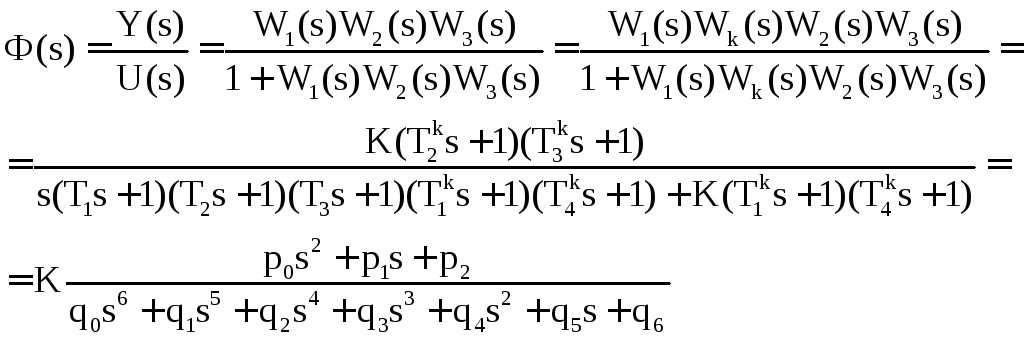
Для нахождения Ф(s) воспользуемся следующей последовательностью команд
sys1=zpk([-1/T2k -1/T3k],[0 -1/T1 -1/T2 -1/T3 -1/T1k -1/T4k],K)
Zam_ck=feedback(sys1) – находится передаточная функция замкнутой системы.
Переходная характеристика (рис.1.9 ) находится с помощью функций:
sys3=ss(Zam_ck)
Из рассмотрения рис. 1.9 видно, что параметры по заданию выполняются.
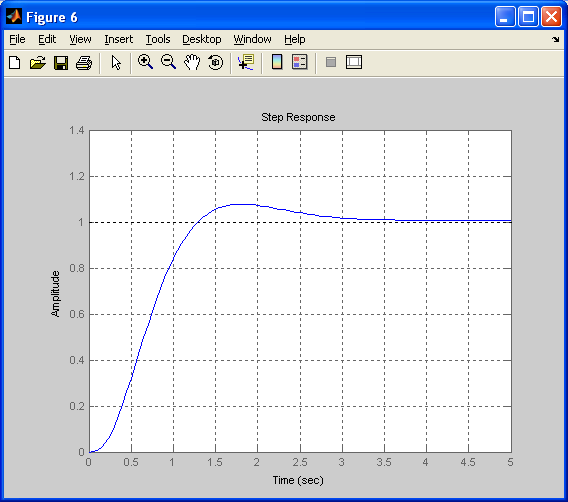
Рис.1.9