

§ 73. Судовые электрические телеграфы и рулевые указатели.
Судовые электрические машинные телеграфы относятся к системам синхронной связи, которые обеспечивают командную связь между рулевой рубкой и машинным отделением. По принципу действия системы синхронной связи подразделяются на системы импульсного действия и индукционные.
В системах импульсного действия синхронная передача перемещений осуществляется отдельными равными импульсами тока, а перемещение выходных органов, механически между собой не связанных, происходит скачкообразно.
Индукционная система синхронной передачи в отличие от импульсной обеспечивает плавное перемещение выходных органов.
Основными элементами системы синхронной передачи являются: датчик (ведущее звено), посредством которого передаются приказания; приемник (ведомое звено), воспроизводящий переданное приказание, и линия связи между ними.
В настоящее время на судах широко применяется индукционная система синхронной передачи. Основные элементы этой системы - сельсины, которые представляют собой электрические машины с однофазной обмоткой возбуждения и трехфазной синхронизирующейся обмоткой. Однофазная обмотка возбуждения подключается к сети переменного тока и может находиться на статоре или роторе, а трехфазная синхронизирующаяся обмотка соединена в звезду и расположена соответственно на роторе или статоре. В бесконтактных сельсинах обе эти обмотки выполнены на неподвижных частях специальных магнитопроводов.
С точки зрения характеристик системы и принципа действия относительное расположение обмоток не имеет значения.
Принципиальная схема синхронной связи состоящая, из одного датчика и одного приемника, дана на рис. 2.149. Обмотки возбуждения сельсинов получают питание от одного и того же источника переменного тока, а синхронизирующие обмотки соединены между собой таким образом, чтобы их э.д.с. были направлены навстречу одна другой и при одинаковом положении роторов в пространстве были равны, т. е. уравновешивали друг друга.
При повороте ротора сельсина-датчика BG на некоторый угол альфа нарушится равенство э. д. с, индуктируемых в фазах синхронизирующих обмоток сельсина - датчика и сельсина - приемника BE. Между ними возникнет уравнительный ток, который вызовет появление синхронизирующего вращающего момента, направленного в сторону уменьшения угла рассогласования между роторами сельсина-датчика и сельсина-приемника. При закрепленном роторе сельсина - датчика под действием синхронизирующего момента ротор сельсина - приемника повернется на тот же угол альфа, что и ротор сельсина-датчика.
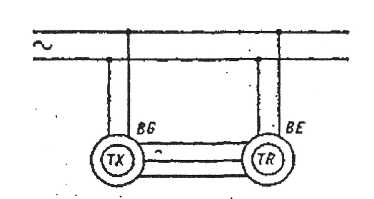
Рис. 2.149. Принципиальная схема индукционной системы синхронной
связи.
Система синхронной передачи позволяет подсоединить к одному сельсину - датчику несколько сельсинов - приемников, т. е. получить соответствующее число контрольных постов управления.
Особенностью судового машинного телеграфа, как средства передачи фиксированных команд, является совмещение в одном приборе элементов двусторонней связи - датчика и приемника, работающих на одну общую шкалу с текстами команд, и наличие системы сигнализации. На рис. 2.150 приведена принципиальная схема машинного телеграфа с индукционной самосинхронизирующейся системой передачи.
Основными элементами схемы являются: передатчик - приемник, состоящий из сельсина - датчика BG1, сельсина - приемника ВЕ2, бленкера HL1, зуммера НА1, понижающего трансформатора TV, регулирующего резистора R и четырех ламп накаливания EL для освещения шкал; приемник-передатчик, состоящий из сельсина - приемника ВЕ1 и ответного сельсина - датчика BG2; следящая система с реле сигнализации К и бленкером HL1; прибор контроля реверсирования КР, скомплектованный из двух контактных систем КР1 (А4) и КР2 (А2); сигнальные приборы (звонок НА2, сигнальная лампа HL2 и ревун НАЗ).
Следящая система приемника - передатчика предназначена для автоматического включения сигнальных приборов в машинном отделении при подаче сигнала и их выключения при подаче правильного ответа.
При повороте рукоятки сельсина - датчика BG1 в положение, при котором стрелка устанавливается против соответствующего текста приказа шкалы телеграфа, возникает рассогласование системы и появляется синхронизирующий момент. Ротор сельсина - приемника ВЕ1 повернется на заданный угол поворачивая механически-связанный с ним диск 1 следящей системы. В результате произойдет замыкание контактов а и б. Реле сигнализации К получит питание. Оно сработает и замкнет свои контакты К в цепи ревуна НАЗ и сигнальной лампы HL2, которые сигнализируют вахтенному персоналу машинного отделения о подаче команды. В рулевой рубке включается зуммер НА 1.
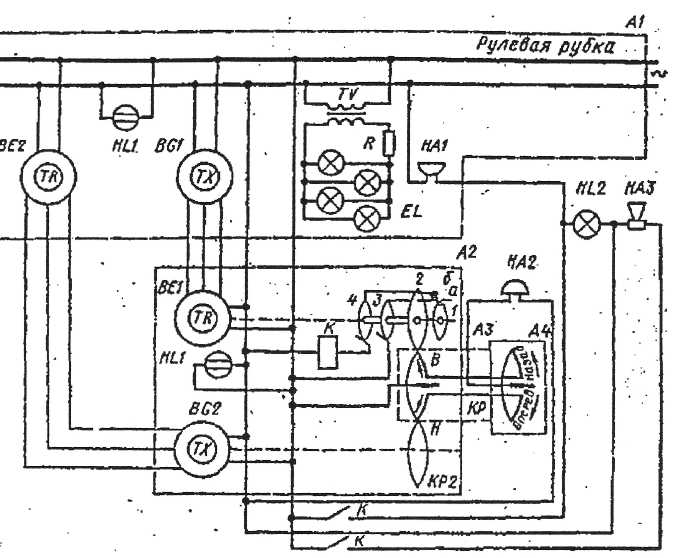
Рис. 2.150. Принципиальная схема машинного телеграфа с индукционной самосинхронизирующейся системой передачи.
При ответе одновременно с поворотом ротора сельсина - датчика BG2 повернутся: диск 2 и контактные кольца 3 и 4, имеющие через систему шестерен механическую связь с ротором сельсина - датчика BG2. Контакт а вновь установится против выреза диска 1. Это приведет к размыканию контактов а и б. В результате обесточится катушка реле сигнализации К, которое разомкнет свои контакты в цепи приборов сигнализации и их действие прекратится.
Контактная система КР1 (А4) прибора контроля реверсирования КР (A3) установлена в пульте управления главными дизелями, а контактная система КР2 (А2) установлена в корпусе приемника - датчика.
Контактная система состоит из латунных сегментов, по которым скользит контактная щетка. В контактной системе КР1 (А4) контактная щетка механически связана с рычагом реверсирования двигателя, а в контактной системе КР2 (А2) контактная щетка через шестеренную передачу соединена с рукояткой сельсина - датчика BG2.
При ответе контактная щетка системы КР2 (А2), следуя за рукояткой сельсина - датчика, поворачивается и скользит, предположим, по сегменту В. Если рычаг реверсирования при выполнении команды вахтенным механиком повернут в направлении «Вперед», то контактная щетка системы КР1 (А4) будет скользить по сегменту «Вперед». Приказ выполнен правильно, и звонок НА2 действовать не будет. Если приказ выполнен неправильно и рычаг реверсирования повернут в направлении «Назад», то контактная щетка системы КР1 (А4) будет скользить по сегменту «Назад», что приведет к замыканию цепи питания звонка НА2, срабатывание которого привлечет внимание вахтенного механика на его ошибку.
Принципиальная схема рулевого указателя с индукционной самосинхронизирующейся системой передачи приведена на рис. 2.151.
Основными элементами схемы являются: сельсин-датчик BG, имеющий механическую связь с баллером руля; сельсины - приемники ВЕ1 и ВЕ2, один из которых установлен в рулевой рубке, другой - в аварийном посту управления; сигнальные бленкеры HL и лампы подсветки EL. Лампы подсветки включены через понижающий трансформатор TV. Резистором R регулируется яркость подсветки ламп. При перекладке руля поворачивается и ротор сельсина - датчика BG, что вызывает нарушение равновесия в системе, синхронной связи. Это приводит к появлению синхронизирующего, момента, в результате которого повернутся на тот же роторы сельсинов - приемников ВЕ1и ВЕ2. Приемники имеют шкалу, градуированную в градусах (до 40°) в обе стороны от нулевого положения. Указательная стрелка на этих шкалах покажет угол перекладки пера руля.
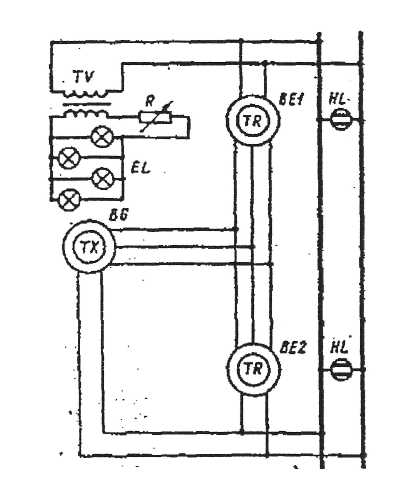
Рис. 2.151. Принципиальная схема рулевого указателя с индукционной
самосинхронизирующейся системой передачи.
На судах, где в качестве основного принят постоянный ток, применяют машинные телеграфы с импульсной системой синхронной связи, принципиальная схема которого показана на рис. 2.152. Схема состоит из двух датчиков В1 и В2, двух приемников U1 и U2, двух сигнальных реле К1 и К2, ревуна НА1 и трещотки НА2. В связи с тем что схема получает питание непосредственно от судовой сети, напряжение которой равно 110 и 220В, а электромагнитные катушки приемников рассчитаны на 55 - 75В, то в цепь катушек включены добавочные резисторы R1 и R2.
Датчики В1 и В2 состоят из коммутатора, представляющего собой барабан из изоляционного материала, на поверхности которого укреплен контактный сегмент, охватывающий дугу 132°. По поверхности барабана скользят три щетки I, II, III, с помощью которых подается питание электромагнитным катушкам приемников U1 и U2. Приемники U1 и U2 состоят из трех парных электромагнитов, расположенных под углом 120° один по отношению к другому, и системы передачи движения (тяги, кривошип, эксцентрик).
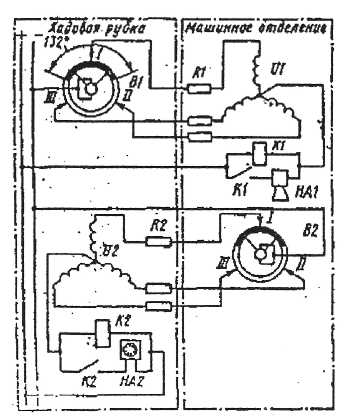
Рис. 2.152. Принципиальная схема машинного телеграфа с импульсной
системой синхронной связи.
При повороте рукоятки датчика В1, расположенного в ходовой рубке, произойдет вращение его барабана, что вызовет последовательное замыкание контактным сегментом щеток I, II и III. В результате попеременно будут получать питание электромагнитные катушки приемника III, расположенного в машинном отделении. Стрелка приемника U1 и стрелка датчика В1 установятся против одного и того же деления шкалы с заданным текстом команды. При вращении барабана датчика В1, получает питание сигнальное реле К1, которое сработает и, замыкая свой контакт К1, подключит на напряжение ревун НА1. С прекращением вращения барабана цепь ревуна разомкнётся. Приняв сигнал, вахтенный механик поворачивает рукоятку датчика, находящегося в машинном отделении, до совмещения стрелок датчика В2 и приемника U1. В ходовой рубке синхронно с вращением барабана датчика В2 будет поворачиваться приемник U2, и его стрелка совместится со стрелкой датчика В1. Это указывает на то, что приказание машинным отделением принято правильно. Одновременно с вращением барабана датчика В2 получит питание катушка сигнального реле К2, которая замкнет свой контакт К2 и включит трещотку НА2. С прекращением вращения барабана датчика В2 цепь трещотки разомкнётся. На судах с постоянным током рулевые указатели работают также по принципу импульсной системы синхронной связи.