

1.4. Розрахунок регулятора
1.4.1. Апроксимація перехідної характеристики об'єкта керування.
Об'єкти керування підрозділяються на об'єкти із самовирівнюванням і без самовирівнювання. Перші апроксимуються послідовним з'єднанням ланки транспортного запізнювання й аперіодичної ланки першого порядку.
Послідовному з'єднанню відповідає перемножування передатних функцій, так що
Коб
Wоб ( s ) = Wт ( s ) * Wап ( s ) = e - 0 s *
Тоб s +1
Друга група об'єктів апроксимується послідовним з'єднанням ланки транспортного запізнювання й інтегруючого ланки:
0 1
Wи ( s ) = =
s Tи s
Передаточна функція об'єкта має вид:
0
Wоб ( s ) = Wт ( s ) * Wи ( s ) = e - 0 s *
s
1.4.2. Розмірності постійних часу і коефіцієнтів передатних функцій об'єкта.
Дуже часто як розмірність вхідного сигналу ( параметра ) використовується відсоток регулювання регулюючого органа (% Р.О.).
[ Коб ] = од.вих./од.вх.; [ Тоб ] = с;
[ Е0 ] = (од.вих./од.вх.)*1/с; [ Ти ] = (од.вх./од.вих.)*с;
Тут параметр Е0 – швидкість розгону об'єкта без самовирівнювання. Цей параметр використовується замість Коб, тому що об'єкт не має рівноважного стану. Е0 є швидкістю зміни Коб.
1.4.3. Криві розгону, перехідні характеристики об'єкта.
Крива розгону-реакція об'єкта на східчастий вхідний вплив. Перехідна характеристика-реакція об'єкта на одиничний східчастий вхідний вплив.
Для кривої розгону по вертикальній осі відкладається сам параметр Y, од.входу ( для об'єктів із самовирівнюванням і без самовирівнювання ).
Для перехідної характеристики об'єктів 1-го класу по вертикальній осі відкладається значення параметрів h(t), од.вих./од.вх.( у сталому стані цей параметр дорівнює Коб ). Для кривої розгону величина скачка дорівнює величині реально нанесеного збурення, для перехідної характеристики - 1.
Експериментально завжди одержують криву розгону , яку потім приводять до перехідної характеристики, тобто перераховують на одиничний скачок.
Нижче приведені криві розгону і перехідні характеристики об'єктів 1-го і 2-го класів:
Крива розгону.
Об'єкт із самовирівнюванням Об'єкт без самовирівнювання


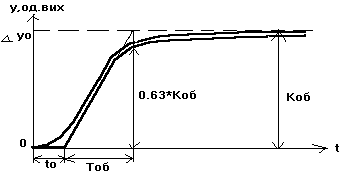
Dy0 Коб
Коб = ¾¾ Wоб ( s ) = Wт ( s ) * Wап ( s ) = e - t0 s * ¾¾¾
Du0 Тоб s +1
ó 0 , якщо 0 £ t £ t0
h ( t ) = í
î Коб ( 1 - e (t - t0 ) / tоб ) ,якщо t > t0 .
Перехідна характеристика
Об'єкт із самовирівнюванням Об'єкт без самовирівнювання


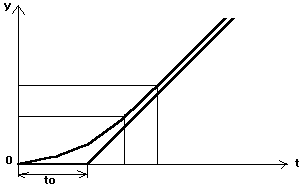

Dy 1 Dh ( t )
e0 = ¾¾ * ¾¾ ; e0 = tga = ¾¾¾¾ ;
Du Dt D t
e0
Wоб ( s ) = e - t0 s * ¾¾¾ ;
s
ó 0 , якщо 0 £ t £ t0
h ( t ) = í
î e0 ( t - t0 ) , якщо t > t0 .
У більшості випадків приведеної апроксимації цілком достатньо. При необхідності відображення в подальших розрахунках більш жорстких вимог до САР варто збільшувати величину транспортного запізнювання, а не підвищувати порядок аперіодичної ланки при такому ж транспортному запізнюванні.
1.4.4. Розрахунок настройок регулятору.
Будемо робити розрахунок ПІ-регулятора для одноконтурної САР.
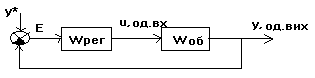
e = ( y* - y ) - неузгодженість ( розбаланс ).
1
Wрег = Кр ( 1 + ¾¾ ) ,
Тиs
де Кр - коефіцієнт передачі регулятора, од.вх./од.вих.,
Ти – час інтегрування.
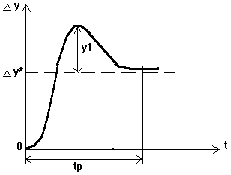
1.4.5. Типові перехідні процеси в замкнутій САР.
Виділяють 3 основних типових перехідних процеси: аперіодичний, процес з 20%-м перерегулюванням, процес з мінімумом квадратичного інтегрального критерію ( з 40%-м перерегулюванням ).
У замкнутій САР знімають перехідні процеси по двох каналах передачі впливів: " зміна завдання у-зміни вихідного параметра у ", '' збурення з боку Р.О.- зміна вихідного впливу u ".
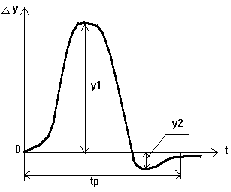
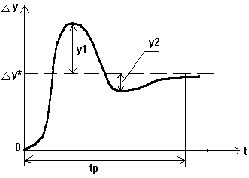
Нижче приведені типові перехідні процеси по зазначених каналах передачі впливів із вказівкою основних показників якості перехідних процесів:
- тривалість регулювання tp ( тривалість перехідного процесу );
- максимальне динамічне відхилення y1;
-
перерегулювання , h=![]() ,
%
;
,
%
;
-
ступінь загасання y
=![]() ;
;
-
квадратичний інтегральний критерій
Iкв
= ;
;

![]()
![]()


![]()
Перехідні процеси приведені для статичних об'єктів.
а).аперіодичний;
б).с 20%-м перерегулюванням;
в).с мінімумом квадратичного інтегрального критерію.
Тривалість регулювання tp мінімальна для аперіодичного процесу, більша для 20%-го перерегулювання, ще більше для процесу з мінімумом квадратичного інтегрального критерію.
Динамічне відхилення y1 максимальне для 1-го процесу, менше для 2-го, ще менше для 3-го.
Перший процес завжди неколивальний, другий процес має саме 2 напівперіоди коливань, третій процес має саме 3 напівперіоди коливань. Для гармонійних коливань ( система на границі стійкості ) ψ = 0, η =100%.
На практиці найчастіше знімають перехідний процес при збуренні з боку навантаження .

lвн - внутрішнє збурення чи збурення з боку Р.О.;
lн - зовнішнє збурення чи збурення по навантаженню.
Перехідні процеси при збуренні lвн і збуренні за завданням різні і для цих перехідних процесів оптимальними є різні настроювання. Перехідний процес по каналу " y*®ε", так як по цих каналах об'єкт має однакові передатні функції.
e y 1
¾ = ¾ = ¾¾¾¾¾ ,
y* lн 1 +Wоб Wp
тому оптимальні настроювання для зазначених збурень однакові.
З ряду причин було б доцільно визначати настройки регулятора для збурення за навантаженням ( технологічно це збурення більш реальне і є більш важким чим збурення lвн; перехідний процес збігається зі збуренням за завданням для неузгодженості e). Однак, історично склалося так, що як типове збурення був прийнятий саме скачок з боку Р.О. ( це збурення по характеру збігалося з основним регулюючим каналом об'єкта: "u - y"; разом з тим збурення з боку lн могли бути найрізноманітнішими по походженню ).
Інженерні методи розрахунку настроювань регуляторів орієнтовані саме на скачок з боку Р.О.
1.4.6. Вибір типу регулятора.
Тип регулятора вибирається в залежності від t0
співвідношення r = ¾¾ ;
Тоб
r <0.2 - релейний;
r >1.0 - імпульсний;
0.2 £ r £ 1.0 -безупинний.
Ми будемо виконувати розрахунок тільки для безупинного регулятора.
1.4.7. Динамічний коефіцієнт регулювання.
Для розрахунків у якості проміжної допоміжної величини використовується так званий динамічний коефіцієнт регулювання Rд, який розраховується таким способом:
для статичного об'єкта для астатичного об'єкта
y1 1 y1 Tоб
Rg= ¾¾ × ¾¾ ; Rg = ¾¾ × ¾¾ ;
Du0 Коб Du0 t0
де Тоб - постійна часу інтегруючого ланки ( Ти );
y1 Tоб
Rg = ¾¾ × ¾¾ ;
Du0
![]() *t0
*t0
Rg - величина безрозмірна.
Фізичний зміст Rg - показує, у скількох разів динамічне відхилення у1 менше при наявності регулятора в порівнянні зі сталим значенням при відсутності регулятора ( для статичного об'єкта ).
1.4.8. Формули для розрахунків настроювань ПІ-регулятора.
Приведені нижче спрощені (інженерні) формули для розрахунку настроювань називаються "металургійними" (вони були отримані в результаті багаторазових досліджень автоматниками працюючими в області металургії ). Існують і інші спрощені формули ( формули ВТІ та ін. ).
Статичний об'єкт / ПІ-регулятор.
Аперіодичний
|
20 % h
|
min Iкв |
0.6 Kp = ¾¾¾¾ Коб*t0/Тоб
Ти = 0.6*Тоб
|
0.7 Kp = ¾¾¾¾ Коб*t0/Тоб
Ти = 0.7*Тоб |
1.0 Kp = ¾¾¾¾ Коб*t0/Тоб
Ти = Тоб |
Астатичний об'єкт / ПІ-регулятор
Аперіодичний
|
20 % h |
min Iкв |
1 Kp = 0.4 ¾¾¾ e0* t0
Ти = 6*t0
|
1 Kp = 0.7 ¾¾¾ e0* t0
Ти = 3*t0
|
1 Kp = 1.0 ¾¾¾ e0* t0
Ти = 9*t0
|
1.4.9. Порядок розрахунку настройок ПІ-регулятора.
1).Вибирається тип перехідного процесу.
2).Для обраного типу перехідного процесу розраховуються Кр і Ти за вищенаведеною таблицею.
3).Для обраного типу перехідного процесу розраховується динамічне відхилення у1 і тривалість регулювання tp.
4).Якщо у1 і tp задовольняють, розрахунок настроювань закінчений, якщо ні - розрахунок повторюється, починаючи з вибору типу перехідного процесу.
У загальному випадку можна зробити і так: задатися параметрами у1 і tp, за допомогою параметра Rg визначити, який тип перехідного процесу забезпечує необхідний у1, потім для цього процесу розрахувати Кр і Ти.
Нижче наведена таблиця для визначення Rg регулятора.
Статичний об'єкт.
t0/Tоб |
Rg |
Тип регулятора |
0.1 |
0.2 0.15 0.05 |
Апер 20 % h min Iкв |
0.5 |
0.62 0.55 0.5 |
Апер 20 % h min Iкв |
1.0
1.5 |
0.9 0.85 0.78 1.0 0.95 0.9 |
Апер 20 % h min Iкв Апер 20 % h min Iкв |
Динамічне відхилення у1 на основі коефіцієнта Rg розраховується таким чином:
для статичного об'єкта у1=Rg*(Коб*D u0);
для астатичного об'єкта у1=Rg*(e0*t0* Du0);
Коб, E0,t0 - параметри об'єкта;
u0 - величина збурення lвн із боку Р.О.
Нижче наведена таблиця для визначення часу регулювання tp.
Статичний об'єкт.
-
8
Апер
tp/t0
14
20 % h
16
min Iкв
![]() ;
;
Примітка Після розрахунку параметрів Кр і Ти, які забезпечують необхідні значення у1 і tp, провести цифрове моделювання одноконтурної САР за допомогою програми "GАММА":
- для розрахованих Кр і Ти зняти перехідні процеси в замкнутої САР при збуренні з боку Р.О. і завдання;
- порівняти у1 і tp цих перехідних процесів із припущеними;
- якщо перехідні процеси виходять поганими, провести розрахунок оптимальних настроювань по програмі "GАММА", одержати перехідні процеси і порівняти їх з раніше отриманими;
- зробити висновки.
1.4.10. Розрахунок регулюючого блоку

Схема одержання закону регулювання:

z Ку 1
W( p ) = ¾ = ¾¾¾¾¾ = ¾¾¾¾¾ ;
e 1 + Ку Wос 1/Ку + Wос
За рахунок зони повернення формуються імпульси. Замість Кр у таких регуляторах - швидкість зворотного зв'язку Vос ( швидкість наростання сигналу ).
[Vзв]= % ВБ регулятора/сек.
aп = 1/Vзв.
У результаті розрахунку регулятора одержали параметри Кр і Ти. Промисловий регулюючий блок має наступні параметри настроювання:
D - половина зони нечутливості;
tи - тривалість імпульсу. Визначається величиною зони повернення ( гістерезісом ) трипозиційного релейного елемента

Тдф - постійна часу демпфера ( постійна часу аперіодичної ланки 1-го порядку );
Ти - час інтегрування ПІ-закону регулювання;
Vзв - швидкість зв'язку ( швидкість наростання місцевого негативного зворотного зв'язку в регулюючому блоці, за рахунок якої формується П - частина ПІ-закону регулювання);
aп - часто використовується замість швидкості зв'язку, пропорційний коефіцієнту передачі регулятора Кр;
[D]=% ВБ, [tи]=сек;
[Ти]=сек, [Тдф]=сек, [Vзв] = %ВБ / сек.
За рахунок зони повернення при спрацьовуванні в сторону "більше" чи "менше" РБ формує короткочасні імпульси. Такий режим називається пульсуючим ( ковзаючий режим - невірна назва ), іноді говорять, що регулятор працює в режимі частих включень в одну сторону. Такий режим необхідний для лінеаризації нелінійного елемента на виході регулятора - ВМ постійної швидкості, який в результаті такої лінеаризації апроксимується інтегруючою ланкою. Такі регулятори часто називають імпульсними РБ, підкреслюючи що виходом цього регулятора є серія імпульсів постійної амплітуди і перемінної шпаруватості ( час-імпульсна модуляція ). Правильно говорити - релейно-імпульсний регулятор чи безупинний регулятор, який працює в режимі частих включень в одну сторону. Відхилення від такого пульсуючого режиму недопустимі, тому що тоді ВМ не може розглядатися як лінеарізований, а САР є нелінійною.
1.4.11. Розрахунок швидкості зв'язку.
Швидкість зв'язку ( Vзв ) розраховується по наступній формулі:
Квб
Vзв=Sp.o.*
––––– ,
![]()
Кр
Параметр Vзв повинен лежать у межах: Vзв=0,1..2,5 %ВБ/с.
де Sp.o. - швидкість переміщення Р.О.;
Квб - коефіцієнт пропорційності ВБ;
Кр - коефіцієнт передачі регулятора;
[Sp.o.]=% Р.О./сек; [Квб]=% ВБ/од.вих ;
[Кр]=% Р.О./од. вих;
Параметр Sp.o. розраховується за формулою
Sp.o.=100 % Р.О./Твм,
де Твм - постійна часу виконавчого механізму ( ВМ ),
[Твм]=сек.
Виконавчі механізми типу МЕО маркіруються в такий спосіб: наприклад, МЕО 25/100-0,25, де 25 - зусилля на валу ВМ (кг*м); 100 - Твм(сек); 0,25 – кут повороту 900, час повертання 4*Твм.
Зусилля на валу ВМ визначається розрахунковим способом за конструктивними даними РО. Постійна часу ( Твм ) визначає тривалість повного переміщення вала ВМ.
Виконавчі механізми вибирають з ряду:
МЕО 1,6/40; МЕО 63/100; МЕО 1000/250;
МЕО 4/100; МЕО 400/100; МЕО 4/25;
МЕО 25/100; МЕО 160/100; МЕО 4/10;
МЕО 63/63; МЕО 63/250.
співвідношення: Твм=(1...4)* tоб.
Квб розраховується по формулі:
[Квб]=100 % В.Б./(Ymax-Ymin);
де Ymax-Ymin - діапазон вимірювання регульованого параметру вимірювальним блоком регулятора.
Загальний порядок розрахунку динаміки АСР.
1).Одержати перехідну характеристику об'єкту, обробити її, одержати параметри об'єкту.
2).Розрахувати параметри настроювання ПІ-регулятора для об'єкта орієнтуючись на типовий перехідний процес.
3). З використанням програми "GАММА" одержати перехідний процес в замкненій САР і порівняти з очікуваним.
4).Розрахувати параметри настроювання промислового регулюючого блоку. Вказати наближене значення інших параметрів настроювання регулюючого блоку.
1.4.12. Розрахунок чутливості САР здійснюється за формулами:
![]()



за потужністю

за амплітудою
1.4.13. Цифрові ПІ-регулятори представлені різницевими рівняннями з оператором запізнення
Оператор
запізнення:
![]() .
.
![]()
Цифровий
інтегратор
![]()
Цифровий
диференціатор
![]()
![]()
D Þ П П Þ И
D-частина Þ П-частина при інтегруванні виконавчим механізмом постійної швидкості.
П-частина Þ И-частина при інтегруванні виконавчим механізмом постійної швидкості.