

Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие свои колебания в одной плоскости при повороте. Данный тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. Кроме того, микромеханические гироскопы имеют малые энергомассовые характеристики (масса – доли грамма, энергопотребление – доли ватта).
Принцип их действияоснован на эффекте силы Кориолиса. Сила Кориолиса существует в неинерциальной системе отсчёта и проявляется при движении в направлении под углом к оси вращения. Причина появления силы Кориолиса — в поворотном (кориолисовым) ускорении. Для того, чтобы тело двигалось с кориолисовым ускорением, необходимо приложение силы к телу, равнойF=ma, гдеa— кориолисово ускорение. Соответственно, тело действует по третьему закону Ньютона с силой противоположной направленности.FK= −ma. Сила, которая действует со стороны тела, и будет называться силой Кориолиса.
Разновидности: пьезоэлектрические гироскопы; твердотельные волновые гироскопы; камертонные гироскопы; вибрационные роторные гироскопы; МЭМС гироскопы.
Микромеханический вибрационный гироскоп
Устройство. Общий вид чувствительного элемента микромеханического гироскопа-акселерометра показан на рис. 7.
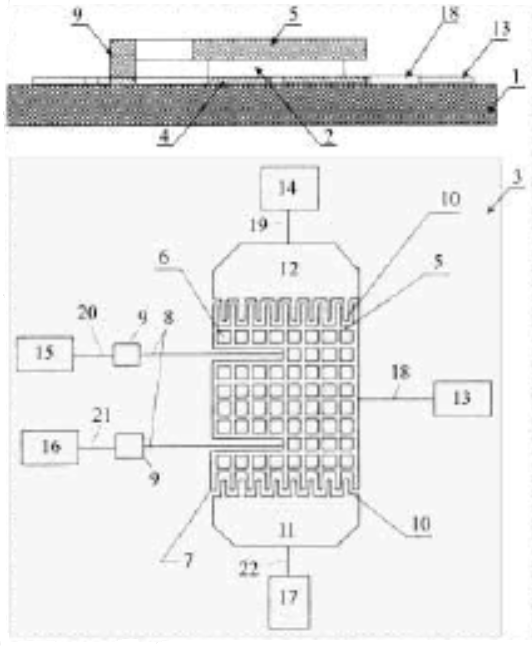
Рис.7. Общий вид чувствительного элемента микромеханического гироскопа-акселерометра
1 – плата из кристалла на основе диэлектрика (3);
2 – элементы электроники и сборки узла чувствительного элемента;
3 – диэлектрик (ситалл, стекло, сапфир, кремний);
4 – электроды датчика угла;
Инерционный узел чувствительного элемента:
5 – пластина на основе кремния или металла;
6 – сквозные отверстия;
7 – боковые стороны пластины в виде гребенчатых зубцов;
Элементы подвеса инерционной массы:
8 – параллельные упругие балочки;
9 – опоры;
Электростатическая система возбуждения:
10 – неподвижные электроды;
11, 12 – опоры;
Соединение:
13-17 – контактные площадки;
18-22 – токопроводящие дорожки;
Питание прибора:
23 – генератор системы электростатического возбуждения;
24, 25 – регуляторы напряжения;
Электронная схема обработки сигнала:
26 – генератор питания для датчика угла;
27 – регулятор напряжения;
28 – фильтр канала акселерометра;
29 – предварительный усилитель;
30 – фазочувствительный выпрямитель;
31 – корректирующий контур;
32 – разделительный фильтр;
33 – второй фазочувствительный выпрямитель;
34 – фильтр канала гироскопа.
Принцип работы. При включенном питании под воздействием электростатических сил в зазорах гребенчатых зубцов пластина (5) колеблется с частотой источника питания. Когда относительно направления, параллельного направлениям балочек (8) упругого подвеса действует угловая скорость, кориолисовы силы, возникающие на той же частоте в направлении, ортогональном плоскости пластины (5), приводят пластину в колебательное движение.
В результате колебательных движений пластины, изменяются зазор и ёмкость между электродами датчика угла, и на его выходе возникает переменное напряжение, амплитуда которого пропорциональна измеряемой угловой скорости.
Если в направлении, ортогональном плоскости пластины (5), действует линейное ускорение, ёмкость между электродами датчика угла и выходной сигнал будут изменяться по закону действующего ускорения.
Таким образом, выходной сигнал прибора содержит две составляющих: периодическую, с амплитудой, пропорциональной угловой скорости основания и постоянную, пропорциональную линейному ускорению основания. Т.е. при помощи такого прибора можно осуществлять одновременное измерение угловой скорости и линейного ускорения.