

К. П. Д. Блоков отклоняющих.
О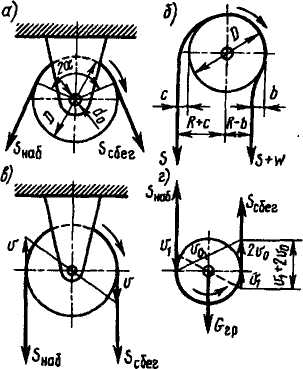 тклоняющим
называется блок, который изменяет
направление движения охватывающего
каната. Отклоняющий блок, установленный
неподвижно, называется неподвижным, а
блок, перемещающийся в пространстве,
называется подвижным.
тклоняющим
называется блок, который изменяет
направление движения охватывающего
каната. Отклоняющий блок, установленный
неподвижно, называется неподвижным, а
блок, перемещающийся в пространстве,
называется подвижным.
На рис.5.23, а показан неподвижный блок, вращающийся по часовой стрелке под действием силы SСБЕГ, преодолевающей силу SНАБ. Вращение блока возможно только в том случае, если SСБЕГ > SНАБ, причем разность SСБЕГ – SНАБ должна быть достаточна для преодоления сопротивления сил трения в опоре блока и сопротивления жесткости каната или цепи при их сгибании и разгибании.
Блоки: а– блок с неподвижной осью; б– схема набегания каната на блок; в– схема скоростей каната на неподвижном блоке; г– схема скоростей каната на подвижном блоке
Так как канаты, применяемые в грузоподъемных машинах, не являются абсолютно гибкими телами, а имеют определенную жесткость, то набегающая ветвь каната не сразу ложится на ручей блока, а сбегающая ветвь не сразу выпрямляется (рис.5.23, б). Жесткость каната зависит от его диаметра, конструкции, числа проволок в прядях и числа прядей, от типа и конструкции сердечника, от механических свойств материала проволок и от трения между отдельными проволоками и между прядями. Жесткость цепи определяют в основном по сопротивлению сил трения в шарнирах пластинчатой цепи или сил трения между звеньями сварной цепи.
Для сгибания и разгибания каната к его сбегающей ветви необходимо приложить дополнительную силу W, которая зависит от размеров и конструкции каната и блока, а также от натяжения каната. Ее можно определить из уравнения моментов сил относительно оси блока (рис.5.23, б) без учета сил трения в опоре блока:
ΣМО=S (R+c)– (S+W) (R–b)=0,
S (R+c)= (S+W) (R–b),
W (R–b) = S (R+c) – S (R–b),
W
= S
 = φS
,
= φS
,
где R = D/2 - радиус ручья блока; φ– коэффициент жесткости: его значение определяют экспериментально.
Уравнение моментов всех действующих сил относительно оси блока (рис.5.23, а) имеет такой вид:
ΣМО= SНАБ R + W R + N f d0 / 2 – SСБЕГ R = 0,
SСБЕГ R = SНАБ R + φ SНАБ R + N f d0 / 2,
где N–- нагрузка на ось блока, равная геометрической сумме сил SНАБ и SСБЕГ; dо– диаметр оси блока; f– коэффициент трения в опоре блока.
При определении значения N с некоторым допущением можно принять SНАБ ≈ SСБЕГ и тогда при угле обхвата блока канатом 2α
N = 2 SНАБ sin α .
Подставив это соотношение в уравнение моментов, получим
SСБЕГ
= SНАБ
(1 + φ
+
2
f
 sin
α).
sin
α).
Коэффициент полезного действия блока - это отношение полезной работы SНАБ h при подъеме груза весом Grp на высоту h к полной работе, совершенной при этом силой SСБЕГ на том же пути h с учетом преодоления потерь на трение и жесткости каната. Поэтому для неподвижного блока, у которого перемещение набегающей и сбегающей ветвей каната одинаково, КПД выражается формулой
η
= SНАБ
/ SСБЕГ
=
 .
.
Анализ этой формулы показывает, что чем больше угол обхвата блока канатом, а также чем больше жесткость каната и трение в опоре блока, тем меньше значение КПД блока и тем больше дополнительная сила, которую необходимо приложить к канату, чтобы обеспечить равномерное движение груза. На КПД блока наиболее существенное влияние оказывают потери на трение в опоре блока, зависящее от конструкции и состояния опоры, поэтому при практических расчетах с достаточной степенью точности КПД блока принимают независящим от диаметра и конструкции каната, от размеров блока и от угла обхвата его канатом.
Для блоков с опорой на подшипниках скольжения η = 0,95... 0,96; для блоков на подшипниках качения η = 0,97...0,98. Меньшие значения принимают для блоков, работающих при повышенной температуре или в запыленной или загазованной среде. Тогда натяжение ветви тягового элемента, набегающей на блок,
Sнаб = η Sсбег.
При обегании канатом неподвижного блока скорости движения набегающей и сбегающей ветви равны между собой (рис.5.23, в). Если же набегающая ветвь каната со скоростью V1 (рис.5.23, г) набегает на подвижной блок, ось которого перемещается со скоростью Vо, то скорость сбегающей ветви каната равна
Vсбег = V1 + 2V0.
Основной характеристикой полиспаста является его кратность m, т.е. отношение скорости V ветви каната, набегающей на барабан, к скорости Vгр подъема груза
m = V / Vгp ,
где V = πD2n6ap/60; [1] стр180
D2 - диаметр барабана, измеренный по центру сечения каната;
nбар - частота вращения барабана, об/мин.
Частота вращения подвижного блока полиспаста определяется из следующих соображений:
Частота вращения подвижного блока должна обеспечивать скорость набегающей ветви каната V1 и скорость перемещения оси блока V0 , тоесть
Vокр = V1 + V0 ,
где Vокр = π D п / 60
V1=Vсбег – 2V0 – скорость набегающей ветви;
Vсбег = m Vгp,– скорость сбегающей на барабан ветви;
V0 = Vгр – скорость груза.
Тогда
π D п / 60 = Vсбег – 2V0+ V0 = Vсбег – V0 ,
Выразив Vсбег через m и Vгp и заменив V0 на Vгp получим:
π D п / 60 = m Vгp – Vгp ,
п
=
 ,
[2]
стр116
,
[2]
стр116
где Vгp — скорость подъема, м/с;
m — кратность полиспаста;
 D
- диаметр
блока, измеренный по центру сечения
каната.
D
- диаметр
блока, измеренный по центру сечения
каната.
Для одинарного полиспаста кратность численно равна числу сечений канатов, на которых подвешен груз (сечение К - К на рис.5.24).
Развернутая схема обегания канатом блоков одинарного (простого) силового полиспаста приведена на рис.5.24. При отсутствии сопротивлении в полиспасте, т.е. когда система является неподвижной, сила в любой точке каната полиспаста S0= = Gгр / m, где Grp – вес груза; m - число сечений (ветвей) каната.
Схема силового полиспаста
При подъеме или опускании груза вследствие действия сил сопротивления от жесткости каната и от трения в опорах блоков натяжение отдельных ветвей каната различно. Обозначим S1 натяжение ветви каната, идущей на обводной блок А1; S2 -натяжение следующей ветви и т.д. В общем случае при кратности полиспаста m натяжение последней неподвижно закрепленной ветви каната равно Sm. Отсюда
S1 + S2 + S3 + … + Sm-1 + Sm = Gгр.
Соотношение между натяжениями отдельных ветвей каната при подъеме груза
S2 = S1η; S3 = S2η = S1 η2; S4 = S1 η3; Sm-1 = S1 ηm-2; Sm = S1 ηm-1,
где η - КПД блока.
Используя эти соотношения, получаем
Gгр = S1 (1 + η + η2 + ... + ηm-2 + ηm-1).
Вычислив сумму геометрической прогрессии (выражение в скобках), определим соотношение между весом груза Gгр и натяжением каната S1 при параллельном расположении ветвей полиспаста без учета динамических нагрузок:
S1
= Gгр

Натяжение Sбар каната подводимого к барабану Б, больше натяжения S1, поскольку необходимо преодолевать сопротивление в обводных блоках A1, A2, A3. Если число обводных блоков равно t, максимальное натяжение каната при подъеме груза
Sбар
= Smax
=
 = Gгр
= Gгр

При опускании груза максимальное натяжение Smax будет в последней ветви
Sm = Gгр
КПД полиспаста, имеющего кратность m, в целом определяется как отношение полезной работы при подъеме груза Gгр на высоту h к затраченной при этом работе Sбар m h:
ηпол
=
 =
=

При этом максимальное натяжение в системе полиспаста при подъеме груза
Smax = Gгр /(m ηпол).
Подвижный блок, который следует рассматривать как полиспаст с кратностью m= 2, согласно уравнению КПД полиспаста, имеет КПД ηподв = (1 + η)/2, т.е. несколько превышающий значение КПД неподвижного блока.