

Передаточная функция
Передаточная функция – альтернативная форма представления математической модели элемента системы управления, применяемая вместо дифференциального уравнения. Введем для производной функции «у» по времени «t» такое условное обозначение:
![]()
Здесь «р» – символ производной, рассматривается как обычная переменная с одним исключением:
![]()
Вторая производная с учётом такой замены будет выглядеть так:
![]()
Третья производная будет выглядеть так:
![]()
То есть степень «р» соответствует уровню производной.
Тогда дифференциальное уравнение элемента, например второго порядка записанное в общем виде:

![]()
преобразуется таким образом:
![]()
или после вынесения за скобки «х» и «у»:
![]()
Такая
запись называется операторная
форма
дифференциального уравнения. Множитель
операторного уравнения
![]() называется собственным
оператором, а
множитель
называется собственным
оператором, а
множитель
![]() – оператором
воздействия.
– оператором
воздействия.
Произведем некоторые преобразования:
![]()
Отношение оператора воздействия к собственному оператору и есть передаточная функция элемента:

Приложение 3
Метод структурных преобразований
Элементы, входящие в САУ, могут соединяться друг с другом тремя основными способами – типовыми соединениями:
последовательно;
параллельно;
с обратной связью.
При последовательном соединении нескольких звеньев передаточная функция цепи будет равна произведению передаточных функций этих звеньев:
![]()
![]()
При параллельном соединении нескольких звеньев передаточная функция цепи будет равна сумме передаточных функций этих звеньев:
![]()
При соединении звеньев с обратной связью передаточная функция цепи будет определяться по формуле:
![]()
В этой формуле знак «–» соответствует положительной обратной связи, а знак «+» соответствует отрицательной обратной связи.
Метод структурных преобразований заключается в следующем. В структурной схеме САУ выделяют участки, состоящие из нескольких элементов соединенных одним из трех типовых способов. Такой участок заменяют одним звеном, передаточная функция которого определяется по формуле, соответствующей этому типу соединения. Такое последовательное «сворачивание» структурной схемы повторяется до тех пор, пока вся схема не замениться одним элементом.
Полученную таким образом общую передаточную функцию приводят к виду, представленному в конце приложения 2.
Приложение 4
Устойчивость системы управления
Устойчивость системы управления – способность возвращаться в состояние равновесия после снятия внешних воздействий.
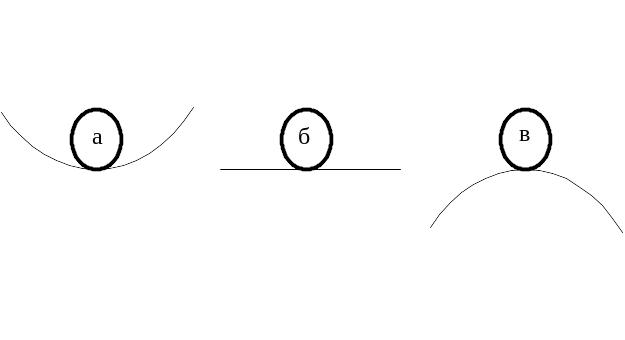
На рисунке:
а) система устойчива,
б) система нейтральна,
в) система неустойчива.
На практике для определения устойчивости систем невысоких порядков пользуются упрощенными условиями Гурвица.
Система 1-го или 2-го порядка устойчива, если все коэффициенты собственного оператора (см. приложение 2) одного знака.
![]()
Для системы 3-го порядка добавляется дополнительное условие.
![]()
Для системы 4-го порядка дополнительное условие другое.
![]()
Приложение 5