

Определение динамической характеристики
Таблица 2
Экспериментальные данные
-
Время, с
Х, %хода
Y, единицы регулируемой величины
0
ХН
..
...
..
..
ХК
..
Изменить положение вала ИМ на 15-20% хода. Зафиксировать в журнале время хода ИМ из начального состояния ХН в конечное ХК и величину возмущения Х = ХК – ХН.
С момента изменения положения вала ИМ фиксировать по шкале вторичного прибора изменение во времени выходного параметра через каждые 3-7 с, занося данные в журнал наблюдений.
Используя полученные значения, построить график траектории кривой разгона объекта. Примерный вид кривой разгона показан на рис.4.
Графическим методом определить динамические параметры объекта: з, ТО, КОБ, , .
5 Содержание отчета
Назначение статической характеристики, виды характеристик.
Таблица рабочего журнала наблюдений.
График статической характеристики ОУ.
График функции КОБ, полученный экспериментальным и расчетным путем.
Определения передаточной функции, кривой разгона. Виды кривых разгона.
Динамические параметры объекта, формулы для их расчета.
Таблицу рабочего журнала и расчет динамических параметров технологического объекта.
График экспериментальной кривой разгона.
Выводы по работе.
6 Контрольные вопросы
Статическая характеристика ОУ. Виды статических характеристик.
Коэффициент передачи объекта. Метод определения.
Что такое передаточная функция объекта?
Как подразделяются ОУ по виду кривых разгона?
Какие количественные оценки динамических свойств объекта вы знаете? Приведите формулы.
Лабораторная работа № 10 определение качественных показателей работы системы автоматического регулирования
1 Цель работы
Экспериментальное определение показателей качества переходного процесса в САУ технологического параметра.
2 Общие положения
В наши дни наибольшее распространение получили одноконтурные следящие системы регулирования. Структурная схема такой системы представлена на рис.1.
На САУ воздействуют два вида возмущающих воздействий:
задающее воздействие ХЗ;
внутреннее f и внешнее F возмущающие воздействия.
В связи с этим система управления должна удовлетворять следующим требованиям:
с максимальной точностью и быстродействием отрабатывать сигнал задания: ХД(t) = ХЗ(t);
по возможности быстро реагировать на возмущения f(t) и F(t), то есть ошибка () = ХЗ – ХД под действием возмущений должна быть минимальной.
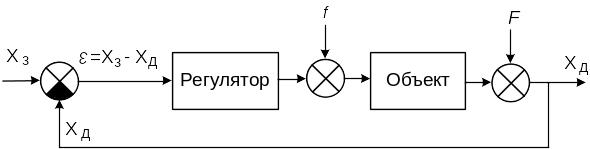
Рис.1. Структурная схема САУ
Качество работы САУ является одной из важнейших её характеристик. Для оценки уровня качества работы системы, в ТАУ введены количественные оценки качества.
Получить общую оценку качества в виде функциональной зависимости от множества структурных, технических и эксплуатационных характеристик системы достаточно сложно. Поэтому о качестве САУ судят в первую очередь по устойчивости статической и динамической точности.
Устойчивость САУ, то есть затухание переходных процессов в системе, является необходимым, но не достаточным условием практической пригодности этой системы.
Существенное значение для реальных промышленных условий имеет и сам характер протекания переходного процесса Z() при регулировании; прежде всего его продолжительность и колебательность.