

§ 58. Системы управления с дросселями и управляемыми выпрямителями
Применение в системах управления асинхронными двигателями управляемых дросселей позволяет получить регулируемый электропривод.
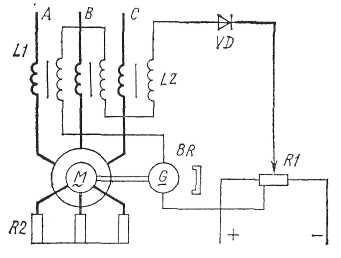
Рис. 2.116. Схема системы с управляемым дросселем.
На рис. 2.116. приведена схема электропривода по системе управляемый дроссель - асинхронный двигатель. Рабочие обмотки L1 управляемого дросселя включены в цепь статорной обмотки асинхронного двигателя М. Обмотки управления L2 включены на разность задающего напряжения и э. д. с. тахогенератора BR, установленного на одном валу с двигателем. Тахогенератор осуществляет в системе отрицательную обратную связь по скорости. Задающее напряжение устанавливается потенциометром R1. Для уменьшения пускового тока двигателя и получения большего вращающего момента при его работе на пониженных скоростях в цепь ротора включены добавочные резисторы R2. Диод VD предотвращает протекание тока по обмоткам управления L2 в обратном направлении. Этот момент может наступить, если задающее напряжение будет меньше э. д. с. тахогенератора.
С увеличением нагрузки на асинхронный двигатель М наблюдается снижение его угловой скорости. Это вызовет уменьшение э. д. с. на зажимах тахогенератора BR. Увеличится разность между задающим напряжением и э. д. с. тахогенератора. В результате по обмотке управления пойдет больший постоянный ток, подмагиичивая дроссель. Индуктивное сопротивление его рабочих обмоток уменьшится, что приведет к уменьшению на них падения напряжения. Напряжение на статорной обмотке двигателя увеличится, что приведет к увеличению угловой скорости двигателя М.
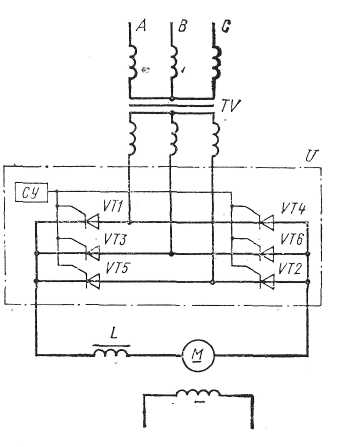
Рис. 2.117. Схема системы тиристорного управления двигателем постоянного
тока.
В судовых системах переменного тока в настоящее время находит применение управление двигателями как постоянного, так и переменного тока с помощью кремниевых управляемых вентилей (тиристоров). На рис. 2.117 показана схема системы тиристорного управления двигателем постоянного тока. Вторичные обмотки силового (анодного) трансформатора TV соединены в звезду. К этим обмоткам подключен тиристорный преобразователь U, состоящий из шести тиристоров VT1 - VT6 и системы управления (СУ). В трехфазной мостовой схеме тиристорного преобразователя тиристоры VT1, VT3, VT5 составляют группы тиристоров с общими катодами, а тиристоры VT4, VT6, VT2 - группу с общими анодами. В этой схеме работают одновременно два тиристора, по одному из каждой группы. При этом ток нагрузки протекает последовательно через два тиристора и две фазы трансформатора. За полный период изменения переменного напряжения работают все шесть тиристоров. К тиристорному преобразователю подключена якорная цепь двигателя М с независимой обмоткой возбуждения. Для сглаживания пульсаций выпрямленного тока применен дроссель L. При помощи СУ изменяют угол отпирания а тиристоров, что позволяет плавно и в широких пределах регулировать напряжение, подводимое к якорной обмотке двигателя. А это приводит к регулированию угловой скорости двигателя постоянного тока. Механические характеристики двигателя постоянного тока при тиристорном управлении аналогичны характеристикам исполнительного двигателя системы Г - Д. Отличительной особенностью является увеличение крутизны характеристик при тиристорном управлении.
Тиристорное управление применяется также и при управлении асинхронными двигателями для регулирования угловой скорости путем изменения напряжения или частоты тока, подводимых к двигателю. Изменение напряжения осуществляется тиристорным регулятором напряжения, а изменение частоты тока - тиристорным преобразователем частоты.