

§ 45. Механические характеристики электродвигателей переменного тока
Наибольшее распространение в судовом электроприводе получили асинхронные двигатели с короткозамкнутым ротором (рис. 2.92, а). Они отличаются простотой в обслуживании, надежностью в работе, меньшими габаритами и массой, долговечностью и более дешевы в изготовлении по сравнению с электродвигателями постоянного тока.
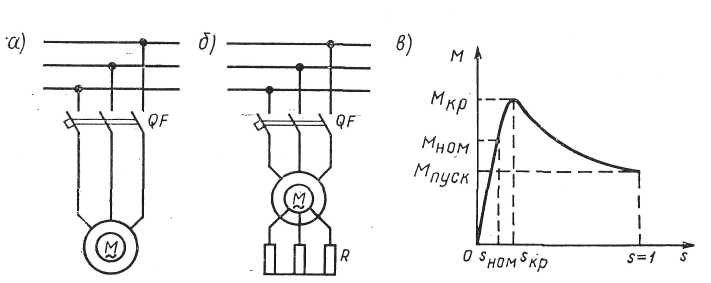
Рис. 2.92. Асинхронный двигатель:
а - с короткозамкнутым ротором; б - с фазным ротором; в - механическая характеристика.
Обмотка короткозамкнутого ротора выполняется в виде беличьего колеса. В отличие от него фазный ротор имеет в пазах трехфазную обмотку, аналогичную обмотке статора. Начала фаз роторной обмотки присоединяются к контактным кольцам, укрепленным на валу двигателя.
При помощи контактных колец и щеток в цепь ротора можно включить реостат R для уменьшения пускового тока и регулирования угловой скорости (рис.2.92, б).
Принцип действия асинхронных двигателей основан на явлении вращающегося магнитного поля. Трехфазный переменный ток, протекая по обмотке статора, создает в асинхронном двигателе магнитное поле, вращающееся с синхронной угловой скоростью
ω![]() = 2πf
/р,
= 2πf
/р,
где f - частота тока питающей сети, Гц;
р - число пар полюсов статора.
Это магнитное поле, пересекая обмотку ротора, индуктирует в ней э. д. с. Е , под действием которой в цепи ротора потечет ток
I
=E
/![]() ,
,
где r , х - соответственно активное и индуктивное сопротивления неподвижного ротора.
Ток ротора, взаимодействуя с магнитным полем статора, создает вращающий электромагнитный момент
М = k I Ф соsψ ,
где k - постоянная величина для данного двигателя;
Ф - полный магнитный поток статора, Вб;
ψ - угол сдвига между э. д. с. и током ротора.
Под действием этого момента ротор вращается в ту же - сторону, что и магнитное поле статора, но с отставанием от него. Угловая скорость ротора
ω = ω (1 - S),
где S = (ω - ω)/ ω - скольжение асинхронного двигателя, которое изменяется от единицы (при пуске) до значения, близкого к нулю (при холостом ходе).
Отставание ротора от вращающегося поля статора (скольжение) является необходимым условием работы асинхронного двигателя. Вращающееся поле статора вращается относительно ротора с угловой скоростью ω = ω - ω.
Индуктируемая при этом в роторе э. д. с. будет иметь частоту
![]() .
.
Частота тока в
роторе изменяется от
![]() = 50 Гц (при пуске) до
=
1 ÷ 2 Гц и менее (при холостом ходе). В
связи с изменением во вращающемся роторе
частоты
изменяются и зависящие от нее э. д. с.
E
= 50 Гц (при пуске) до
=
1 ÷ 2 Гц и менее (при холостом ходе). В
связи с изменением во вращающемся роторе
частоты
изменяются и зависящие от нее э. д. с.
E![]() ,
индуктивное сопротивление х
,
а следовательно, ток ротора I
и cos ψ
."
,
индуктивное сопротивление х
,
а следовательно, ток ротора I
и cos ψ
."
E = Е s;
x = x s;
I
= E
/![]() ;
;
cos ψ = r / .
Анализ формулы вращающего электромагнитного момента, развиваемого ротором асинхронного двигателя (М = k I Ф соsψ ), показывает сложную зависимость этого момента от скольжения s, так как с изменением скольжения изменяются ток ротора I и его cos ψ .
Зависимость момента от скольжения M = f(s) называется механической характеристикой асинхронного двигателя, которая представлена на рис. 2.92, в.
Как видно из
рисунка, асинхронный двигатель в начале
пуска
при s
=
l развивает
сравнительно небольшой пусковой момент
М
,
так как активная составляющая тока
ротора (I
cos
ψ
)
в это время имеет небольшое значение.
По мере разгона
двигателя
до так называемого критического
скольжения s![]() момент двигателя увеличивается до
максимального значения М
(или критического момента М
),
а затем уменьшается по мере приближения
к скольжению s = 0. В связи с тем что
аналитическое уравнение механической
характеристики имеет довольно сложный
вывод, воспользуемся для анализа ее
приближенным уравнением
момент двигателя увеличивается до
максимального значения М
(или критического момента М
),
а затем уменьшается по мере приближения
к скольжению s = 0. В связи с тем что
аналитическое уравнение механической
характеристики имеет довольно сложный
вывод, воспользуемся для анализа ее
приближенным уравнением
![]()
где М - текущее значение момента, Н·м;
М - критическое значение момента, Н·м;
s - текущее значение скольжения;
s - критическое значение скольжения.
Значение критического скольжения можно определить по формуле
s
= s
(![]() ),
),
где s = (ω - ω )/ ω - номинальное скольжение;
![]() = М
/
М
- перегрузочная способность двигателя
по моменту.
= М
/
М
- перегрузочная способность двигателя
по моменту.
Чтобы перейти от механической характеристики M = f(s) к механической характеристике ω = f(M), нужно сделать переход от скольжения s к угловой скорости ω, воспользовавшись зависимостью ω = ω (1 - S). Зависимость ω = f(M) представлена на рис. 2.93, а. Верхний участок механической характеристики от ω до ω является рабочей частью характеристики, на которой электродвигатель может работать устойчиво. Нижний участок характеристики, ниже ω , является нерабочей частью характеристики, на которой двигатель не может работать устойчиво. На этой части характеристики электродвигатель работает в период переходного процесса пуска. Если в цепь ротора асинхронного двигателя с фазным ротором включить добавочные резисторы с различными активными сопротивлениями r , то можно получить семейство искусственных механических характеристик (рис. 2.93, б), проходящих через точку с координатами: М = 0,
ω = ω
,
так как синхронная скорость ω
не зависит от активного сопротивления
цепи ротора. Значение максимального
(критического) момента М
остается также неизменным, так как не
зависит от активного сопротивления
роторной цепи. С увеличением активных
сопротивлений (r![]() > r
> r![]() ),
включенных в роторную цепь, увеличивается
пусковой момент М
уменьшается критическая скорость ω
и увеличивается мягкость (крутизна)
искусственных характеристик.
),
включенных в роторную цепь, увеличивается
пусковой момент М
уменьшается критическая скорость ω
и увеличивается мягкость (крутизна)
искусственных характеристик.
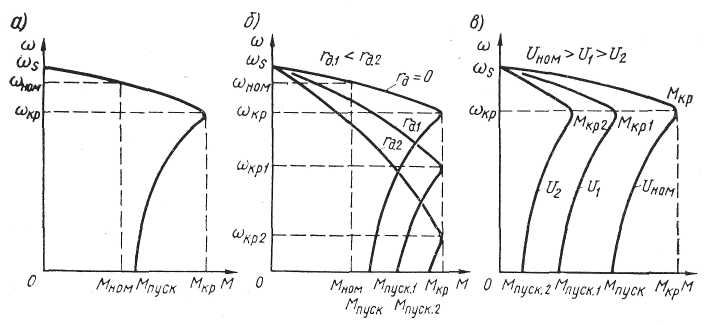
Рис. 2.93. Механические характеристики асинхронного двигателя.
Искусственные механические характеристики асинхронного двигателя можно получить изменением подводимого к электродвигателю напряжения (рис.2.93, в). С изменением напряжения (U > U > U ) синхронная ω и критическая ω угловые скорости остаются неизменными. Резко уменьшается критический момент М , значение которого прямо пропорционально квадрату напряжения U. Уменьшается также и пусковой момент М . Вследствие этого пуск и работа асинхронного двигателя при снижении напряжения возможны лишь при небольших нагрузках на валу.
Механическая характеристика синхронного двигателя представляет собой прямую линию, параллельную оси моментов, и является абсолютно жесткой. В пределах устойчивой работы угловая скорость ω = 2πf /р синхронного двигателя не зависит от момента нагрузки на его валу. Однако увеличение момента на валу сверх допустимого может вывести двигатель из синхронизма, т. е. к его остановке. Перегрузочная способность синхронных двигателей по моменту
= М / М = 2,0 ÷ 2,5.